You might also like
- User's Manual For TL-A4 Laser Engraving and Cutting Control SystemV1.3Document79 pagesUser's Manual For TL-A4 Laser Engraving and Cutting Control SystemV1.3sahib singhNo ratings yet
- CW 5000 ManualDocument13 pagesCW 5000 ManualPARTHIBAN RETECHNo ratings yet
- Coredraw X7 Plug-In Installation: Shenzhen Ruida Technology Co., LTDDocument5 pagesCoredraw X7 Plug-In Installation: Shenzhen Ruida Technology Co., LTDAttarNo ratings yet
- LS Fiber Optics enDocument48 pagesLS Fiber Optics enboopelectraNo ratings yet
- LS Fiber Optics EN PDFDocument48 pagesLS Fiber Optics EN PDFjonoNo ratings yet
- Socomac Bus Bar SupportDocument20 pagesSocomac Bus Bar SupportbhathiendraNo ratings yet
- Conical and cylindrical standoff insulatorsDocument29 pagesConical and cylindrical standoff insulatorstechnomuraliNo ratings yet
- S&A CW-5000,5200 Industrial Water Chiller PDFDocument13 pagesS&A CW-5000,5200 Industrial Water Chiller PDFMia FungNo ratings yet
- CWFL-4000 6000 Manual - 20210601141307Document14 pagesCWFL-4000 6000 Manual - 20210601141307mehrdadgeminiNo ratings yet
- RDWorksV8 Software and The Plug in Software SetUp ManualDocument15 pagesRDWorksV8 Software and The Plug in Software SetUp Manualcabe79No ratings yet
- Haier Hrf-329aa 349aa 369aaDocument32 pagesHaier Hrf-329aa 349aa 369aaDmitriy BalabashNo ratings yet
- LaserDocument2 pagesLaserodhiles1No ratings yet
- CorelDRAW 10 - User ManualDocument202 pagesCorelDRAW 10 - User ManualGrigorescu CatalinNo ratings yet
- Controller ManualDocument20 pagesController ManualLuncan RaduNo ratings yet
- Instruction Manual of Weldo Dispensing Machine 2Document96 pagesInstruction Manual of Weldo Dispensing Machine 2Vanina Altamirano100% (1)
- Brochure FonsbdDocument41 pagesBrochure FonsbdM H Khan RonyNo ratings yet
- RDWork Laser Engraving Cutting Software V1.3Document79 pagesRDWork Laser Engraving Cutting Software V1.3Дудар ВадімNo ratings yet
- Fiber Laser User Manual - YLP-HB50Document20 pagesFiber Laser User Manual - YLP-HB50ALVARO ROSENDO GARCIANo ratings yet
- Ultrasonic Fabric Embossing Machine PDFDocument7 pagesUltrasonic Fabric Embossing Machine PDFmohsintNo ratings yet
- Installation of Rdworks / Laserworks V8: Rabbit Laser Usa 1320 Hook Drive Middletown, Ohio 45042 Phone: 513-217-5707Document11 pagesInstallation of Rdworks / Laserworks V8: Rabbit Laser Usa 1320 Hook Drive Middletown, Ohio 45042 Phone: 513-217-5707fredireksi erikNo ratings yet
- VJ1304 Service Manual M 02Document444 pagesVJ1304 Service Manual M 02Melvin LegauxNo ratings yet
- Design Module Users GuideDocument72 pagesDesign Module Users GuideMuhammad Ahtisham AsifNo ratings yet
- Corel 2009 DecDocument44 pagesCorel 2009 DecCorneliu MeciuNo ratings yet
- Thunder Laser Software RDWorksV8.0 USER MANUAL PDFDocument64 pagesThunder Laser Software RDWorksV8.0 USER MANUAL PDFAfzalul Karim NirvickNo ratings yet
