You might also like
- Blog - The Online DiaryDocument1 pageBlog - The Online DiaryAlya FarhanaNo ratings yet
- WORD FAMILY Reading and Penmanship MODULE PDFDocument23 pagesWORD FAMILY Reading and Penmanship MODULE PDFevannaNo ratings yet
- LP 31 R Observe - CheckedDocument5 pagesLP 31 R Observe - CheckedAlya FarhanaNo ratings yet
- Sketch Competition For Primary Schools 2021Document15 pagesSketch Competition For Primary Schools 2021Waris SkssNo ratings yet
- Sketch Competition For Secondary Schools 2021Document15 pagesSketch Competition For Secondary Schools 2021Alya FarhanaNo ratings yet
- Year 2 Step by Step Writing Module Part 1Document52 pagesYear 2 Step by Step Writing Module Part 1Loi Teik WeiNo ratings yet
- Alpha Vocab ModuleDocument15 pagesAlpha Vocab ModuleNorazah Abdul ShukorNo ratings yet
- Online Public Speaking Competition 2021Document10 pagesOnline Public Speaking Competition 2021Faz FuzeNo ratings yet
- Wiriting 014 PDFDocument26 pagesWiriting 014 PDFSaranyieh RamasamyNo ratings yet
- Year 3 Daily Lesson Plans SummaryDocument6 pagesYear 3 Daily Lesson Plans SummaryAlya FarhanaNo ratings yet
- Online Storytelling For Primary SchoolsDocument11 pagesOnline Storytelling For Primary SchoolsAlya FarhanaNo ratings yet
- Wiriting 014 PDFDocument26 pagesWiriting 014 PDFSaranyieh RamasamyNo ratings yet
- Backup of JADUAL GURU GANTI 2020Document1 pageBackup of JADUAL GURU GANTI 2020Alya FarhanaNo ratings yet
- Poetry Recitation Competition GuideDocument15 pagesPoetry Recitation Competition GuideMUHAMMAD HAZWAN BIN KAYUN MoeNo ratings yet
- Supplementary: WorksheetsDocument22 pagesSupplementary: WorksheetsFaiza Mohd JaisNo ratings yet
- Year 1 (Revised) 2017 English Txbook PDFDocument152 pagesYear 1 (Revised) 2017 English Txbook PDFAlya FarhanaNo ratings yet
- Grammar Module 2Document129 pagesGrammar Module 2Puvanes VadiveluNo ratings yet
- Cer Lesson Plan 68fDocument2 pagesCer Lesson Plan 68fAlya FarhanaNo ratings yet
- Professional Up-Skilling of English Language Teachers: - AimsDocument12 pagesProfessional Up-Skilling of English Language Teachers: - AimsAlya FarhanaNo ratings yet
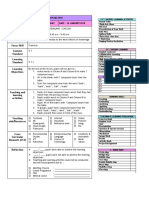
- Week: 3 Class / Subject Time Topic/Theme Focus Skill Content Standard Learning Standard Learning ObjectivesDocument9 pagesWeek: 3 Class / Subject Time Topic/Theme Focus Skill Content Standard Learning Standard Learning ObjectivesAlya FarhanaNo ratings yet
- BORANG TRANSIT BI (INDIVIDU T1-T3) - Roshidah Mohd Ghauth SK TMN SelasihDocument6 pagesBORANG TRANSIT BI (INDIVIDU T1-T3) - Roshidah Mohd Ghauth SK TMN SelasihAnonymous 8twtM3NHQNo ratings yet
- Efficient - Exper TeachersDocument8 pagesEfficient - Exper TeachersAlya FarhanaNo ratings yet
- Alia Artikel ArDocument7 pagesAlia Artikel ArAlya FarhanaNo ratings yet
- CEFR Handbook Primary School PDFDocument17 pagesCEFR Handbook Primary School PDFAlya FarhanaNo ratings yet
- RPT Y1 2017Document15 pagesRPT Y1 2017Lanun BluesNo ratings yet
- List of Tables & FiguresDocument2 pagesList of Tables & FiguresAlya FarhanaNo ratings yet
- Task 1 (Academic Writing) : Perkhidmatan (Ahmad Zaki & Razlee, 2010) - The Emphasis Is Given in Fulfilling TheDocument8 pagesTask 1 (Academic Writing) : Perkhidmatan (Ahmad Zaki & Razlee, 2010) - The Emphasis Is Given in Fulfilling TheAlya FarhanaNo ratings yet
- Facts About Animals: Hornbill Tiger Orang Utan PythonDocument2 pagesFacts About Animals: Hornbill Tiger Orang Utan PythonAlya FarhanaNo ratings yet
