You might also like
- Feedback Control Theory: A Computer System's PerspectiveDocument52 pagesFeedback Control Theory: A Computer System's PerspectiveAlberto Garcia CarrilloNo ratings yet
- Chapter 4Document17 pagesChapter 4CarlosCD17No ratings yet
- CONTROL SYSTEMS: MINIMIZING ERRORSDocument11 pagesCONTROL SYSTEMS: MINIMIZING ERRORScapturemrahNo ratings yet
- Chapter 2 - Reduction of Multiple SystemDocument46 pagesChapter 2 - Reduction of Multiple SystemHaqeemee HusseinNo ratings yet
- Digital Control Tutorial Transfer FunctionsDocument10 pagesDigital Control Tutorial Transfer FunctionsMary DunhamNo ratings yet
- B - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemDocument21 pagesB - Lecture3 The Transfer Function and Block Diagram Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- Objectives: Chapter 4: Feedback Control System CharacteristicsDocument17 pagesObjectives: Chapter 4: Feedback Control System CharacteristicsNikhil V NainoorNo ratings yet
- Control Theory 11Document50 pagesControl Theory 11faestningNo ratings yet
- Block Diagram Reduction TechniqueDocument28 pagesBlock Diagram Reduction TechniquePalak JadwaniNo ratings yet
- Using MATLAB and Simulink ForDocument22 pagesUsing MATLAB and Simulink ForJojo KawayNo ratings yet
- Control Systems KuestionDocument39 pagesControl Systems KuestionRose KayoNo ratings yet
- Exam 1Document61 pagesExam 1Sara M. DheyabNo ratings yet
- Block Diagrams Control SystemsDocument25 pagesBlock Diagrams Control SystemsSingappuliNo ratings yet
- Syafruddin Hasan: Contact No.: 0823 6487 9588 E-Mail: Syafruddin7@usu - Ac.idDocument34 pagesSyafruddin Hasan: Contact No.: 0823 6487 9588 E-Mail: Syafruddin7@usu - Ac.idAyu Kartika ManikNo ratings yet
- Block Diagrams & Signal Flow Graphs Lectures 5 & 6: M.R. Azimi, ProfessorDocument21 pagesBlock Diagrams & Signal Flow Graphs Lectures 5 & 6: M.R. Azimi, ProfessorFreedom YenesewNo ratings yet
- Block Diagrams & Signal Flow Graphs Lectures 5 & 6: M.R. Azimi, ProfessorDocument21 pagesBlock Diagrams & Signal Flow Graphs Lectures 5 & 6: M.R. Azimi, ProfessorNDA BandNo ratings yet
- Block Diagrams & Signal Flow Graphs Lectures 5 & 6: M.R. Azimi, ProfessorDocument21 pagesBlock Diagrams & Signal Flow Graphs Lectures 5 & 6: M.R. Azimi, ProfessorNDA BandNo ratings yet
- Matlab Simulink For Control082pDocument39 pagesMatlab Simulink For Control082pWills TtaccaNo ratings yet
- Chapter 4 Block Diagrams of Control SystemsDocument18 pagesChapter 4 Block Diagrams of Control SystemsZeynal Abidin ŞabaşNo ratings yet
- 7 Fungsi TransferDocument13 pages7 Fungsi TransferQoryNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument20 pagesController Design Based On Transient Response CriteriaGapuk MaboekNo ratings yet
- Control Systems Systems and Their Representations Unit-1: Ms. P. Geethanjali Asst. Professor (SR) SelectDocument72 pagesControl Systems Systems and Their Representations Unit-1: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriNo ratings yet
- Control System LabDocument10 pagesControl System LabRalphNo ratings yet
- Nyquist Bode Root Locus MATLABDocument7 pagesNyquist Bode Root Locus MATLABAnirudh MittalNo ratings yet
- Session 6Document13 pagesSession 6mohammedNo ratings yet
- EE351Chap3-2.0 - Transfer FTN & SFGsDocument19 pagesEE351Chap3-2.0 - Transfer FTN & SFGsSardar Hamid ullahNo ratings yet
