You might also like
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Fyp-Obstacle Avoiding RobotDocument50 pagesFyp-Obstacle Avoiding RobotGiang BùiNo ratings yet
- Experiment 1Document16 pagesExperiment 1Izhharuddin100% (2)
- Lab 6 - Experiment On Portal FrameDocument2 pagesLab 6 - Experiment On Portal FrameEriey ZuhairiNo ratings yet
- 03 AccII Sem03 HandoutDocument2 pages03 AccII Sem03 HandoutGul ZamanNo ratings yet
- Allianz Care Plus Brochure Update 19mar2015 FA R3 5Document11 pagesAllianz Care Plus Brochure Update 19mar2015 FA R3 5Leonard Yang0% (1)
- 590 Blood DonationDocument19 pages590 Blood DonationazwarNo ratings yet
- How Do I Download Entire Websites and Convert Them Into One PDF - Quora PDFDocument1 pageHow Do I Download Entire Websites and Convert Them Into One PDF - Quora PDFR KNo ratings yet
- Saad explores ARP and switching operationsDocument9 pagesSaad explores ARP and switching operationsSaad Kabir Prottoy100% (1)
- TOSHIBADocument25 pagesTOSHIBAArun Pathania0% (1)
- PBL5 HarmonicsDocument8 pagesPBL5 HarmonicsAmirul HafizNo ratings yet
- Tutorial 1Document4 pagesTutorial 1Unta Di PadAng PaSirNo ratings yet
- Lab 7 (Cascaded Amplifier Design) - Sept 20Document8 pagesLab 7 (Cascaded Amplifier Design) - Sept 20WilfredNo ratings yet
- Electrical Equivalent of HeatDocument4 pagesElectrical Equivalent of HeatReddyvari VenugopalNo ratings yet
- Midnight Veggie Club Reveals Carrots' PrejudiceDocument16 pagesMidnight Veggie Club Reveals Carrots' PrejudiceSam EspinosaNo ratings yet
- Well-Known Mark CaseDocument1 pageWell-Known Mark CaseHo You WeiNo ratings yet
- Relationship Between Steam Pressure and TemperatureDocument8 pagesRelationship Between Steam Pressure and TemperatureQamarul AimanNo ratings yet
- Pad390 - Notes On Chapter 4Document5 pagesPad390 - Notes On Chapter 4LunaNo ratings yet
- AMEM211 Lab2 PotentiometerDocument10 pagesAMEM211 Lab2 PotentiometerB.s. BhosleNo ratings yet
- Demonstrate teamwork in IBS scoring for a construction drawingDocument7 pagesDemonstrate teamwork in IBS scoring for a construction drawingNuratiqah SharifahNo ratings yet
- Courts Malaysia Retailer Consumer Electronics FurnitureDocument17 pagesCourts Malaysia Retailer Consumer Electronics FurnitureYiNg YaNgNo ratings yet
- Lab 1Document4 pagesLab 1Abdalla Fathy100% (1)
- Report EcmDocument8 pagesReport EcmMohamad Khaled NordinNo ratings yet
- Wire Cut EDM Process for UTeM Letter FabricationDocument5 pagesWire Cut EDM Process for UTeM Letter FabricationAmilin HatiaraNo ratings yet
- Data Sheet Experiment 3 Synthesis of Potassium Tris (Oxalato) Ferrate (III) TrihydrateDocument1 pageData Sheet Experiment 3 Synthesis of Potassium Tris (Oxalato) Ferrate (III) TrihydrateELF SJNo ratings yet
- Answer Asm 652Document5 pagesAnswer Asm 652Farah FarahinNo ratings yet
- Expt 5Document5 pagesExpt 5Jerick VizNo ratings yet
- Sample Q & A Chapter: Leverage & Capital Restructuring: Before Restructuring After RestructuringDocument3 pagesSample Q & A Chapter: Leverage & Capital Restructuring: Before Restructuring After Restructuringnur fatinNo ratings yet
- Ohm's Law Experiment Demonstration and AnalysisDocument13 pagesOhm's Law Experiment Demonstration and AnalysisainnorNo ratings yet
- CH 01Document16 pagesCH 01rajeshaisdu009No ratings yet
- Open Channel Hydraulics GuideDocument49 pagesOpen Channel Hydraulics GuideSue Ila100% (1)
- Office Strife: Reading File 10Document2 pagesOffice Strife: Reading File 10robnovis67% (3)
- Exp6 chm213Document5 pagesExp6 chm213Muhd Mirza HizamiNo ratings yet