- Manual Mantenimiento VJ1604 MutohDocument448 pagesManual Mantenimiento VJ1604 MutohjavierNo ratings yet
- cq9303f SM PDFDocument1,902 pagescq9303f SM PDFcesar salasNo ratings yet
- 350 Laser Machine Operating ManualDocument109 pages350 Laser Machine Operating ManualLee RomanNo ratings yet
- Catalogo Taian Taizhuo CNC Turning Center TCK550Document6 pagesCatalogo Taian Taizhuo CNC Turning Center TCK550DiegoNo ratings yet
- Iq50 - Iq80 - Ix6 - Ix9: Ensemble Baie Electronique / Electronic Cabinet AssemblyDocument15 pagesIq50 - Iq80 - Ix6 - Ix9: Ensemble Baie Electronique / Electronic Cabinet Assemblyluis borgeNo ratings yet
- SenFeng CNC ManualDocument11 pagesSenFeng CNC ManualJuanjo AcvdoNo ratings yet
- AuraJet Series II UserManualDocument48 pagesAuraJet Series II UserManualdarkenelNo ratings yet
- Laser Engraving and Cutting Machines.20121024.144305 PDFDocument2 pagesLaser Engraving and Cutting Machines.20121024.144305 PDFanon_232871814100% (1)
- Cutting Head Q80Document22 pagesCutting Head Q80luis borgeNo ratings yet
- Puma II Users ManualDocument54 pagesPuma II Users ManualDiana Arghir100% (1)
- Roland cx24Document71 pagesRoland cx24BryanHumphries100% (2)
- Engineer'S Manual: Computer-Controlled Dry-Head, Lockstitch, Sleeve Setting Machine With Multi-Programming DeviceDocument124 pagesEngineer'S Manual: Computer-Controlled Dry-Head, Lockstitch, Sleeve Setting Machine With Multi-Programming Devicenorman ahmadNo ratings yet
- Explore Your Creativity: With RhinotecDocument2 pagesExplore Your Creativity: With RhinotecPopoVespaholictechNo ratings yet
- SM 7056i 8056i Rev00 PDFDocument1,614 pagesSM 7056i 8056i Rev00 PDFmauro_ferrero_No ratings yet
- AXYZ Vision SystemDocument27 pagesAXYZ Vision SystemPP100% (1)
- Bizhub PRO 1200 1200P Spec Sheet V1Document2 pagesBizhub PRO 1200 1200P Spec Sheet V1tNo ratings yet
- Roland CX - 24 - 12Document64 pagesRoland CX - 24 - 12BryanHumphriesNo ratings yet
- Omron Inverter 3g3xv SelfeederDocument79 pagesOmron Inverter 3g3xv Selfeedervphongdl100% (1)
- pumaII PDFDocument54 pagespumaII PDFJuan Sanchez GutierraNo ratings yet
- Mimaki Engineering Co., LTD.: You Can Also Download The Latest Manual From Official WebsiteDocument194 pagesMimaki Engineering Co., LTD.: You Can Also Download The Latest Manual From Official WebsiteVictor Julio López HernándezNo ratings yet
- D203176-20 UCJV300,150 OperationManual eDocument158 pagesD203176-20 UCJV300,150 OperationManual eJuan RomeroNo ratings yet
- Spme Assignment: Sewing Products Machinery and EquipmentDocument29 pagesSpme Assignment: Sewing Products Machinery and EquipmentVishnu P RNo ratings yet
- Portable Fundus Camera FC160Document37 pagesPortable Fundus Camera FC160AbiNo ratings yet
- UJF 3042FX OperationManual D202217 V19Document144 pagesUJF 3042FX OperationManual D202217 V19miletasindjelicNo ratings yet
- OMM-00107 HS100 Gen1 Sheet Feeder Operations Guide ADocument21 pagesOMM-00107 HS100 Gen1 Sheet Feeder Operations Guide ABruce CampanelliNo ratings yet
