You might also like
- CAD Computer Applications Design Question BankDocument7 pagesCAD Computer Applications Design Question Bankmskumar_5540% (1)
- Cam Lab 1Document40 pagesCam Lab 1Madhusudhan Rao KNo ratings yet
- CAPP Explained: Computer Aided Process PlanningDocument32 pagesCAPP Explained: Computer Aided Process PlanningMuizzuddin Rosli100% (1)
- CadcamqbDocument6 pagesCadcamqbMukesh KumarNo ratings yet
- Ch-11 NC CNC DNC FMS Automation and RoboticsDocument191 pagesCh-11 NC CNC DNC FMS Automation and RoboticsPrateek BayalNo ratings yet
- METHOD STUDY FOR COST REDUCTIONDocument68 pagesMETHOD STUDY FOR COST REDUCTIONzakirno19248No ratings yet
- Interdisciplinary Concepts in Civil and Mechanical EngineeringDocument8 pagesInterdisciplinary Concepts in Civil and Mechanical EngineeringNarayanan SubramanianNo ratings yet
- CAD/CAM - Objective Questions - Unit2Document2 pagesCAD/CAM - Objective Questions - Unit2Anonymous YkDJkSqNo ratings yet
- Cad Cam3 Unit NeelimaDocument96 pagesCad Cam3 Unit Neelimasatish86No ratings yet
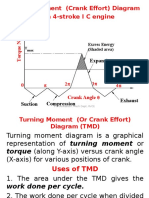
- Turning Moment Diagram & FlywheelDocument88 pagesTurning Moment Diagram & FlywheelAshishAgarwal100% (1)
- Manufacturing Processes - Iiprof. A.b.chattopadhyay, Prof. A.K. ChattopadhyayDocument618 pagesManufacturing Processes - Iiprof. A.b.chattopadhyay, Prof. A.K. ChattopadhyayVivek Jaiswal88% (8)
- 2017HT30004 - Mechanical System Design - Assignment 2Document15 pages2017HT30004 - Mechanical System Design - Assignment 2Partha Pratim SarkarNo ratings yet
- Additive Manufacturing Exam Questions on Processes, Applications and TechnologiesDocument4 pagesAdditive Manufacturing Exam Questions on Processes, Applications and TechnologiesrajuNo ratings yet
- ALL CNC Printouts PROGRAMS PRINTOUTDocument26 pagesALL CNC Printouts PROGRAMS PRINTOUTGajananNo ratings yet
- CIM-2 MarksDocument18 pagesCIM-2 MarksHod MechNo ratings yet
- Guia Igbt Toshiba 2011Document16 pagesGuia Igbt Toshiba 2011Francisco Orozco100% (1)
- Design of Transmission SystemsDocument5 pagesDesign of Transmission SystemsViswanathan KrishNo ratings yet
- PPC Lesson PlanDocument2 pagesPPC Lesson PlanSathiya MoorthyNo ratings yet
- ME8793 Process Planning Cost Estimation 5Document35 pagesME8793 Process Planning Cost Estimation 5Vikashini GNo ratings yet
- Numerical Control and Industrial Robotics: Review QuestionsDocument9 pagesNumerical Control and Industrial Robotics: Review QuestionsDavid GonzalezNo ratings yet
- Industrial Work Group Cellular ManufacturingDocument42 pagesIndustrial Work Group Cellular ManufacturingLungile NyangaNo ratings yet
- CAD-CAM Power Point PresentationDocument102 pagesCAD-CAM Power Point PresentationArgAshishGargNo ratings yet
- E Books Branchwise - 1Document1,240 pagesE Books Branchwise - 1Mahesh Ramteke100% (1)
- ME83691-Computer Aided Design and ManufacturingDocument15 pagesME83691-Computer Aided Design and Manufacturingraman thiru55No ratings yet
- Design of A 3D Printed OrnithopterDocument4 pagesDesign of A 3D Printed OrnithopterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Unit-2-Computer Aided DesignDocument42 pagesUnit-2-Computer Aided DesignMuthuvel M80% (5)
- 19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraDocument49 pages19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraTizon Star100% (1)
- Numerical Control of Machine Tools PDFDocument2 pagesNumerical Control of Machine Tools PDFBruce MartinNo ratings yet
- Industrial Robotics and Expert Systems Question Paper 2012Document2 pagesIndustrial Robotics and Expert Systems Question Paper 2012siraj0% (1)
- 012 APT Macro STDocument10 pages012 APT Macro STAladdin AdelNo ratings yet
- Soft Copy Output DevicesDocument2 pagesSoft Copy Output DevicesJrBouXky75% (4)
- Agni College of Technology: Office of Examcell Model ExamDocument3 pagesAgni College of Technology: Office of Examcell Model ExamohmshankarNo ratings yet
