You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- 530 - Airflow Switch DataDocument1 page530 - Airflow Switch DataShahrukh AnsariNo ratings yet
- HandBook FDR 3G EX (EN) 2021-04-27Document48 pagesHandBook FDR 3G EX (EN) 2021-04-27Shahrukh AnsariNo ratings yet
- Project Detail Navis File Linked Revit Model: Item1 Item2Document1 pageProject Detail Navis File Linked Revit Model: Item1 Item2Shahrukh AnsariNo ratings yet
- HVAC Data Center Planning UpdateDocument3 pagesHVAC Data Center Planning UpdateShahrukh AnsariNo ratings yet
- Filter DatasheetDocument2 pagesFilter DatasheetShahrukh AnsariNo ratings yet
- Systems Design ReportDocument6 pagesSystems Design ReportShahrukh AnsariNo ratings yet
- Qew CRDocument1 pageQew CRShahrukh AnsariNo ratings yet
- Ramp Sump South Portal Fire & Smoke Damper ScheduleDocument1 pageRamp Sump South Portal Fire & Smoke Damper ScheduleShahrukh AnsariNo ratings yet
- Instruction Manual in Line Duct Flame Arrestor North America Only Fisher en 123970Document4 pagesInstruction Manual in Line Duct Flame Arrestor North America Only Fisher en 123970Shahrukh AnsariNo ratings yet
- Measuring Fire Loads and Calculating SeverityDocument14 pagesMeasuring Fire Loads and Calculating Severitykermech21607No ratings yet
- STT - South Tunnel - HVAC Calculations XDocument18 pagesSTT - South Tunnel - HVAC Calculations XShahrukh AnsariNo ratings yet
- TD-ATEX Series: In-Line Mixed Flow Duct Explosion Proof FansDocument4 pagesTD-ATEX Series: In-Line Mixed Flow Duct Explosion Proof FansShahrukh AnsariNo ratings yet
- Pipe Sizing ASHRAE For WaterDocument6 pagesPipe Sizing ASHRAE For Watertaufany99No ratings yet
- Merv Rating Chart PDFDocument1 pageMerv Rating Chart PDFShahrukh AnsariNo ratings yet
- TCS K 10001 R0 PDFDocument38 pagesTCS K 10001 R0 PDFShahrukh AnsariNo ratings yet
- Basic Valve Hydraulics IllustrationDocument4 pagesBasic Valve Hydraulics IllustrationShahrukh AnsariNo ratings yet
- TCS K 10001 R0 PDFDocument38 pagesTCS K 10001 R0 PDFShahrukh AnsariNo ratings yet
- Technical Report HVACDocument1 pageTechnical Report HVACShahrukh AnsariNo ratings yet
- Attachment 17 BDocument1 pageAttachment 17 BShahrukh AnsariNo ratings yet
- Stairwell & Lift Pressurization CalculationsDocument31 pagesStairwell & Lift Pressurization CalculationsAneng2890% (10)
- 2-Way & 3-WayDocument4 pages2-Way & 3-WayShahrukh AnsariNo ratings yet
- DYA (R-410A) Series - AHU CatalogueDocument21 pagesDYA (R-410A) Series - AHU CatalogueShahrukh AnsariNo ratings yet
- Chilled Water Brochure K-FlexDocument12 pagesChilled Water Brochure K-FlexADsupermanNo ratings yet
- General Specification: Building Services Branch Architectural Services DepartmentDocument220 pagesGeneral Specification: Building Services Branch Architectural Services DepartmentdvtherionNo ratings yet
- HVAC Psychrometrics & Coil CalculationsDocument8 pagesHVAC Psychrometrics & Coil CalculationsMohamed RiyaazNo ratings yet
- Climate ZoneDocument77 pagesClimate ZoneShahrukh AnsariNo ratings yet
- Fluid Mechanics - Hydrostatics: AP Physics BDocument19 pagesFluid Mechanics - Hydrostatics: AP Physics BAnjanaya LamaniNo ratings yet
- Lecture Guidelines IBMS BoQDocument13 pagesLecture Guidelines IBMS BoQvijayxkumarNo ratings yet
- 12 Pipe SizingDocument27 pages12 Pipe SizingVijay RajaindranNo ratings yet
- Pipe Insulation ThicknessDocument1 pagePipe Insulation ThicknessShahrukh AnsariNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Giljang - Bsn2-A10 - Sas 1-3Document7 pagesGiljang - Bsn2-A10 - Sas 1-3Cherylen Casul GiljangNo ratings yet
