You might also like
- Department of Electrical EngineeringDocument12 pagesDepartment of Electrical EngineeringMohd Shahrul EffendiNo ratings yet
- PLC ApplicationDocument56 pagesPLC ApplicationMohamed Gawad ARaya88% (8)
- Application Examples of Basic Commands: I/O AssignmentDocument10 pagesApplication Examples of Basic Commands: I/O AssignmentDjokataNo ratings yet
- Windows 1256''Plc ApplicationDocument56 pagesWindows 1256''Plc ApplicationAlaa Faiq0% (1)
- PLC 3Document22 pagesPLC 3api-3760396No ratings yet
- Chapter 4 PLC Programming (New)Document55 pagesChapter 4 PLC Programming (New)Navinneish Krishnan100% (1)
- Lab 4 (PLC)Document7 pagesLab 4 (PLC)samu1991tan100% (1)
- PLC Project ReportDocument18 pagesPLC Project ReportMayowaNo ratings yet
- PLC Automation Problems SolvedDocument9 pagesPLC Automation Problems SolvedYayachew MandefroNo ratings yet
- PLC SlidesDocument46 pagesPLC SlidesdonatchangeNo ratings yet
- Ladder Diagram Timer and Counter: PLT 307 - Programmable Logic ControllerDocument18 pagesLadder Diagram Timer and Counter: PLT 307 - Programmable Logic Controllerbeselamu0% (1)
- PLC-work Book - 19 - 05 - 2018Document12 pagesPLC-work Book - 19 - 05 - 2018Zahoor AbbasNo ratings yet
- PLC ProjectDocument69 pagesPLC Projectsovon adhikaryNo ratings yet
- PLC COUNTER PROBLEMSDocument7 pagesPLC COUNTER PROBLEMSZim ShahNo ratings yet
- Workbook PLCDocument16 pagesWorkbook PLCkhairul fahmiNo ratings yet
- PLC Training Kit Omron CPM1ADocument1 pagePLC Training Kit Omron CPM1Alaihingkok9071No ratings yet
- Programming Industrial Automation Laboratory Manual 2021-22Document60 pagesProgramming Industrial Automation Laboratory Manual 2021-22Insane PersonNo ratings yet
- PLC Application Exercises and Solutions for Industrial Automation TrainingDocument93 pagesPLC Application Exercises and Solutions for Industrial Automation TrainingMuhammadSyafiuddin100% (1)
- PLC & Pneumatic SystemDocument38 pagesPLC & Pneumatic SystemArjun Pratap Singh88% (8)
- PLC - L1Document25 pagesPLC - L1MASOUDNo ratings yet
- Omron PLCDocument253 pagesOmron PLCvthiseasNo ratings yet
- Unit 4Document68 pagesUnit 4Abdul MuhaiminNo ratings yet
- PLC ScadaDocument7 pagesPLC Scadadorababu2007No ratings yet
- Programmable Logic Controllers: Richard A. WyskDocument49 pagesProgrammable Logic Controllers: Richard A. WyskreliableplacementNo ratings yet
- Here is the PLC ladder logic diagram to meet the given requirements:1 2 3 4 5 6 7 8| | | | | | | |K1-NO LED Green|K2-NO|LED Red|K1-NC|K2-NCDocument116 pagesHere is the PLC ladder logic diagram to meet the given requirements:1 2 3 4 5 6 7 8| | | | | | | |K1-NO LED Green|K2-NO|LED Red|K1-NC|K2-NCABHISHEK THAKURNo ratings yet
- Sfere Dts1946-t Energy MeterDocument5 pagesSfere Dts1946-t Energy Metersujingthet50% (2)
- Programmable Logic Controller Programmable Logic Controller: Course IE-447Document81 pagesProgrammable Logic Controller Programmable Logic Controller: Course IE-447Anas Tounsi100% (1)
- 05 - DC Motor Control Using PLCDocument49 pages05 - DC Motor Control Using PLCKoppoju PadmaNo ratings yet
