You might also like
- Conditions of EquilibriumDocument3 pagesConditions of EquilibriumAshutosh KumarNo ratings yet
- THE BASIC LIFT EQUATIONDocument5 pagesTHE BASIC LIFT EQUATIONAshutosh KumarNo ratings yet
- SFD & BMD Over Aircraft WingDocument5 pagesSFD & BMD Over Aircraft WingPrajeesh RajNo ratings yet
- SFD & BMD Over Aircraft WingDocument5 pagesSFD & BMD Over Aircraft WingPrajeesh RajNo ratings yet
- Aircraft Structure 2013 FEATIDocument36 pagesAircraft Structure 2013 FEATIAira HernandezNo ratings yet
- Conditions of EquilibriumDocument1 pageConditions of EquilibriumAshutosh KumarNo ratings yet
- Conditions of EquilibriumDocument2 pagesConditions of EquilibriumAshutosh KumarNo ratings yet
- Wind Tunnel.Document19 pagesWind Tunnel.Briton Herbert AdrianNo ratings yet
- Forces Acting On An AircraftDocument11 pagesForces Acting On An AircraftRajesh KumarNo ratings yet
- Analysis of Vertical Vessels Supported on LegsDocument6 pagesAnalysis of Vertical Vessels Supported on Legssonali panditNo ratings yet
- Mom Unit - 6 SFD BMDDocument15 pagesMom Unit - 6 SFD BMDDasiVNPotharajuNo ratings yet
- Chap 5 - Flight StabilityDocument52 pagesChap 5 - Flight Stabilitydada1020chapmanNo ratings yet
- ASC-mod 3-Dynamic Longitudinal StabilityDocument32 pagesASC-mod 3-Dynamic Longitudinal StabilityJason JeevanNo ratings yet
- Influence of LinesDocument15 pagesInfluence of LinesAyoola OluwadotunNo ratings yet
- Weight & Balance (16 Aug 08)Document100 pagesWeight & Balance (16 Aug 08)aftab_sweet3024No ratings yet
- Stability of A Floating BodyDocument11 pagesStability of A Floating BodyAbdur RehmanNo ratings yet
- Verify Law of Moments Using Bell-Crank LeverDocument6 pagesVerify Law of Moments Using Bell-Crank LeverAkankshaNo ratings yet
- Module 3 and 5 PDFDocument55 pagesModule 3 and 5 PDFSaptadip SahaNo ratings yet
- Engineering Mech (Presentation)Document53 pagesEngineering Mech (Presentation)Thomas Roy Cacho SantosNo ratings yet
- Engineering Mech (Presentation) 2Document66 pagesEngineering Mech (Presentation) 2Thomas Roy Cacho SantosNo ratings yet
- 13Document22 pages13E. Esli Cruz TovarNo ratings yet
- Engineering Mechanics I To III Units PDFDocument143 pagesEngineering Mechanics I To III Units PDFAnil KumarNo ratings yet
- Experiment (2) : Metacentric Height of Floating Bodies: Hydraulics Lab (ECIV 3122) Islamic University - Gaza (IUG)Document8 pagesExperiment (2) : Metacentric Height of Floating Bodies: Hydraulics Lab (ECIV 3122) Islamic University - Gaza (IUG)G Sri SoumyaNo ratings yet
- Mae 510: Final Exam Unlimited Time: Due A Week From Start Time Question #1Document2 pagesMae 510: Final Exam Unlimited Time: Due A Week From Start Time Question #1Vipin NairNo ratings yet
- Measuring Force, Torque, and PowerDocument42 pagesMeasuring Force, Torque, and PowerMuluken FilmonNo ratings yet
- Es7 Lecture2 EquilibriumDocument12 pagesEs7 Lecture2 EquilibriumadobongmerlatNo ratings yet
- 8-Chapter 3 Text 2011Document50 pages8-Chapter 3 Text 2011medievoloNo ratings yet
- Static Mechanical System Section1: Stress, Shear Force and Bending MomentDocument17 pagesStatic Mechanical System Section1: Stress, Shear Force and Bending MomentHadhi Hassan KhanNo ratings yet
- Ae 6401 Aerodynamics1 Two MarksDocument13 pagesAe 6401 Aerodynamics1 Two MarksSun Heifer50% (2)
- Chapter 6 Equilibrium of A Rigid BodyDocument54 pagesChapter 6 Equilibrium of A Rigid BodyRyan Philip CatapangNo ratings yet
- Three-Piece Truck ModelDocument7 pagesThree-Piece Truck ModelMehdi TaheriNo ratings yet
- Internal Propulsion: Independent Research, Sambir, Lviv, 81473, UkraineDocument6 pagesInternal Propulsion: Independent Research, Sambir, Lviv, 81473, UkrainekolodrubNo ratings yet
- Mastering Physics Ch14Document12 pagesMastering Physics Ch14apuszis100% (1)
- Lab 3-Column BucklingDocument7 pagesLab 3-Column BucklingMr. Danish SaeedNo ratings yet
- L I::-.,: ,: L " j:'1.Document84 pagesL I::-.,: ,: L " j:'1.thermo2014No ratings yet
- AE2610 Lab HelicopterDocument12 pagesAE2610 Lab HelicopterRandom PersonNo ratings yet
