You might also like
- Stage Event Lighting Fundamentals: Event Lighting Setup and ControlFrom EverandStage Event Lighting Fundamentals: Event Lighting Setup and ControlNo ratings yet
- 16.voltmeter Calibration Punzalan - Tuliao.dumangasDocument87 pages16.voltmeter Calibration Punzalan - Tuliao.dumangasjomar lipaopaoNo ratings yet
- Calibration of Eddycon CL - ENGDocument36 pagesCalibration of Eddycon CL - ENGNathaniel LuraNo ratings yet
- Sop Edited CeuticsDocument33 pagesSop Edited Ceuticsbandameedi.ramu2819No ratings yet
- Pass Ultrasound Physics Exam Review Match the AnswersFrom EverandPass Ultrasound Physics Exam Review Match the AnswersRating: 4 out of 5 stars4/5 (4)
- Learn Arduino Sensor With Projects For Beginners by James ConnerDocument80 pagesLearn Arduino Sensor With Projects For Beginners by James ConnerRobertofermagNo ratings yet
- 1b Static & Dynamic Characteristics&Loading Effect PDFDocument45 pages1b Static & Dynamic Characteristics&Loading Effect PDFvishnuNo ratings yet
- Ansys Electric Machines and Power ElectronicsDocument58 pagesAnsys Electric Machines and Power ElectronicsEnmel Martínez BejaranoNo ratings yet
- PIDDocument21 pagesPIDMukesh JainNo ratings yet
- Xmta 7000 PDFDocument4 pagesXmta 7000 PDFjonathan_calixto_4No ratings yet
- 3 1 1 A Vex InputsoutputsDocument2 pages3 1 1 A Vex Inputsoutputsapi-267912530No ratings yet
- Robotc: ProcedureDocument3 pagesRobotc: Procedureapi-264220529No ratings yet
- 3 1 1 A Vex InputsoutputsDocument3 pages3 1 1 A Vex Inputsoutputsapi-264098585No ratings yet
- Experiment 01: Lab 01: Introduction To InstrumentsDocument9 pagesExperiment 01: Lab 01: Introduction To InstrumentsBilal KhanNo ratings yet
- Eca Ii Lab 1Document14 pagesEca Ii Lab 1Tausif MinhasNo ratings yet
- Lab # 1 Introduction To Instruments. (Digital Oscilloscope and Digital Function Generator) and Software LtspiceDocument23 pagesLab # 1 Introduction To Instruments. (Digital Oscilloscope and Digital Function Generator) and Software LtspiceMISBAH BATOOLNo ratings yet
- Dso138 Mini Beginners How To TestDocument10 pagesDso138 Mini Beginners How To TestfaraonulNo ratings yet
- Mud System SensorsDocument14 pagesMud System SensorsMohamad TayeaNo ratings yet
- A10 Laser Touch Sensing R30iA March 2014Document78 pagesA10 Laser Touch Sensing R30iA March 2014Clecio de PaulaNo ratings yet
- Zero Span AdjustmentDocument17 pagesZero Span AdjustmentEdward NyamandeNo ratings yet
- Motion Sensor User GuideDocument7 pagesMotion Sensor User GuideXavier OrtizNo ratings yet
- Understanding and fixing Vendor Settings for a RUIDA laser controllerDocument13 pagesUnderstanding and fixing Vendor Settings for a RUIDA laser controller911 AlfaHostNo ratings yet
- Calibration of Pepperl+Fuchs UB4000Document2 pagesCalibration of Pepperl+Fuchs UB4000Sohail QureshiNo ratings yet
- ET-702 ManualDocument25 pagesET-702 Manualecollar2011No ratings yet
- 3d-Finder Manual R04 ENGDocument13 pages3d-Finder Manual R04 ENGAlexandru BuduNo ratings yet
- Science Learning Center University of Michigan - Dearborn: Use of The OscilloscopeDocument49 pagesScience Learning Center University of Michigan - Dearborn: Use of The OscilloscopeAlex ZadicNo ratings yet
- Unico 1100 Drive HELP Diagnostics 8.20Document15 pagesUnico 1100 Drive HELP Diagnostics 8.20Арсен ТёмныйNo ratings yet
- ET-802 ManualDocument24 pagesET-802 Manualecollar2011No ratings yet
- Science Learning Center University of Michigan - Dearborn: Use of The OscilloscopeDocument47 pagesScience Learning Center University of Michigan - Dearborn: Use of The OscilloscopebingNo ratings yet
- 3 1 1 A Vex InputsoutputsDocument3 pages3 1 1 A Vex Inputsoutputsapi-272055202No ratings yet
- Clap Switch Using ArduinoDocument7 pagesClap Switch Using Arduinohamed razaNo ratings yet
- TurningDocument31 pagesTurningvawog68577No ratings yet
- Electron Paramagnetic Resonance Spectroscopy User ManualDocument33 pagesElectron Paramagnetic Resonance Spectroscopy User ManualGRagaNo ratings yet