- Malaysian Legend of MahsuriDocument3 pagesMalaysian Legend of MahsuriAlya FarhanaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Wireshark Lab: 802.11: Approach, 6 Ed., J.F. Kurose and K.W. RossDocument5 pagesWireshark Lab: 802.11: Approach, 6 Ed., J.F. Kurose and K.W. RossN Azzati LabibahNo ratings yet
- Siemens ProjectDocument17 pagesSiemens ProjectMayisha Alamgir100% (1)
- Everything You Need to Know About Distribution TransformersDocument2 pagesEverything You Need to Know About Distribution TransformersDONNYMUCKTEENo ratings yet
- Sys Admin Guide Xerox WorkCentre 7775Document185 pagesSys Admin Guide Xerox WorkCentre 7775dankorzon1No ratings yet
- Holmes 1993Document8 pagesHolmes 1993Rumaisa KrubaNo ratings yet
- Financial Ratios ActivityDocument3 pagesFinancial Ratios ActivityNCF- Student Assistants' OrganizationNo ratings yet
- Understanding Nominal Pipe Sizes (NPS) and Pipe DimensionsDocument39 pagesUnderstanding Nominal Pipe Sizes (NPS) and Pipe DimensionsprathikNo ratings yet
- Priceliost Ecatalog 2021 Div. DiagnosticDocument2 pagesPriceliost Ecatalog 2021 Div. Diagnosticwawan1010No ratings yet
- Armed Struggle in Africa (1969)Document167 pagesArmed Struggle in Africa (1969)Dr.VolandNo ratings yet
- Lecture 2 Leader-Centred PerspectivesDocument24 pagesLecture 2 Leader-Centred PerspectivesLIVINGSTONE CAESARNo ratings yet
- Fuel Pumps Left in Off PositionDocument7 pagesFuel Pumps Left in Off PositionherbuelNo ratings yet
- G.R. No. 226140 - People Vs EspirituDocument24 pagesG.R. No. 226140 - People Vs EspirituAlfred Robert BabasoroNo ratings yet
- Create Email Alerts For Mulitple People or Group - XpoDocument79 pagesCreate Email Alerts For Mulitple People or Group - XponiravmodyNo ratings yet
- About Kia Motors Corporation: All-NewDocument19 pagesAbout Kia Motors Corporation: All-NewWessam FathiNo ratings yet
- NYU Stern Evaluation NewsletterDocument25 pagesNYU Stern Evaluation NewsletterCanadianValueNo ratings yet
- 2022 Semester 2 Letter To Parents - FinalDocument7 pages2022 Semester 2 Letter To Parents - FinalRomanceforpianoNo ratings yet
- Case Study ON: The Spark Batteries LTDDocument8 pagesCase Study ON: The Spark Batteries LTDRitam chaturvediNo ratings yet
- March 2017Document11 pagesMarch 2017Anonymous NolO9drW7MNo ratings yet
- Air Purification Solution - TiPE Nano Photocatalyst PDFDocument2 pagesAir Purification Solution - TiPE Nano Photocatalyst PDFPedro Ortega GómezNo ratings yet
- Creating Rapid Prototype Metal CastingsDocument10 pagesCreating Rapid Prototype Metal CastingsShri JalihalNo ratings yet
- Project Defence: Assessment of Fire Safety Preparedness of Technical UniversitiesDocument10 pagesProject Defence: Assessment of Fire Safety Preparedness of Technical UniversitiesNii BoyeNo ratings yet
- Autocad 2016Document59 pagesAutocad 2016Kaye OleaNo ratings yet
- People VS Yancon-DumacasDocument2 pagesPeople VS Yancon-Dumacasvincent nifasNo ratings yet
- 01 - Accounting For Managers PDFDocument151 pages01 - Accounting For Managers PDFAmit Kumar PandeyNo ratings yet
- Dimetra Tetra System White PaperDocument6 pagesDimetra Tetra System White PapermosaababbasNo ratings yet
- Research career paths in Spain: funding opportunities overviewDocument7 pagesResearch career paths in Spain: funding opportunities overviewfidalgocastroNo ratings yet
- Monopoly - Indian RailwaysDocument35 pagesMonopoly - Indian Railwaysvrj1091No ratings yet
- IPR GUIDE COVERS PATENTS, TRADEMARKS AND MOREDocument22 pagesIPR GUIDE COVERS PATENTS, TRADEMARKS AND MOREShaheen TajNo ratings yet
- Poka Yoke BDocument31 pagesPoka Yoke BjaymuscatNo ratings yet
- EffectofObligations PDFDocument0 pagesEffectofObligations PDFÄnne Ü KimberlieNo ratings yet