- 3way Traffic Light Ladder LogicDocument5 pages3way Traffic Light Ladder LogicM. Umair WaheedNo ratings yet
- Salzer Catelouge1 PDFDocument32 pagesSalzer Catelouge1 PDFnitin hadkeNo ratings yet
- Basics of PLCDocument49 pagesBasics of PLCANAMIKA BHARALINo ratings yet
- Learn PLC Programming with 100+ Video TutorialsDocument93 pagesLearn PLC Programming with 100+ Video TutorialsTrung100% (1)
- Chapter 4 - ProgrammingDocument58 pagesChapter 4 - ProgrammingMOHD SABREENo ratings yet
- Lab 1: PLC Hardware FamiliarizationDocument5 pagesLab 1: PLC Hardware FamiliarizationTee CubeNo ratings yet
- Logo! Practical TrainingDocument9 pagesLogo! Practical Trainingعثمان الاغبزيNo ratings yet
- Chapter22 PLC Connecting GuideDocument149 pagesChapter22 PLC Connecting Guidezeropoint_romeoNo ratings yet
- Formula ElektrikDocument0 pagesFormula ElektriksofyanshahNo ratings yet
- Motor Control FundamentalsDocument4 pagesMotor Control FundamentalsJamesdomingoNo ratings yet
- PLCDocument30 pagesPLCAnkit ShuklaNo ratings yet
- Timers and Counters Instruction PLC TutorialDocument26 pagesTimers and Counters Instruction PLC TutorialAlpha75% (4)
- Introduction To PLC PresentationDocument214 pagesIntroduction To PLC Presentationtharindu100% (3)
- 02 Power Transformer#Document9 pages02 Power Transformer#aimizaNo ratings yet
- Plc+LectureDocument82 pagesPlc+LectureJerone CastilloNo ratings yet
- Logic Design Seminar - Programmable Logic ControllersDocument35 pagesLogic Design Seminar - Programmable Logic Controllersabhisingh28No ratings yet
- 5 PLC PDFDocument31 pages5 PLC PDFshihabNo ratings yet
- RS Logix 5000Document16 pagesRS Logix 5000Mohammad M HossainNo ratings yet
- Project Report: PLC & ScadaDocument44 pagesProject Report: PLC & ScadaAhmed SamiNo ratings yet
- Ls Mop3 230Document3 pagesLs Mop3 230aglopez10No ratings yet
- Hunter 15317164Document214 pagesHunter 15317164Jose CasasNo ratings yet
- Application Examples of Basic CommandsDocument10 pagesApplication Examples of Basic CommandsDjokataNo ratings yet
- FC105Document17 pagesFC105Hoangvinh DuongNo ratings yet
- CW5045Document6 pagesCW5045haikalNo ratings yet
- Auto Tune For InductionDocument2 pagesAuto Tune For InductiontoufikNo ratings yet
- 7VK610Document6 pages7VK610Afsar AliNo ratings yet
- Mechatro Hand Book Geospec PDFDocument76 pagesMechatro Hand Book Geospec PDFtaufiqharto100% (6)
- B-65270EN - 08-αi seriesβi series, LINEAR MOTOR LiS series PARAMETER MANUALDocument9 pagesB-65270EN - 08-αi seriesβi series, LINEAR MOTOR LiS series PARAMETER MANUALQuyen VuongNo ratings yet
- MP-BH-.... - .: Instructions For Use, Návod K PoužitíDocument40 pagesMP-BH-.... - .: Instructions For Use, Návod K PoužitíJonathan SolorzaNo ratings yet
- 138SiemensE02+R24F501 7VK611BreakerPDocument5 pages138SiemensE02+R24F501 7VK611BreakerPJonasNo ratings yet
- Sip5 Bcu SettingsDocument7 pagesSip5 Bcu Settingskarthik kanchiNo ratings yet
- HeaderDocument10 pagesHeaderDjokata0% (1)
- CopyrightDocument1 pageCopyrightDjokataNo ratings yet
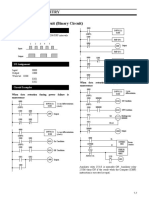