- User'S Manual: Digital Satellite Meter SH-200+Document6 pagesUser'S Manual: Digital Satellite Meter SH-200+oxsNo ratings yet
- User'S Manual: Digital Satellite Meter SH-500Document8 pagesUser'S Manual: Digital Satellite Meter SH-500josewanNo ratings yet
- Pro 3600 ManualDocument16 pagesPro 3600 Manualdavidjm88No ratings yet
- Epoch: Instruction ManualDocument10 pagesEpoch: Instruction ManualDpt HtegnNo ratings yet
- DK1s Manual EDocument7 pagesDK1s Manual EkotecinfoNo ratings yet
- NOVA OSD V1.0 ManualDocument7 pagesNOVA OSD V1.0 ManualAltemarFernandesdeOliveiraNo ratings yet
- Touch Dimmer Switch Circuit Using ArduinoDocument7 pagesTouch Dimmer Switch Circuit Using ArduinoJoseph IsraelNo ratings yet
- Terratrip 101 Manual English PDFDocument5 pagesTerratrip 101 Manual English PDFSunnyDreNo ratings yet
- Automatic Home Appliances Control Using Visitor CounterDocument13 pagesAutomatic Home Appliances Control Using Visitor Countervikas singh rathodNo ratings yet
- Lab 9Document13 pagesLab 9Abu BakarNo ratings yet
- Ser 1p CatalogueDocument16 pagesSer 1p CatalogueKushalNo ratings yet
- PoweredUp-ProgrammingBlocksDocument16 pagesPoweredUp-ProgrammingBlocksprobephone79No ratings yet
- Lightmeter User Guide Model EA30 Easy View DigitalDocument7 pagesLightmeter User Guide Model EA30 Easy View DigitalGordon RoweNo ratings yet
- Lab 2 Analog Encoder PWM R9Document5 pagesLab 2 Analog Encoder PWM R9subairiNo ratings yet
- Auto Meter VF: Instruction Manual Manuel D'instructionsDocument37 pagesAuto Meter VF: Instruction Manual Manuel D'instructionsPablo Cabello EspinozaNo ratings yet
- MAE106 Lab1 Rev2017Document9 pagesMAE106 Lab1 Rev2017Julius CansinoNo ratings yet
- Vibration Sensor: FeaturesDocument4 pagesVibration Sensor: FeaturesALNATRON GROUPSNo ratings yet
- Interfacing of Temperature Sensor LM 35Document9 pagesInterfacing of Temperature Sensor LM 35shubham309No ratings yet
- LAB1 and LAB 2Document19 pagesLAB1 and LAB 2Javeria AzeemNo ratings yet
- Learn Arduino Sensor With Projects For Beginners by James ConnerDocument80 pagesLearn Arduino Sensor With Projects For Beginners by James ConnerMartin Ariel ReyesNo ratings yet
- Using an oscilloscope to analyze audio signalsDocument25 pagesUsing an oscilloscope to analyze audio signalsFnd MuorNo ratings yet
- ELE551 Embedded Systems and IOT Fundamentals Mid Sem Project Work Project Title: Arduino SunflowerDocument9 pagesELE551 Embedded Systems and IOT Fundamentals Mid Sem Project Work Project Title: Arduino SunflowerKRISHNAMURTHY D 1940148No ratings yet
- Analog Read Serial: Hardware RequiredDocument5 pagesAnalog Read Serial: Hardware RequiredjaluadiNo ratings yet
- Satlook Lite User ManualDocument18 pagesSatlook Lite User ManualbebebrendaNo ratings yet
- Instructions For USB Tester With Full Colour Display: Technical ParametersDocument3 pagesInstructions For USB Tester With Full Colour Display: Technical ParametersTrần Quang TuyênNo ratings yet
- LEDs and Sensors Part 2: Converting Analog Signals to Digital with ArduinoDocument5 pagesLEDs and Sensors Part 2: Converting Analog Signals to Digital with ArduinopraeclioNo ratings yet
- Experiment 1: Introduction To Electronics InstrumentationsDocument17 pagesExperiment 1: Introduction To Electronics InstrumentationsSharifah Syed HamzahNo ratings yet
- LiteVNA - User GuideDocument28 pagesLiteVNA - User GuideKikdiNo ratings yet
- TC64 Type-C Tester Meter Instruction 08.08Document3 pagesTC64 Type-C Tester Meter Instruction 08.08Chu Chuito TachinNo ratings yet
- Documentation of Our Building ProcessDocument1 pageDocumentation of Our Building Processapi-264098583No ratings yet
- Test Descirption Template Zienty 2Document2 pagesTest Descirption Template Zienty 2api-264092110No ratings yet
- DecisionmatrixtemplateDocument1 pageDecisionmatrixtemplateapi-264092110No ratings yet
- MainDocument2 pagesMainapi-264092110No ratings yet
- 1Document4 pages1api-264092110No ratings yet
- Coding Conclusion QuestionsDocument1 pageCoding Conclusion Questionsapi-264092110No ratings yet
- Customer NeedsDocument4 pagesCustomer Needsapi-264092110No ratings yet