- EMM 3502 LAB MANUAL - PRESSURE CONTROL SYSTEM TUNINGDocument7 pagesEMM 3502 LAB MANUAL - PRESSURE CONTROL SYSTEM TUNINGPuti FikriNo ratings yet
- Tutorial 4Document3 pagesTutorial 4Sofiya YusNo ratings yet
- Ainun Nur Annisa Azmi - 2019228728 - Lab ReportDocument23 pagesAinun Nur Annisa Azmi - 2019228728 - Lab ReportnyssaNo ratings yet
- 11-Bulk DeformationProcesses (Chapter 15)Document142 pages11-Bulk DeformationProcesses (Chapter 15)Taher al suhamiNo ratings yet
- Hartley Oscillator: LC Circuit Design for RF ApplicationsDocument8 pagesHartley Oscillator: LC Circuit Design for RF ApplicationsirishjoymartinNo ratings yet
- List Graduate 2018Document28 pagesList Graduate 2018mukhzinrashid0% (1)
- Assessing Internal Resources And Capabilities For Competitive AdvantageDocument26 pagesAssessing Internal Resources And Capabilities For Competitive Advantageareep94No ratings yet
- MPU3242 IMjuly19Project BBMS L03F MiniaturePortableArtificalKidney Luqman 0133133922Document36 pagesMPU3242 IMjuly19Project BBMS L03F MiniaturePortableArtificalKidney Luqman 0133133922Hema KuganNo ratings yet
- GPVDM Simulation PDFDocument6 pagesGPVDM Simulation PDFNaas DjeddaouiNo ratings yet
- Rope Climbing RobotDocument7 pagesRope Climbing RobotSaw Beng KeatNo ratings yet
- Electrical Distribution StagesDocument2 pagesElectrical Distribution StagesBatrisyialya RusliNo ratings yet
- Experiment 1 WLF Water Flow MeasurementDocument4 pagesExperiment 1 WLF Water Flow MeasurementYi Ling GohNo ratings yet
- 13 Types of Consumer Personalities AdvertisementsDocument30 pages13 Types of Consumer Personalities AdvertisementsChi Xuan KanNo ratings yet
- Chapter 2a Online Activity and QuizDocument2 pagesChapter 2a Online Activity and QuizAziz FathNo ratings yet
- HEAT PUMP EXPERIMENT RESULTSDocument11 pagesHEAT PUMP EXPERIMENT RESULTSNur AdlinaNo ratings yet
- Human Reflexes and Senses Lab ReportDocument15 pagesHuman Reflexes and Senses Lab ReportAin SufizaNo ratings yet
- Angular Position (FULL REPORT)Document19 pagesAngular Position (FULL REPORT)Farid AsyrafNo ratings yet
- CHM260 FTIR tutorial questionsDocument4 pagesCHM260 FTIR tutorial questionsadlina asnawiNo ratings yet
- Lab Report Experiment 2Document13 pagesLab Report Experiment 2nadia athiraNo ratings yet
- Iot Based Transformer Monitoring System.Document82 pagesIot Based Transformer Monitoring System.ra patNo ratings yet
- Lab-2 TrussDocument4 pagesLab-2 TrussBrian WongNo ratings yet
- Full Report Control EngineeringDocument14 pagesFull Report Control EngineeringJoshua ReynoldsNo ratings yet
- Francis TurbineDocument8 pagesFrancis TurbineMohamad HamimyuddinNo ratings yet
- JJ311 MECHANICAL OF MACHINE CH 2 Simple Harmonic MotionDocument38 pagesJJ311 MECHANICAL OF MACHINE CH 2 Simple Harmonic MotionAh Tiang100% (3)
- Basic Control Systems LabDocument10 pagesBasic Control Systems LabNut PamornNo ratings yet
- AEROSPACE LAB EXPERIMENT ON SERVO CONTROLDocument24 pagesAEROSPACE LAB EXPERIMENT ON SERVO CONTROLhishamwahidinNo ratings yet
- Lab 05 (Servo)Document4 pagesLab 05 (Servo)hitesh89No ratings yet
- Cover Letter Noriza ABBDocument2 pagesCover Letter Noriza ABBizamaiyusNo ratings yet
- Hydrocarbon Questions For IGCSEDocument6 pagesHydrocarbon Questions For IGCSEizamaiyusNo ratings yet
- MPMSAA Rainwater Tank Design and Installation Handbook 2008Document111 pagesMPMSAA Rainwater Tank Design and Installation Handbook 2008izamaiyusNo ratings yet
- Preserving Environmental BalanceDocument16 pagesPreserving Environmental BalanceizamaiyusNo ratings yet