- CHM 127 Exp 1Document4 pagesCHM 127 Exp 1shelby hartwigNo ratings yet
- Click To Edit Master Title Style: Uggas, Heinz Gerhard A. Sabroso, Dionisio Jr. L. Reyes, Jeboy ODocument21 pagesClick To Edit Master Title Style: Uggas, Heinz Gerhard A. Sabroso, Dionisio Jr. L. Reyes, Jeboy ODionisio SabrosoNo ratings yet
- Penomoran Bantex - K64&COMPDocument8 pagesPenomoran Bantex - K64&COMPVigour Rizko MurdyneNo ratings yet
- Chemistry 101 - The Complete Notes - Joliet Junior College (PDFDrive)Document226 pagesChemistry 101 - The Complete Notes - Joliet Junior College (PDFDrive)Kabwela MwapeNo ratings yet
- Media Effects TheoriesDocument6 pagesMedia Effects TheoriesHavie Joy SiguaNo ratings yet
- Pnas 1703856114Document5 pagesPnas 1703856114pi. capricorniNo ratings yet
- Dball-Gm5 en Ig Cp20110328aDocument18 pagesDball-Gm5 en Ig Cp20110328aMichael MartinezNo ratings yet
- An Introduction To Community DevelopmentDocument21 pagesAn Introduction To Community DevelopmentThuyAnh NgnNo ratings yet
- Tutorial Sim MechanicsDocument840 pagesTutorial Sim MechanicsHernan Gonzalez100% (4)
- SO CF, Internal Fault Map Class 1A SO CF, Internal Fault Map Class 2A SO CF, External Condition Map Class 1BDocument15 pagesSO CF, Internal Fault Map Class 1A SO CF, Internal Fault Map Class 2A SO CF, External Condition Map Class 1BATMMOBILISNo ratings yet
- AR Adjustments: Details, Setup, Flow, Accounting and API: September 5th, 2008Document5 pagesAR Adjustments: Details, Setup, Flow, Accounting and API: September 5th, 2008John SmithNo ratings yet
- Main Sulci & Fissures: Cerebral FissureDocument17 pagesMain Sulci & Fissures: Cerebral FissureNagbhushan BmNo ratings yet
- Demand Performa For Annual DemandDocument10 pagesDemand Performa For Annual DemandpushpNo ratings yet
- U-PJT WASHER-MD SimpleUX WEB SSEC-01 EU EnglishDocument76 pagesU-PJT WASHER-MD SimpleUX WEB SSEC-01 EU EnglishszerenguettiNo ratings yet
- 6 Main Rotor Config DesignDocument44 pages6 Main Rotor Config DesignDeepak Paul TirkeyNo ratings yet
- CLOZE TEST Fully Revised For SSC, Bank Exams & Other CompetitiveDocument57 pagesCLOZE TEST Fully Revised For SSC, Bank Exams & Other CompetitiveSreenu Raju100% (2)
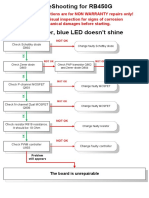
- RB450G Trouble ShootingDocument9 pagesRB450G Trouble Shootingjocimar1000No ratings yet
- Detect Plant Diseases Using Image ProcessingDocument11 pagesDetect Plant Diseases Using Image Processingvinayak100% (1)
- Mohammad Abu-Radi ResumeDocument4 pagesMohammad Abu-Radi ResumeMohammad Abu-RadiNo ratings yet
- Individual Moving Range (I-MR) Charts ExplainedDocument18 pagesIndividual Moving Range (I-MR) Charts ExplainedRam Ramanathan0% (1)
- Spectro Xepos Brochure 2016Document8 pagesSpectro Xepos Brochure 2016Mary100% (1)
- Giraffe Juice GamesDocument32 pagesGiraffe Juice Gamesgwyn022100% (3)
- 199-Article Text-434-1-10-20200626Document11 pages199-Article Text-434-1-10-20200626ryan renaldiNo ratings yet
- CA Module Franklin Gari RDocument28 pagesCA Module Franklin Gari RFranklin GariNo ratings yet
- Ethanol: Safety Data SheetDocument19 pagesEthanol: Safety Data SheetNitika SinhaNo ratings yet
- Column and Thin Layer ChromatographyDocument5 pagesColumn and Thin Layer Chromatographymarilujane80% (5)
- Limits, Fits and Tolerances: Prof. S. S. PandeDocument31 pagesLimits, Fits and Tolerances: Prof. S. S. PandeM PankajNo ratings yet
- Chemical Engineering Assignment SubmissionDocument10 pagesChemical Engineering Assignment SubmissionFahad KamranNo ratings yet