You might also like
- Resumen El Arte de Ser Rentable Una EmpresaDocument12 pagesResumen El Arte de Ser Rentable Una EmpresaOmar Santiago Chaparro Sierra100% (2)
- Las Fuentes de La Teología CuestionarioDocument10 pagesLas Fuentes de La Teología CuestionarioFrancisco FJNo ratings yet
- Reformulacion PedroDocument4 pagesReformulacion PedroCarlos Joao FloresNo ratings yet
- Cuadrante Del DineroDocument12 pagesCuadrante Del DineroMichael MenesesNo ratings yet
- Poemas de Marçal Font I - HuirDocument1 pagePoemas de Marçal Font I - HuirMabel RodriguezNo ratings yet
- Periscopio Casero TripticoDocument2 pagesPeriscopio Casero TripticoMayra Alexandra Castro Arana100% (1)
- El Cuerpo Humano en El Arte EgipcioDocument41 pagesEl Cuerpo Humano en El Arte EgipcioNatalia La NatillaNo ratings yet
- Fuera Del Drama. Fernanda Del MonteDocument3 pagesFuera Del Drama. Fernanda Del MonteDulce GuzmánNo ratings yet
- Comparación Entre El Código Civil de Vélez y El Nuevo Código Civil y Comercial. Cuestiones de MatrimonioDocument2 pagesComparación Entre El Código Civil de Vélez y El Nuevo Código Civil y Comercial. Cuestiones de MatrimonioJuanjo IbañezNo ratings yet
- Actividad 2 Morfo..Document23 pagesActividad 2 Morfo..Keren PerdomoNo ratings yet
- El Cuerpo Humano Parte 2Document39 pagesEl Cuerpo Humano Parte 2Alex GutiNo ratings yet
- Actividad #3, Movimiento PendularDocument5 pagesActividad #3, Movimiento Pendularjaime martinezNo ratings yet
- Teoría de La ComunicaciónDocument43 pagesTeoría de La ComunicaciónDayana Barrionuevo100% (1)
- Tarea 4 - NorbeyChaparroDocument7 pagesTarea 4 - NorbeyChaparroNorbey Sebastian Chaparro MezaNo ratings yet
- Examen Juan SaavedraDocument3 pagesExamen Juan SaavedraJuan Saavedra GuillenNo ratings yet
- 8° Actv. #4 Tercer Periodo - 2021Document4 pages8° Actv. #4 Tercer Periodo - 2021Parra Angelica 8-3No ratings yet
- Guia MedicionesDocument12 pagesGuia MedicionesAlvaro Jose Mosquera S.No ratings yet
- BBW Cien Contactos Gratis. Madera Mujer Casada Profesor California Citas?Document3 pagesBBW Cien Contactos Gratis. Madera Mujer Casada Profesor California Citas?waggishtwaddle993No ratings yet
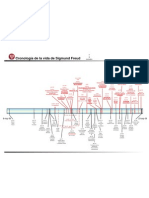
- Cronología FreudDocument1 pageCronología FreudhotmailrNo ratings yet
- Analisis LiteraturaDocument177 pagesAnalisis LiteraturaChema Mora100% (1)
- Comparar y Contrastar La Política Exterior de Hitler y Mussolini Hasta El Estallido de La Segunda Guerra MundialDocument1 pageComparar y Contrastar La Política Exterior de Hitler y Mussolini Hasta El Estallido de La Segunda Guerra MundialBryan Locotronic Toala100% (1)
- Resumen Deus Caritas EstDocument2 pagesResumen Deus Caritas Estmiki_clon60% (5)
- Tarea s13 Nuevo-1Document4 pagesTarea s13 Nuevo-1Brandon Calef Alain Estrada Martinez0% (1)
- Desarrollo MotorDocument12 pagesDesarrollo MotorMELISSA MAIRETH PEãA LEONESNo ratings yet
- 01 IntroDocument16 pages01 IntroValeria PaezNo ratings yet
- Programación Cneb 3º Arte y Cultura - 2024Document13 pagesProgramación Cneb 3º Arte y Cultura - 2024victor100% (1)
- ANTIVALORESDocument6 pagesANTIVALORESAlbertoSanchezNo ratings yet
- G9B1C3 Criterios de Congruencia y SemejanzaDocument6 pagesG9B1C3 Criterios de Congruencia y SemejanzaSergio Omar CastroNo ratings yet
- Contestación A Unas PreguntasDocument109 pagesContestación A Unas Preguntasantoniosantana6No ratings yet
- Biodisel Por AceiteDocument111 pagesBiodisel Por AceiteLuis Leonardo Llanos EscobarNo ratings yet