You might also like
- Endulzamiento Del Gas Natural.Document24 pagesEndulzamiento Del Gas Natural.Francisco RuedaNo ratings yet
- Referencia ComercialDocument6 pagesReferencia ComercialToni Jbl0% (1)
- Unidad IV. Intercambiadores de CalorDocument69 pagesUnidad IV. Intercambiadores de CalormahuligNo ratings yet
- Diseño de EquiposDocument28 pagesDiseño de EquiposFrancisco RuedaNo ratings yet
- Conceptos Basicos de QuímicaDocument12 pagesConceptos Basicos de QuímicaIzaskun Uzcanga MeabeNo ratings yet
- Ley CarrosDocument11 pagesLey CarrosJose SanchezNo ratings yet
- Biologia 06 GENETICA Y METABOLISMO CELULARDocument3 pagesBiologia 06 GENETICA Y METABOLISMO CELULARLeidy Cachique ShupingahuaNo ratings yet
- Ensayo Importancia de La Comunicación Asertiva en Una OrganizaciónDocument8 pagesEnsayo Importancia de La Comunicación Asertiva en Una OrganizaciónMaleja martinez50% (4)
- Practica 3Document4 pagesPractica 3Barly Eduardo Espinal OvalleNo ratings yet
- Diferencia Entre Un Contrato Individual de Trabajo y Un Contrato de Servicios ProfesionalesDocument4 pagesDiferencia Entre Un Contrato Individual de Trabajo y Un Contrato de Servicios ProfesionalesAlejandra JZ100% (2)
- Costos de La Calidad TotalDocument9 pagesCostos de La Calidad TotalDORALBISNo ratings yet
- Ergonomía Preventiva y CorrectivaDocument2 pagesErgonomía Preventiva y CorrectivaHany86% (14)
- Auto Que Saca Los Bienes A RemateDocument1 pageAuto Que Saca Los Bienes A RemateLicArzateNo ratings yet
- Glosario de términos contables en inglésDocument3 pagesGlosario de términos contables en inglésSoyUnHamsterNo ratings yet
- Tra MoyaDocument11 pagesTra MoyaAugusto VeneroNo ratings yet
- ActivoFijo2013 PDFDocument279 pagesActivoFijo2013 PDFEdmundo R. Neria0% (1)
- Catalogo Magvidesign IiiDocument4 pagesCatalogo Magvidesign IiiDarwin AriasNo ratings yet
- Caso JamestownDocument19 pagesCaso JamestownJeff Nuñez0% (1)
- Diagnóstico de la metodología de gestión de proyectos en el área de proyectos de BancamiaDocument13 pagesDiagnóstico de la metodología de gestión de proyectos en el área de proyectos de BancamiaMiguel Angel CruzNo ratings yet
- Análisis de Coyuntura Tema 2 ProyectoDocument7 pagesAnálisis de Coyuntura Tema 2 Proyectoneribeth perezNo ratings yet
- Catalogo Retroexcavadora Retropala 422e Caterpillar PDFDocument20 pagesCatalogo Retroexcavadora Retropala 422e Caterpillar PDFJoel100% (1)
- Cap 3 Capital Social y Capital ContableDocument21 pagesCap 3 Capital Social y Capital ContableveroNo ratings yet
- Rodrigo Pérez Tarea 3 Renta ImponibleDocument4 pagesRodrigo Pérez Tarea 3 Renta ImponiblePatricio EscobarNo ratings yet
- Rampas, Uniones Fijas y Desmontables y Tensores 11-1Document4 pagesRampas, Uniones Fijas y Desmontables y Tensores 11-1evelynNo ratings yet
- Ejercicios Propuestos Interes SimpleDocument2 pagesEjercicios Propuestos Interes SimpleJason Jonathan Guzmán LazoNo ratings yet
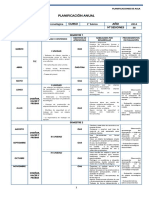
- Planificación anual de Educación Tecnológica 1° básicoDocument43 pagesPlanificación anual de Educación Tecnológica 1° básicoNataliaMackarenaVeraFuentes100% (2)
- Especificaciones - 2023 Polaris RANGER XP 1000 Premium Super Graphite Con Acentos de Cal LevantadaDocument2 pagesEspecificaciones - 2023 Polaris RANGER XP 1000 Premium Super Graphite Con Acentos de Cal Levantadajulian andres ramos ramirezNo ratings yet
- Corredor de ValoresDocument2 pagesCorredor de ValoresDavid AmadorNo ratings yet
- Manual de Estudio para La Certificación Como Asesor PrevisionalDocument1 pageManual de Estudio para La Certificación Como Asesor Previsionalchancarloshumberto31No ratings yet
- Curso de Reparacion de CelularesDocument112 pagesCurso de Reparacion de CelularesRodolfo Contreras0% (1)
- Factoring y LeasingDocument18 pagesFactoring y LeasingLuis Kleyver Coveñas VilchezNo ratings yet
- ContratoDocument2 pagesContratoDANIELA ALEJANDRA CABRERA CASTILLONo ratings yet
- El Periodico Mural - ImpresoDocument2 pagesEl Periodico Mural - ImpresoGladys Marleny Alva LeonNo ratings yet
- Fundamentos de Ingeniería de ServiciosDocument55 pagesFundamentos de Ingeniería de ServiciosEduardo Guzman100% (1)
- Trazabilidad del caféDocument14 pagesTrazabilidad del caféJoan Sebastian Arbelaez CaroNo ratings yet
- Base de DatosDocument23 pagesBase de DatosAlfredoNo ratings yet