- Frequency Response Analysis Explained for Process Control EngineersDocument33 pagesFrequency Response Analysis Explained for Process Control EngineersShiraz HusainNo ratings yet
- Module 2: Modeling Discrete Time Systems by Pulse Transfer FunctionDocument4 pagesModule 2: Modeling Discrete Time Systems by Pulse Transfer FunctionamritNo ratings yet
- Control System Tutorial 1Document4 pagesControl System Tutorial 1sreekanthaNo ratings yet
- AME 455 Control Systems DesignDocument12 pagesAME 455 Control Systems DesignJason ChiangNo ratings yet
- 08 Models APDocument31 pages08 Models APLucio Portuguez AlmanzaNo ratings yet
- Lab2 Control SystemDocument43 pagesLab2 Control Systemعبدالملك جمالNo ratings yet
- MATLAB Control System Modelling and AnalysisDocument45 pagesMATLAB Control System Modelling and AnalysisJagabandhu KarNo ratings yet
- 3723 Lecture 18Document41 pages3723 Lecture 18Reddy BabuNo ratings yet
- Online Control Lecture #2Document33 pagesOnline Control Lecture #2Noor GamingNo ratings yet
- Engineering Systems Models and Transfer FunctionsDocument25 pagesEngineering Systems Models and Transfer FunctionsLunaWildmannNo ratings yet
- CSD - Classical PID ControlDocument22 pagesCSD - Classical PID ControlPatricio De la ONo ratings yet
- Problems with Analog Systems and SamplingDocument2 pagesProblems with Analog Systems and SamplingEduardo Rios VazquezNo ratings yet
- CW Digital Control-2Document17 pagesCW Digital Control-2Hasnain KazmiNo ratings yet
- Handout Matlab Lect4Document6 pagesHandout Matlab Lect4Niraj PSNo ratings yet
- Laboratory in Automatic Control Lab6Document14 pagesLaboratory in Automatic Control Lab6nchubcclNo ratings yet
- Lab3 Lcs 09032023 100213amDocument31 pagesLab3 Lcs 09032023 100213amMaryam anjumNo ratings yet
- Control Lab Project 783 790 806Document14 pagesControl Lab Project 783 790 806Abid KhattakNo ratings yet
- Control 12Document12 pagesControl 12Hashim AshaariNo ratings yet
- Controls Systems ExamplesDocument67 pagesControls Systems ExamplesUpender Rao SunkishalaNo ratings yet
- Lecture 2 IIIDocument11 pagesLecture 2 IIIgks5kc8bhdNo ratings yet
- Chapter 3Document37 pagesChapter 3Izzat AiresNo ratings yet
- Control SystemDocument8 pagesControl SystemSabyasachi SamalNo ratings yet
- Chapter - 5 - The Performance of Feedback Control Systems - W2015Document91 pagesChapter - 5 - The Performance of Feedback Control Systems - W2015120200421003nNo ratings yet
- Experiment No.1 Time Response of First Order System: 1.matlab ProgramDocument5 pagesExperiment No.1 Time Response of First Order System: 1.matlab ProgramDarshan DeepuNo ratings yet
- Control System Engineering EC3301 Assignment I: Practice Following ProblemsDocument2 pagesControl System Engineering EC3301 Assignment I: Practice Following ProblemsAparajita PanigrahiNo ratings yet
- Transfer Function (Control Engg)Document18 pagesTransfer Function (Control Engg)patel_vicky87100% (1)
- Class 4 Introduction To Transfer Functions, Transfer Function Models.Document27 pagesClass 4 Introduction To Transfer Functions, Transfer Function Models.Acharya Mascara PlaudoNo ratings yet
- ME 325 ControlSystems Lecture 2 2023 PDFDocument12 pagesME 325 ControlSystems Lecture 2 2023 PDFNissy ChinthapalliNo ratings yet
- Control System Performance PDFDocument18 pagesControl System Performance PDFChibueze EzeokaforNo ratings yet