- Cad Cam and AutomationDocument21 pagesCad Cam and AutomationSumit KumarNo ratings yet
- Important Questions and Answers - Robot Drive Systems and End Effectors PDFDocument5 pagesImportant Questions and Answers - Robot Drive Systems and End Effectors PDFvicky tNo ratings yet
- CAD Using CatiaDocument3 pagesCAD Using CatiakarthipriyaNo ratings yet
- Unconventional Machining ProcessesDocument2 pagesUnconventional Machining ProcessesP.N. MohankumarNo ratings yet
- DMS QB 2015 RDocument8 pagesDMS QB 2015 RKeerthe VaasanNo ratings yet
- Assignments Machine Tool DesignDocument7 pagesAssignments Machine Tool Designabdullah 3mar abou reashaNo ratings yet
- Government Tool Room and Training CentreDocument24 pagesGovernment Tool Room and Training CentrePuneeth SuNo ratings yet
- Robotics (17ME2504A) Unit IV Manipulator KinematicsDocument32 pagesRobotics (17ME2504A) Unit IV Manipulator KinematicsNani PusuluriNo ratings yet
- SeminarDocument29 pagesSeminarMohan UrsNo ratings yet
- Simulation Lab ManualDocument60 pagesSimulation Lab Manualvensesfrank100% (1)
- Unit 4 CADDocument45 pagesUnit 4 CADiampiyushsahuNo ratings yet
- Cadcam Geometric ModelingDocument31 pagesCadcam Geometric ModelingPankaj ChhabraNo ratings yet
- BASIC DIFFERENCES BETWEEN COUPLINGS, CLUTCHES AND BRAKESDocument41 pagesBASIC DIFFERENCES BETWEEN COUPLINGS, CLUTCHES AND BRAKESKadiyam VijayNo ratings yet
- Part Programming For CNC MachinesDocument36 pagesPart Programming For CNC MachinesMuthuvel M100% (2)
- 2008 BevanphdDocument194 pages2008 Bevanphdrajm100% (1)
- Short Question Bank CADDocument3 pagesShort Question Bank CADnravin5No ratings yet
- IE368 Facilties Layout and Material Handling PDFDocument2 pagesIE368 Facilties Layout and Material Handling PDFloshidhNo ratings yet
- Computer Assisted Part Programming (APT, Automatically Programmed Tool)Document40 pagesComputer Assisted Part Programming (APT, Automatically Programmed Tool)kumareshNo ratings yet
- APT Programming for Numerical ControlDocument43 pagesAPT Programming for Numerical ControlPromit ChoudhuryNo ratings yet
- Chapter 3 - NC ProgrammingDocument12 pagesChapter 3 - NC ProgrammingnidhidarklordNo ratings yet
- AptDocument86 pagesAptSreehari ViswanathanNo ratings yet
- APT computer aided part programming languageDocument19 pagesAPT computer aided part programming languagePiyush Aggarwal100% (4)
- 13128466-١Document20 pages13128466-١Medo AnaNo ratings yet
- Fallsem2016-17 - Mee307 - Eth - 2506 - 22-Sep-2016 - RM001 - 13 AptDocument30 pagesFallsem2016-17 - Mee307 - Eth - 2506 - 22-Sep-2016 - RM001 - 13 AptDeepak Dileep100% (1)
- APT LanguageDocument69 pagesAPT LanguageSanapathi Prasad100% (1)
- Ch4capp AptDocument28 pagesCh4capp AptRajesh VermaNo ratings yet
- Chapter 3 p71-74Document4 pagesChapter 3 p71-74FaisalNo ratings yet
- Computer Assisted Part ProgrammingDocument21 pagesComputer Assisted Part ProgrammingSanthan SalaiNo ratings yet
- MD Anderson Plate and Frame Heat Exchangers ProjectDocument7 pagesMD Anderson Plate and Frame Heat Exchangers ProjectHoucem Eddine MechriNo ratings yet
- Study On Heat Transfer Area of A Plate-Fin Heat Exchanger With Wavy SurfacesDocument15 pagesStudy On Heat Transfer Area of A Plate-Fin Heat Exchanger With Wavy SurfacesJignesh RohitNo ratings yet
- Exhaust Gas Recirculation ReportDocument21 pagesExhaust Gas Recirculation ReportJignesh Rohit100% (2)
- IJEETC 54d349d3b48f4Document13 pagesIJEETC 54d349d3b48f4Jignesh RohitNo ratings yet
- Acc. No. DC 1258Document100 pagesAcc. No. DC 1258Jignesh RohitNo ratings yet
- Lecture10 HeatExchangersDocument27 pagesLecture10 HeatExchangersJignesh RohitNo ratings yet
- Fluent Evaporation & CondensationDocument27 pagesFluent Evaporation & CondensationTooba GhouriNo ratings yet
- APT COMPUTER AIDED PART PROGRAMMINGDocument45 pagesAPT COMPUTER AIDED PART PROGRAMMINGJignesh Rohit0% (1)
- Flexible Manufacturing System (FMS)Document96 pagesFlexible Manufacturing System (FMS)Jignesh RohitNo ratings yet