- Useful Circuitry Push-On/Push-Off Circuit (Binary Circuit)Document10 pagesUseful Circuitry Push-On/Push-Off Circuit (Binary Circuit)DjokataNo ratings yet
- Application Examples of Basic Commands: OperationDocument11 pagesApplication Examples of Basic Commands: OperationDjokataNo ratings yet
- Chap 9.1Document7 pagesChap 9.1DjokataNo ratings yet
- Useful Circuitry: 16-Point Non-Lock-In AnnunicatorDocument6 pagesUseful Circuitry: 16-Point Non-Lock-In AnnunicatorDjokataNo ratings yet
- ContentDocument3 pagesContentDjokataNo ratings yet
- Chap 8.1Document6 pagesChap 8.1DjokataNo ratings yet
- Useful Circuitry 1 - Cycle Differentiation CircuitDocument6 pagesUseful Circuitry 1 - Cycle Differentiation CircuitDjokataNo ratings yet
- Application Examples of Basic CommandsDocument9 pagesApplication Examples of Basic CommandsDjokataNo ratings yet
- Application Examples of Basic Commands Example: Ball Sorter MechanismDocument5 pagesApplication Examples of Basic Commands Example: Ball Sorter MechanismDjokataNo ratings yet
- Application Examples of Basic Commands On and Off Delay CircuitDocument10 pagesApplication Examples of Basic Commands On and Off Delay CircuitDjokata100% (1)
- Application Examples of Basic CommandsDocument10 pagesApplication Examples of Basic CommandsDjokataNo ratings yet
- Chap 5.1Document9 pagesChap 5.1DjokataNo ratings yet
- Chap 6.1Document11 pagesChap 6.1DjokataNo ratings yet
- Unit Specifications and Components General Specifications of Cpm1A Cpus UnitDocument15 pagesUnit Specifications and Components General Specifications of Cpm1A Cpus UnitDjokataNo ratings yet
- Application Examples of Basic Commands: ExampleDocument11 pagesApplication Examples of Basic Commands: ExampleDjokataNo ratings yet
- Chap 3.1Document17 pagesChap 3.1DjokataNo ratings yet
- Chap 2.2Document2 pagesChap 2.2DjokataNo ratings yet
- Appendix E-PC Setup CPM1A PC Setup SettingsDocument10 pagesAppendix E-PC Setup CPM1A PC Setup SettingsDjokataNo ratings yet
- Chap 2.1Document24 pagesChap 2.1DjokataNo ratings yet
- Appendix C-Programming Instructions Instruction Available in CPM1A and CPM2A Sequence InstructionsDocument10 pagesAppendix C-Programming Instructions Instruction Available in CPM1A and CPM2A Sequence InstructionsDjokataNo ratings yet
- Chap 1.2Document11 pagesChap 1.2DjokataNo ratings yet
- Appendix D-Memory Areas CPM1A Memory Area Functions Memory Area StructureDocument15 pagesAppendix D-Memory Areas CPM1A Memory Area Functions Memory Area StructureDjokataNo ratings yet
- Appendix A-Standard Models Standard ModelsDocument3 pagesAppendix A-Standard Models Standard ModelsDjokataNo ratings yet
- Chap 1.1Document11 pagesChap 1.1DjokataNo ratings yet
- APPENDBDocument10 pagesAPPENDBDjokataNo ratings yet
- Flexible Regression and Smoothing - Using GAMLSS in RDocument572 pagesFlexible Regression and Smoothing - Using GAMLSS in RDavid50% (2)
- Nokia CaseDocument28 pagesNokia CaseErykah Faith PerezNo ratings yet
- Arta Kelmendi's resume highlighting education and work experienceDocument2 pagesArta Kelmendi's resume highlighting education and work experienceArta KelmendiNo ratings yet