- Options MAY14Document20 pagesOptions MAY14Enrique VasquezNo ratings yet
- BCL MUser Manual Bodor Laser 4Document29 pagesBCL MUser Manual Bodor Laser 4Marius MocanuNo ratings yet
- Corel 08 AprilDocument46 pagesCorel 08 AprilCorneliu MeciuNo ratings yet
- Flexi8.0 Help ManualDocument182 pagesFlexi8.0 Help Manualjhondoe77100% (1)
- Punch ManualDocument464 pagesPunch ManualJorge Armando Astorayme MansillaNo ratings yet
- User's Manual of RDC6445G V1.0Document57 pagesUser's Manual of RDC6445G V1.0PauloTexaNo ratings yet
- User's Manual of RDC6332G Control System: RD Co., LTDDocument47 pagesUser's Manual of RDC6332G Control System: RD Co., LTDcassioalvarengaNo ratings yet
- Manual RUIDADocument51 pagesManual RUIDALaser ArtNo ratings yet
- SA80-PM-031 - Saturn 8000 1717V Service Manual - 1.2 - VW - 1.3 - 20211014 - NO GMP - Old AddressDocument45 pagesSA80-PM-031 - Saturn 8000 1717V Service Manual - 1.2 - VW - 1.3 - 20211014 - NO GMP - Old AddressArllette MeridaNo ratings yet
- Pro Soft TP SW Oper Man 1338 Rev 7 en GBDocument132 pagesPro Soft TP SW Oper Man 1338 Rev 7 en GBGerardo LlanesNo ratings yet
- User'S Manual of Laser Engraving Cutting Software Rdworks8.0Document68 pagesUser'S Manual of Laser Engraving Cutting Software Rdworks8.0Juanjo Acvdo100% (1)
- Plani de Bloque 2016 2 BasicoDocument3 pagesPlani de Bloque 2016 2 BasicoJuanjo AcvdoNo ratings yet
- Unidad Educativa Fiscal Fae No. 2: Annual Curriculum PlanDocument8 pagesUnidad Educativa Fiscal Fae No. 2: Annual Curriculum PlanJuanjo AcvdoNo ratings yet
- Daily Life Lessons PlanDocument6 pagesDaily Life Lessons PlanJuanjo AcvdoNo ratings yet
- Ethernet Configration ManualDocument3 pagesEthernet Configration ManualJuanjo AcvdoNo ratings yet
- Lesson Plan 8 To 11 Dec. HoyDocument2 pagesLesson Plan 8 To 11 Dec. HoyJuanjo AcvdoNo ratings yet
- Unidad Educativa Fiscal Fae #2 Weekly Planning: Teacher: Courses: Week Of: UnitDocument13 pagesUnidad Educativa Fiscal Fae #2 Weekly Planning: Teacher: Courses: Week Of: UnitJuanjo AcvdoNo ratings yet
- CNC Router ManualDocument51 pagesCNC Router ManualJuanjo AcvdoNo ratings yet
- RDC6334G Biref EnglishDocument4 pagesRDC6334G Biref EnglishJuanjo AcvdoNo ratings yet
- SenFeng CNC ManualDocument11 pagesSenFeng CNC ManualJuanjo AcvdoNo ratings yet
- 2005 ArtCAMProReferenceManual8.0Document597 pages2005 ArtCAMProReferenceManual8.0Spyros VeronikisNo ratings yet
- ArtcamDocument351 pagesArtcamMilannet Milannet100% (5)
- P200C ThermostatDocument14 pagesP200C ThermostatYaNo ratings yet
- c221 E3490d Uh SeriesDocument20 pagesc221 E3490d Uh SeriesKokYee Chan100% (1)
- Pages From 3. 22kV Kiosk Distribution Substation - Scope of WorksDocument8 pagesPages From 3. 22kV Kiosk Distribution Substation - Scope of WorksMauricio SaulNo ratings yet
- Crane OperationDocument67 pagesCrane OperationErc Nunez V100% (2)