- BTech ME Final PDFDocument36 pagesBTech ME Final PDFJignesh RohitNo ratings yet
- BTech ME Final PDFDocument36 pagesBTech ME Final PDFJignesh RohitNo ratings yet
- Hydraulics & Pneumatic Systems DepartmentDocument168 pagesHydraulics & Pneumatic Systems DepartmentVolety_Sarma_1703No ratings yet
- PLCDocument28 pagesPLCzenrajaNo ratings yet
- Flexible Manufacturing System (FMS)Document96 pagesFlexible Manufacturing System (FMS)Jignesh RohitNo ratings yet
- BTech ME Final PDFDocument36 pagesBTech ME Final PDFJignesh RohitNo ratings yet
- BTech ME Final PDFDocument36 pagesBTech ME Final PDFJignesh RohitNo ratings yet
- BTech ME Final PDFDocument36 pagesBTech ME Final PDFJignesh RohitNo ratings yet
- BTech ME Final PDFDocument36 pagesBTech ME Final PDFJignesh RohitNo ratings yet
- Revised Draft STR SBC 184 Dated 6 Dec 2018Document17 pagesRevised Draft STR SBC 184 Dated 6 Dec 2018SSE E P TRLNo ratings yet
- CNC Lathe Unser ManualDocument114 pagesCNC Lathe Unser ManualTun Min NaingNo ratings yet
- GAUGING SYSTEMS INSTRUCTION MANUALDocument440 pagesGAUGING SYSTEMS INSTRUCTION MANUALMonika MałysNo ratings yet
- Cad Cam HandoutDocument2 pagesCad Cam HandoutDinesh KilladaNo ratings yet
- Feasibillity Study of Semi Automatic Pipe Handling - Great ArticleDocument97 pagesFeasibillity Study of Semi Automatic Pipe Handling - Great ArticleTom ZimmerNo ratings yet
- Calmotion Usb CNCDocument17 pagesCalmotion Usb CNCErnesto ChavezNo ratings yet
- Literature Review of CNC MachineDocument7 pagesLiterature Review of CNC Machinec5kgkdd4100% (1)
- Machine Tools Guide: Turning, Milling, Drilling & More Machine Processes ExplainedDocument5 pagesMachine Tools Guide: Turning, Milling, Drilling & More Machine Processes ExplainedJUAN CAMILO BRIEZ MONTEALEGRENo ratings yet
- CNC 2Document4 pagesCNC 2Claudiu RotariuNo ratings yet
- Control HNC MANUAL DE PROGRAMACIONDocument144 pagesControl HNC MANUAL DE PROGRAMACIONSaul Fernando Cujaban AceroNo ratings yet
- Power Motion: CNC + PLC Technology For High-Performance Motion ApplicationsDocument9 pagesPower Motion: CNC + PLC Technology For High-Performance Motion ApplicationsWazabi MooNo ratings yet
- A20 PDFDocument8 pagesA20 PDFGuillermo Ramirez100% (2)
- f1 NC CNC DNCDocument57 pagesf1 NC CNC DNCarunNo ratings yet
- MazakDocument614 pagesMazakphuongdx86% (7)
- E200P Operation ManualDocument26 pagesE200P Operation ManualsharmasourabhNo ratings yet
- CNC Machine Black BookDocument87 pagesCNC Machine Black BookVaishnavi BhoreNo ratings yet
- Bo Dieu Khien F2100, F2300 PDFDocument156 pagesBo Dieu Khien F2100, F2300 PDFlinh kiện cncvietproNo ratings yet
- Manual (150im II)Document222 pagesManual (150im II)Ricardo CalvoNo ratings yet
- Industrial RobotsDocument15 pagesIndustrial RobotsLW LuWee ChongNo ratings yet
- CNC MachineDocument16 pagesCNC MachineSwayan Prakash KhuntiaNo ratings yet
- Operations Management (OPM530) - C13 Technology ManagementDocument38 pagesOperations Management (OPM530) - C13 Technology Managementazwan ayopNo ratings yet
- CNC ProgDocument38 pagesCNC ProgPoornima JoshiNo ratings yet
- Block Making Machine Compacta by PrensolandDocument31 pagesBlock Making Machine Compacta by PrensolandprensolandNo ratings yet
- Flexible Manufacturing SystemDocument45 pagesFlexible Manufacturing Systemmrblue_ksaNo ratings yet
- ME2309 CAD CAM Lab Manual PDFDocument39 pagesME2309 CAD CAM Lab Manual PDFAnonymous bj8F8c100% (1)
- G and M Codes For CNC LatheDocument8 pagesG and M Codes For CNC LatheLuis Gonzalo Castañeda GalindoNo ratings yet
- Pressure Seal Bolted Bonnet Valves (Velan) PDFDocument56 pagesPressure Seal Bolted Bonnet Valves (Velan) PDFUtku KepcenNo ratings yet
- CNC Machine G and M Codes GuideDocument2 pagesCNC Machine G and M Codes GuideswapnilNo ratings yet
- B-75114en 04Document210 pagesB-75114en 04akshay pawarNo ratings yet
- TP Brochure ScreenDocument16 pagesTP Brochure Screenn.gawasNo ratings yet