- Hydrocarbon Questions For IGCSEDocument6 pagesHydrocarbon Questions For IGCSEizamaiyusNo ratings yet
- Progression and SeriesDocument14 pagesProgression and Serieslucifer_ayanNo ratings yet
- Hydraulic flow design battery inert gas fire suppression componentsDocument7 pagesHydraulic flow design battery inert gas fire suppression componentsizamaiyusNo ratings yet
- Organic ChemistryDocument33 pagesOrganic ChemistryizamaiyusNo ratings yet
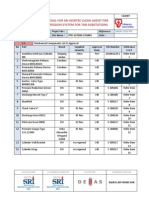
- SEVO Novec 1230 Clean Agent Fire System ProposalDocument2 pagesSEVO Novec 1230 Clean Agent Fire System ProposalizamaiyusNo ratings yet
- Certificate Design AnalysisDocument8 pagesCertificate Design AnalysisizamaiyusNo ratings yet
- SRI Clean Agent Fire SystemDocument17 pagesSRI Clean Agent Fire SystemizamaiyusNo ratings yet
- Fire-Fighting Guidance Notes - E-Feb15Document161 pagesFire-Fighting Guidance Notes - E-Feb15Moe LattNo ratings yet
- Lecture 6 - IRRDocument24 pagesLecture 6 - IRRizamaiyusNo ratings yet
- TesiDocument19 pagesTesiizamaiyusNo ratings yet
- Factors Affecting Design and Documentation QualityDocument15 pagesFactors Affecting Design and Documentation QualityAristotle RiveraNo ratings yet
- Lecture 6 - IRRDocument24 pagesLecture 6 - IRRizamaiyusNo ratings yet
- Generation InvestmentsDocument21 pagesGeneration InvestmentsizamaiyusNo ratings yet
- Fiber-based Mach-Zehnder interferometric structures for efficient modulation format conversionDocument9 pagesFiber-based Mach-Zehnder interferometric structures for efficient modulation format conversionizamaiyusNo ratings yet
- Power System OtherDocument63 pagesPower System OtherizamaiyusNo ratings yet
- Wireless Power TransmissionDocument4 pagesWireless Power Transmissionnagaraju0204No ratings yet
- Cover Letter Internship EflagDocument1 pageCover Letter Internship EflagizamaiyusNo ratings yet
- Hitepaper - PDF Transmission - PDF: Wireless Power Supply Sources of ReferencesDocument1 pageHitepaper - PDF Transmission - PDF: Wireless Power Supply Sources of ReferencesizamaiyusNo ratings yet
- Cover Letter Sales CoordinatorDocument1 pageCover Letter Sales CoordinatorizamaiyusNo ratings yet
- Circuit Breaker SF6Document17 pagesCircuit Breaker SF6izamaiyusNo ratings yet
- Cover Letter Internship EflagDocument1 pageCover Letter Internship EflagizamaiyusNo ratings yet
- Sample Cover LetterDocument1 pageSample Cover LetterizamaiyusNo ratings yet
- Townsend Theory On Breakdown 2012 11 2Document1 pageTownsend Theory On Breakdown 2012 11 2izamaiyusNo ratings yet
- Internship ResumeDocument1 pageInternship ResumeRajendra PrasadNo ratings yet
- Cover Letter Data ServiceDocument1 pageCover Letter Data ServiceizamaiyusNo ratings yet
- E PM 100Document29 pagesE PM 100masoudNo ratings yet
- Hajar Trading and Technical Services: Risk AssessmentDocument10 pagesHajar Trading and Technical Services: Risk Assessmentwinston11No ratings yet
- Waste Water-Sewage PumpDocument111 pagesWaste Water-Sewage Pumpcharadeg100No ratings yet
- Bomba Electrica 1500gpm 300HP (Medidas)Document1 pageBomba Electrica 1500gpm 300HP (Medidas)Fire ChileNo ratings yet
- WM2077CW Service ManualDocument44 pagesWM2077CW Service ManualMichael David SharkeyNo ratings yet
- 200VLD-H SS No EconomizerDocument2 pages200VLD-H SS No EconomizerAnas ElwakilNo ratings yet
- Specialist Water Supply Systems PP-R pipe system Ensure reliabilityDocument16 pagesSpecialist Water Supply Systems PP-R pipe system Ensure reliabilitymabj68No ratings yet
- Symmetry & Crystal StructuresDocument37 pagesSymmetry & Crystal StructuresNurnajihah Sukimi JiehaNo ratings yet