- Feedback Control Performance MeasuresDocument37 pagesFeedback Control Performance MeasuresmrkmatNo ratings yet
- Combinatorial Algorithms: For Computers and CalculatorsFrom EverandCombinatorial Algorithms: For Computers and CalculatorsRating: 4 out of 5 stars4/5 (2)
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Transient Response Specifications of Second-Order SystemsDocument13 pagesTransient Response Specifications of Second-Order SystemsMamdouhAlhanafyNo ratings yet
- Lecture 8Document9 pagesLecture 8MamdouhAlhanafyNo ratings yet
- State Space Models: Lecture 6 & 7Document6 pagesState Space Models: Lecture 6 & 7MamdouhAlhanafyNo ratings yet
- Rotating Equipment Chapter 3 PumpsDocument125 pagesRotating Equipment Chapter 3 PumpsMamdouhAlhanafy100% (3)
- 4 CouplingsDocument28 pages4 CouplingsMamdouhAlhanafyNo ratings yet
- Laplace Transform for Solving Linear ODEsDocument8 pagesLaplace Transform for Solving Linear ODEsMamdouhAlhanafyNo ratings yet
- Lecture 1Document16 pagesLecture 1MamdouhAlhanafyNo ratings yet
- Pumps: Types, Working Mechanism, and Performance FactorsDocument7 pagesPumps: Types, Working Mechanism, and Performance FactorszebmechNo ratings yet
- Why Vibration Testing Needed?Document12 pagesWhy Vibration Testing Needed?MamdouhAlhanafyNo ratings yet
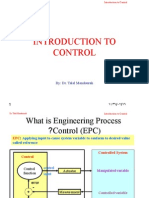
- Introduction To Control: By: Dr. Talal MandourahDocument12 pagesIntroduction To Control: By: Dr. Talal MandourahMamdouhAlhanafyNo ratings yet
- 11 PumpsDocument46 pages11 PumpsMamdouhAlhanafyNo ratings yet
- Pressure Relief Devices Scott OstrowskiDocument82 pagesPressure Relief Devices Scott OstrowskiAffify AfifyNo ratings yet
- 7 - Distillation0 PDFDocument58 pages7 - Distillation0 PDFMamdouhAlhanafyNo ratings yet
- Chapter 1 - IntroductionDocument26 pagesChapter 1 - IntroductionMamdouhAlhanafyNo ratings yet
- Chapter 3 - Maintenance OrganizationDocument23 pagesChapter 3 - Maintenance OrganizationMamdouhAlhanafyNo ratings yet
- PT FundamentalsDocument84 pagesPT FundamentalsMamdouhAlhanafyNo ratings yet
- Chapter 2 - Maintenance PoliciesDocument62 pagesChapter 2 - Maintenance PoliciesMamdouhAlhanafy100% (2)
- 16 - Turbo Expanders 0Document13 pages16 - Turbo Expanders 0MamdouhAlhanafy100% (1)
- Flare Systems Design and Operation GuideDocument49 pagesFlare Systems Design and Operation GuideMamdouhAlhanafy82% (11)
- Flare Systems Design and Operation GuideDocument49 pagesFlare Systems Design and Operation GuideMamdouhAlhanafy82% (11)
- Improve Your SkillsDocument112 pagesImprove Your SkillsAhmed El-Saadany100% (1)
- Pipe Fitter HandbookDocument62 pagesPipe Fitter HandbookMamdouhAlhanafy89% (9)
- Maintenance Types and ObjectivesDocument35 pagesMaintenance Types and ObjectivesVaraGoudNo ratings yet
- Hydrulic Hose and FittingDocument66 pagesHydrulic Hose and FittingMamdouhAlhanafyNo ratings yet
- Improving Pumping System PerformanceDocument122 pagesImproving Pumping System PerformanceFSnyderJr100% (7)
- Water JetDocument18 pagesWater Jetjithinaravind007100% (1)
- Bearing DesignDocument11 pagesBearing DesignArun DhawanNo ratings yet
- Die Bosch ABS The World's First System For Closed-Loop Control of Vehicle DynamicsDocument27 pagesDie Bosch ABS The World's First System For Closed-Loop Control of Vehicle DynamicsMamdouhAlhanafy100% (1)
- Material PropertiesDocument331 pagesMaterial PropertiesMamdouhAlhanafyNo ratings yet