- Test 1 DescriptionDocument2 pagesTest 1 Descriptionapi-264092110No ratings yet
- Designbrieftemplate 1Document1 pageDesignbrieftemplate 1api-264092110No ratings yet
- 1 2 11a P GliderdesignreportDocument3 pages1 2 11a P Gliderdesignreportapi-264092110No ratings yet
- DecisionmatrixtemplateDocument1 pageDecisionmatrixtemplateapi-264092110No ratings yet
- 1 3 1 A Vex Solarhydrogensystem PlainDocument5 pages1 3 1 A Vex Solarhydrogensystem Plainapi-264092523No ratings yet
- CharacterDocument1 pageCharacterapi-264092110No ratings yet
- DesignbrieftemplateDocument1 pageDesignbrieftemplateapi-264092110No ratings yet
- DecisionmatrixDocument1 pageDecisionmatrixapi-264092110No ratings yet
- Design BriefDocument1 pageDesign Briefapi-264098585No ratings yet
- AccessoryDocument1 pageAccessoryapi-264092110No ratings yet
- DesignbrieftemplateDocument1 pageDesignbrieftemplateapi-264092110No ratings yet
- DesignbrieftemplateDocument1 pageDesignbrieftemplateapi-264092110No ratings yet
- Cube AnalyisisDocument3 pagesCube Analyisisapi-264092110No ratings yet
- DesignbriefDocument1 pageDesignbriefapi-264092110No ratings yet
- Decision Matrix Template: CriteriaDocument1 pageDecision Matrix Template: Criteriaapi-264092110No ratings yet
- Wetwon LV Series Busway CATALOG (For Materials)Document40 pagesWetwon LV Series Busway CATALOG (For Materials)NanmNo ratings yet
- Zc300 Specification SheetDocument4 pagesZc300 Specification Sheetgroovey9040No ratings yet
- Troubleshooting For M38 InstrumentsDocument7 pagesTroubleshooting For M38 Instrumentsm606No ratings yet
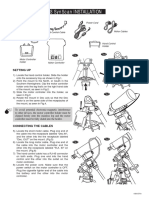
- EQ3 SynScan INSTALLATION guideDocument1 pageEQ3 SynScan INSTALLATION guideOscar MalamudNo ratings yet
- Cost To Cost Price ListDocument4 pagesCost To Cost Price ListSuneet SinghNo ratings yet
- Curso AvrDocument41 pagesCurso AvrGeneracion ELPNo ratings yet
- Car Speed Detector (1) (Read-Only) 4 (1) (Read-Only) 5 (1) (Read-Only) 6Document16 pagesCar Speed Detector (1) (Read-Only) 4 (1) (Read-Only) 5 (1) (Read-Only) 6Shadab AnsariNo ratings yet
- Sony MZ-B50 Service ManualDocument72 pagesSony MZ-B50 Service ManualDavid PiçarraNo ratings yet
- HP Journal 1975-03Document24 pagesHP Journal 1975-03dwisselNo ratings yet
- LD1010DDocument5 pagesLD1010DJelatang KalapiahNo ratings yet
- ANSI CodesDocument12 pagesANSI CodesmgkvprNo ratings yet
- 5.2.1.7 Lab - Viewing The Switch MAC Address TableDocument4 pages5.2.1.7 Lab - Viewing The Switch MAC Address TableMarc WallinNo ratings yet
- Cost To Cost Pricelist PDFDocument8 pagesCost To Cost Pricelist PDFDeepak NamdeoNo ratings yet
- Nora ManualDocument50 pagesNora ManualOlaru Vrajeala Penala Catalin-MihailNo ratings yet
- Alcatel 1600 Series - Carritech TelecommunicationsDocument2 pagesAlcatel 1600 Series - Carritech TelecommunicationsCarritech TelecommunicationsNo ratings yet
- GPS900 Quick Guide enDocument12 pagesGPS900 Quick Guide enFlorin Marian IftimeNo ratings yet
- Astable & Monostable Multivibrator CircuitsDocument4 pagesAstable & Monostable Multivibrator CircuitsJiva 1107No ratings yet
- So NetDocument110 pagesSo NetRaj_Jai03No ratings yet
- Street Children 7Document2 pagesStreet Children 7Hoban LoredanaNo ratings yet
- Conect OresDocument172 pagesConect OresJuan Diego García LópezNo ratings yet
- Maxon EC20 Flat 3wattDocument1 pageMaxon EC20 Flat 3wattElectromateNo ratings yet
- Factors On Which Self Inductance of CoilDocument19 pagesFactors On Which Self Inductance of Coilbhagyashree062005No ratings yet
- 1sdc210033d0204 TC Tmax XT Iec enDocument348 pages1sdc210033d0204 TC Tmax XT Iec enBolivar MartinezNo ratings yet
- 74HC HCT597Document20 pages74HC HCT597Hamid SamavatiNo ratings yet
- AHU EjemploDocument76 pagesAHU Ejemplocrstian avilaNo ratings yet
- MDC-2900P - Installation Manual 0092629002-03 PDFDocument96 pagesMDC-2900P - Installation Manual 0092629002-03 PDF'RomNo ratings yet
- ECE521 Presentation Evaluation Form Sept 2015Document3 pagesECE521 Presentation Evaluation Form Sept 2015ÎQbãl HãikãmNo ratings yet