- ChE 525: Physical & Chemical Principles Mock Board 3Document6 pagesChE 525: Physical & Chemical Principles Mock Board 3Kuo Garol SarongNo ratings yet
- Overhead Phil MC KeownDocument30 pagesOverhead Phil MC KeownAditya AoleNo ratings yet
- Boundary Layer ThicknessDocument23 pagesBoundary Layer ThicknessPridhar ThiagarajanNo ratings yet
- Flux and Refining Agent InjectionDocument1 pageFlux and Refining Agent InjectionСтанислав ПодольскийNo ratings yet
- SIA Guidance Note 47Document11 pagesSIA Guidance Note 47Ali BiomyNo ratings yet
- Proposed Rule: Airworthiness Directives: Cubcrafters, Inc., Model PC18&ndash 160Document2 pagesProposed Rule: Airworthiness Directives: Cubcrafters, Inc., Model PC18&ndash 160Justia.comNo ratings yet
- 6ra 2620 6d v57 1a Z Simoreg d38035 Siemens Manual 02Document18 pages6ra 2620 6d v57 1a Z Simoreg d38035 Siemens Manual 02Stefan IstratescuNo ratings yet
- PG Parts Catalog1Document179 pagesPG Parts Catalog1Olivier ORMANNo ratings yet
- Ptmail - m1021 - Ss - Ev Ultimate Market Intelligence ReportDocument23 pagesPtmail - m1021 - Ss - Ev Ultimate Market Intelligence ReportPIYUSH GOPALNo ratings yet
- Voith Thyricon Excitation SystemDocument8 pagesVoith Thyricon Excitation SystemKeshab ShresthaNo ratings yet
- Fallout 1 ManualDocument124 pagesFallout 1 ManualDave100% (1)
- The Oil Kings Cooper en 15522 - PDFDocument5 pagesThe Oil Kings Cooper en 15522 - PDFNan EatonNo ratings yet
- Introduction to Distillation and Flash DistillationDocument19 pagesIntroduction to Distillation and Flash DistillationSalman HaniffaNo ratings yet
- Fluid Flow Applications: SolutionDocument6 pagesFluid Flow Applications: Solutionmanikandaprabhu.rk14No ratings yet
- Caterpillar Product Line 13Document7 pagesCaterpillar Product Line 13GenneraalNo ratings yet
- New Holland Engine F4ge Backhoe en Service ManualDocument10 pagesNew Holland Engine F4ge Backhoe en Service Manualenrique100% (47)
- With Refanned Jt8D Engines: CR-1348s Report Mdcj4519Document238 pagesWith Refanned Jt8D Engines: CR-1348s Report Mdcj4519FernandoNo ratings yet
- Transfer Switching Equipment 100, 200, 260, 400A: Instr Uction ManualDocument32 pagesTransfer Switching Equipment 100, 200, 260, 400A: Instr Uction ManualMesseňger HệŢhốngNo ratings yet
- SUPER PPTPPTDocument15 pagesSUPER PPTPPTsrinuNo ratings yet
- 568100Document2 pages568100Talha TariqNo ratings yet
- MT Lab Final RecordDocument85 pagesMT Lab Final RecordPRABATH MADHAVANNo ratings yet
- Sub Sea Hot Stab (Sub Sea High Pressure Quick Disconnect)Document2 pagesSub Sea Hot Stab (Sub Sea High Pressure Quick Disconnect)estelauNo ratings yet
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 5 out of 5 stars5/5 (2)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenFrom EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo ratings yet
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceFrom EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo ratings yet
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusFrom EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusRating: 4.5 out of 5 stars4.5/5 (2)
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Math Magic: How To Master Everyday Math ProblemsFrom EverandMath Magic: How To Master Everyday Math ProblemsRating: 3.5 out of 5 stars3.5/5 (15)
- Psychology Behind Mathematics - The Comprehensive GuideFrom EverandPsychology Behind Mathematics - The Comprehensive GuideNo ratings yet
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 4.5 out of 5 stars4.5/5 (20)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)