- Test Bank For Fundamental Financial Accounting Concepts 10th by EdmondsDocument18 pagesTest Bank For Fundamental Financial Accounting Concepts 10th by Edmondsooezoapunitory.xkgyo4100% (47)
- Astm D7928 - 17Document25 pagesAstm D7928 - 17shosha100% (2)
- Exercise-01: JEE-PhysicsDocument52 pagesExercise-01: JEE-Physicsjk rNo ratings yet
- CTR Ball JointDocument19 pagesCTR Ball JointTan JaiNo ratings yet
- PHY210 Mechanism Ii and Thermal Physics Lab Report: Faculty of Applied Sciences Uitm Pahang (Jengka Campus)Document13 pagesPHY210 Mechanism Ii and Thermal Physics Lab Report: Faculty of Applied Sciences Uitm Pahang (Jengka Campus)Arissa SyaminaNo ratings yet
- Journals OREF Vs ORIF D3rd RadiusDocument9 pagesJournals OREF Vs ORIF D3rd RadiusironNo ratings yet
- Prac Res Q2 Module 1Document14 pagesPrac Res Q2 Module 1oea aoueoNo ratings yet
- Form Active Structure TypesDocument5 pagesForm Active Structure TypesShivanshu singh100% (1)
- Dermatology Study Guide 2023-IvDocument7 pagesDermatology Study Guide 2023-IvUnknown ManNo ratings yet
- Srimanta Sankaradeva Universityof Health SciencesDocument3 pagesSrimanta Sankaradeva Universityof Health SciencesTemple RunNo ratings yet
- Analyze and Design Sewer and Stormwater Systems with SewerGEMSDocument18 pagesAnalyze and Design Sewer and Stormwater Systems with SewerGEMSBoni ClydeNo ratings yet
- SEC QPP Coop TrainingDocument62 pagesSEC QPP Coop TrainingAbdalelah BagajateNo ratings yet
- NABARD road inspection report formatDocument24 pagesNABARD road inspection report formatSrinivas PNo ratings yet
- Letter From Attorneys General To 3MDocument5 pagesLetter From Attorneys General To 3MHonolulu Star-AdvertiserNo ratings yet
- Unr Ece R046Document74 pagesUnr Ece R046rianteri1125No ratings yet
- Human Rights Alert: Corrective Actions in Re: Litigation Involving Financial InstitutionsDocument3 pagesHuman Rights Alert: Corrective Actions in Re: Litigation Involving Financial InstitutionsHuman Rights Alert - NGO (RA)No ratings yet
- Cell Organelles ColoringDocument2 pagesCell Organelles ColoringThomas Neace-FranklinNo ratings yet
- EA Linear RegressionDocument3 pagesEA Linear RegressionJosh RamosNo ratings yet
- IELTS Speaking Q&ADocument17 pagesIELTS Speaking Q&ABDApp Star100% (1)
- Civil Service Exam Clerical Operations QuestionsDocument5 pagesCivil Service Exam Clerical Operations QuestionsJeniGatelaGatillo100% (3)
- A Princess of Mars Part 3Document4 pagesA Princess of Mars Part 3Sheila Inca100% (1)
- CBSE Class 6 Whole Numbers WorksheetDocument2 pagesCBSE Class 6 Whole Numbers WorksheetPriyaprasad PandaNo ratings yet
- EC GATE 2017 Set I Key SolutionDocument21 pagesEC GATE 2017 Set I Key SolutionJeevan Sai MaddiNo ratings yet
- Gabinete STS Activity1Document2 pagesGabinete STS Activity1Anthony GabineteNo ratings yet
- Galaxy Owners Manual Dx98vhpDocument10 pagesGalaxy Owners Manual Dx98vhpbellscbNo ratings yet
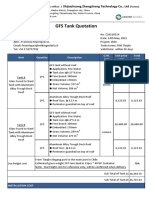
- GFS Tank Quotation C20210514Document4 pagesGFS Tank Quotation C20210514Francisco ManriquezNo ratings yet
- Role of PAODocument29 pagesRole of PAOAjay DhokeNo ratings yet