- Operation Manual for CNC Turning Center GA-2000/L/300 SeriesDocument392 pagesOperation Manual for CNC Turning Center GA-2000/L/300 SeriesVladimirAgeevNo ratings yet
- KLS 2016 CatalogueDocument56 pagesKLS 2016 CatalogueiamlpNo ratings yet
- Pneutrainer 200Document36 pagesPneutrainer 200Faus1214No ratings yet
- PM SM Eng 20150115Document132 pagesPM SM Eng 20150115nick nickNo ratings yet
- En HQ Mini Analog Pro LoresDocument16 pagesEn HQ Mini Analog Pro LoresBaldomero de Jesus CruzNo ratings yet
- 164.IBM - ThinkPad R61, R61e and R61i (15.4-Inch Wide Screen)Document239 pages164.IBM - ThinkPad R61, R61e and R61i (15.4-Inch Wide Screen)Soporte Tecnico Buenos AiresNo ratings yet
- Digital dual fuel burners guideDocument12 pagesDigital dual fuel burners guidePramudhitya FirzaNo ratings yet
- Pelle CASE 788 Uniquement Schéma ÉlectriquesDocument50 pagesPelle CASE 788 Uniquement Schéma Électriquesdakar3No ratings yet
- Specification LHB RMPUDocument43 pagesSpecification LHB RMPUShailendra Arun75% (4)
- GEA Fil382 ATpicco UK DH-DriftDocument56 pagesGEA Fil382 ATpicco UK DH-DriftFlorin RaduNo ratings yet
- 2D-TZ576 - Instruction Manual (CC-Link Interface) BFP-A8701-E (11.12) PDFDocument52 pages2D-TZ576 - Instruction Manual (CC-Link Interface) BFP-A8701-E (11.12) PDFMr NovaNo ratings yet
- Electrical Troubleshooting: Ohm's Law FundamentalsDocument8 pagesElectrical Troubleshooting: Ohm's Law FundamentalsNirav BarotNo ratings yet
- Price List PL-02/2013 01-09-2013: Type Ratings Icu Icu Unit RateDocument7 pagesPrice List PL-02/2013 01-09-2013: Type Ratings Icu Icu Unit RatepogisimpatikoNo ratings yet
- TESTRANO 600 Getting Started ENUDocument44 pagesTESTRANO 600 Getting Started ENUAitor LarrenNo ratings yet
- ELMARK Electrical 2014 WEBda3Document232 pagesELMARK Electrical 2014 WEBda3lolololo2000No ratings yet
- Build Your Own Doug Coil Machine Part 2Document70 pagesBuild Your Own Doug Coil Machine Part 2Jason Verbelli100% (5)
- Users Manual SDP-Eco 1630III - GB PDFDocument83 pagesUsers Manual SDP-Eco 1630III - GB PDFBill SimpsonNo ratings yet
- MikroskopDocument88 pagesMikroskopJ FadliNo ratings yet
- Tle ReportDocument30 pagesTle ReportEmyl FeguroNo ratings yet
- Cargador LobatoDocument0 pagesCargador LobatoreloquitopiNo ratings yet
- Beam Smoke Detector: Technical DescriptionDocument25 pagesBeam Smoke Detector: Technical Descriptionslaven jevtovicNo ratings yet
- Pever MauldinDocument22 pagesPever Mauldinzae nurdin100% (1)
- MK 1000 ADocument4 pagesMK 1000 AAli AhmadNo ratings yet
- Plano Electrico 785cDocument2 pagesPlano Electrico 785cjuan carlos usuriaga felixNo ratings yet
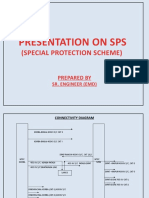
- Presentation On SPS: (Special Protection Scheme)Document9 pagesPresentation On SPS: (Special Protection Scheme)Abhishek SinhaNo ratings yet
- 3KVC sets with 3 vertical pumpsDocument2 pages3KVC sets with 3 vertical pumpsHazem HassonNo ratings yet