You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Disruptive Technology: Hypersonic PropulsionDocument23 pagesDisruptive Technology: Hypersonic Propulsion2495MPnetNo ratings yet
- R4.Passive Voice FutureDocument2 pagesR4.Passive Voice FutureMonica Santiago100% (1)
- EASA Part 66 ConsolidatDocument237 pagesEASA Part 66 ConsolidatBogdan Bobocea100% (1)
- Dragon Lab Fact SheetDocument37 pagesDragon Lab Fact Sheetjacobian18No ratings yet
- Problems Kinemaics 1 DDocument1 pageProblems Kinemaics 1 DIqbal A MirNo ratings yet
- Tiago Flores 2021-10-28Document51 pagesTiago Flores 2021-10-28Muhammad SohailNo ratings yet
- Cost Index: Fuel Conservation Tool for AirlinesDocument3 pagesCost Index: Fuel Conservation Tool for AirlinesAnshu KumarNo ratings yet
- A Deepness in The Sky by Vernor Vinge ExtractDocument33 pagesA Deepness in The Sky by Vernor Vinge ExtractOrion Publishing Group100% (1)
- Flying Paper f22 RaptorDocument4 pagesFlying Paper f22 Raptoramier hasanNo ratings yet
- Cryogenic Rocket Engine Development at Delft Aerospace Rocket EngineeringDocument13 pagesCryogenic Rocket Engine Development at Delft Aerospace Rocket EngineeringAlexyz33No ratings yet
- Gates Piaggio GP 180Document2 pagesGates Piaggio GP 180aeroengineer1100% (1)
- DgcaDocument4 pagesDgcaborn2fly_sky100% (1)
- GDJP Question BankDocument56 pagesGDJP Question BankRavindiran ChinnasamyNo ratings yet
- Passive Flow Control in Liquid-Propellant Rocket Engines With Cavitating VenturiDocument5 pagesPassive Flow Control in Liquid-Propellant Rocket Engines With Cavitating VenturilavanyaNo ratings yet
- JSF Data SheetDocument2 pagesJSF Data SheetManuel SolisNo ratings yet
- Rocket Height Prediction SpreadsheetDocument5 pagesRocket Height Prediction Spreadsheetapi-251710818No ratings yet
- Thrust Into Space PDFDocument125 pagesThrust Into Space PDFruslanagNo ratings yet
- A Wood Propeller For Your HomebuiltDocument3 pagesA Wood Propeller For Your HomebuiltRicardo VilhenaNo ratings yet
- Linethrower 250 Pains WessexDocument2 pagesLinethrower 250 Pains WessexAntonio Clas100% (2)
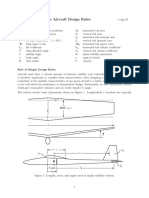
- Lab 8 Notes - Basic Aircraft Design Rules: H V H V H H VDocument8 pagesLab 8 Notes - Basic Aircraft Design Rules: H V H V H H VRia Jiot100% (1)
- 8005Document12 pages8005charangudlaNo ratings yet
- Faa Approach Plates PDFDocument2 pagesFaa Approach Plates PDFDanielNo ratings yet
- A Project OnDocument29 pagesA Project OnDhiraj ShindeNo ratings yet
- Cessna182 Training - Manual PDFDocument36 pagesCessna182 Training - Manual PDFalexis juarezNo ratings yet
- Development and Test of The LOX-LNG Regenerative Cooled Rocket EngineDocument4 pagesDevelopment and Test of The LOX-LNG Regenerative Cooled Rocket EnginePabloreimonteNo ratings yet
- Calculating Success: The Story of Katherine Johnson/TITLEDocument177 pagesCalculating Success: The Story of Katherine Johnson/TITLENidafe VillasNo ratings yet
- MSB96 10BDocument2 pagesMSB96 10BdzakubNo ratings yet
- Moonwalk 1.5Document1 pageMoonwalk 1.5eshachoukseNo ratings yet
- Fuselage Layout: ObjectiveDocument16 pagesFuselage Layout: ObjectiveRenier Dela RosaNo ratings yet
- M.E. Aero PDFDocument38 pagesM.E. Aero PDFMohamed IbrahimNo ratings yet