- Physics Lab Report 5Document3 pagesPhysics Lab Report 5Catherine Linsley0% (1)
- Unit-5 Elements of Aeroelasticity by G.Velmurugan AP/AeroDocument21 pagesUnit-5 Elements of Aeroelasticity by G.Velmurugan AP/AeroveluNo ratings yet
- Mechanics Simple MachinesDocument17 pagesMechanics Simple MachineseetuaNo ratings yet
- Automatic Control II Hover V7Document22 pagesAutomatic Control II Hover V7Arsalan AhmadNo ratings yet
- 2.1 Displacement (External Load)Document40 pages2.1 Displacement (External Load)Adron Lim33% (3)
- Guide to Influence Lines for Statically Determinate StructuresDocument25 pagesGuide to Influence Lines for Statically Determinate StructuresNazmul Hasan100% (2)
- Flight, Manouver PerformanceDocument18 pagesFlight, Manouver PerformanceMuhammad Ali IdrisNo ratings yet
- More Applications of The Momentum EquationDocument8 pagesMore Applications of The Momentum EquationilhammkaNo ratings yet
- Asl AZ - Moghavemat 18Document44 pagesAsl AZ - Moghavemat 18eqranavidNo ratings yet
- VerticalJump (Linthorne)Document7 pagesVerticalJump (Linthorne)Ganeshkumar ManiNo ratings yet
- Physics 10Document17 pagesPhysics 10Shaheena YasmeenNo ratings yet
- Shear Force and Bending Moment Diagrams Due To Loads Along Chordwise DirectionDocument11 pagesShear Force and Bending Moment Diagrams Due To Loads Along Chordwise DirectionERÃŋkîtÇhàñdràkàrNo ratings yet
- Mechanical Vibration Analysis of a Simple PendulumDocument15 pagesMechanical Vibration Analysis of a Simple PendulumUsMan WarraichNo ratings yet
- Antifragility and Aircraft DesignDocument19 pagesAntifragility and Aircraft Designjose luis garnica tinajeroNo ratings yet
- Ae8008 Unit-I BasicsDocument17 pagesAe8008 Unit-I BasicsGEZHILMARANNo ratings yet
- CE 234A Mechanics of Deformable BodiesDocument67 pagesCE 234A Mechanics of Deformable BodiesMyzza S. SappayaniNo ratings yet
- ModelingandControlofX ShapeQuadcopterDocument13 pagesModelingandControlofX ShapeQuadcopterዮናስNo ratings yet
- Lab Session 4 MomDocument5 pagesLab Session 4 Momm.sheraz malikNo ratings yet
- AxesDocument1 pageAxesAmerigo ZamperNo ratings yet
- Model aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipFrom EverandModel aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipNo ratings yet
- The Book of Basic Machines: The U.S. Navy Training ManualFrom EverandThe Book of Basic Machines: The U.S. Navy Training ManualRating: 4 out of 5 stars4/5 (4)
- QAW1Document1 pageQAW1Ashutosh KumarNo ratings yet
- At 1Document1 pageAt 1Ashutosh KumarNo ratings yet
- Emily Schwartz Dallara February 2011Document1 pageEmily Schwartz Dallara February 2011Ashutosh KumarNo ratings yet
- 5 Fuselage and Tail Layout: 4.7 Areas of Flaps and AileronsDocument1 page5 Fuselage and Tail Layout: 4.7 Areas of Flaps and AileronsAshutosh KumarNo ratings yet
- TG 1Document1 pageTG 1Ashutosh KumarNo ratings yet
- SSN 1Document1 pageSSN 1Ashutosh KumarNo ratings yet
- WQ 1Document1 pageWQ 1Ashutosh KumarNo ratings yet
- TG 1Document1 pageTG 1Ashutosh KumarNo ratings yet
- Acknowledgements Xiii List of Acronyms XV Series Preface Xix 1Document1 pageAcknowledgements Xiii List of Acronyms XV Series Preface Xix 1Ashutosh KumarNo ratings yet
- Figure 2.27 Typical Accessory Gearbox: Hydraulic Pump Starter Lube and Scavenge Pump IDGDocument1 pageFigure 2.27 Typical Accessory Gearbox: Hydraulic Pump Starter Lube and Scavenge Pump IDGAshutosh KumarNo ratings yet
- 4.5 Wing Incidence (i) : C − α C C S SDocument1 page4.5 Wing Incidence (i) : C − α C C S SAshutosh KumarNo ratings yet
- Afdc1 PDFDocument1 pageAfdc1 PDFAshutosh KumarNo ratings yet
- Engine Control On Modern Civil Aircraft: Figure 2.30 Rolls Royce Trent 800 - Overview (Courtesy of Rolls Royce)Document1 pageEngine Control On Modern Civil Aircraft: Figure 2.30 Rolls Royce Trent 800 - Overview (Courtesy of Rolls Royce)Ashutosh KumarNo ratings yet
- Mission: Gust and Turbulence RequirementsDocument1 pageMission: Gust and Turbulence RequirementsAshutosh KumarNo ratings yet
- Acknowledgements Xiii List of Acronyms XV Series Preface Xix 1Document1 pageAcknowledgements Xiii List of Acronyms XV Series Preface Xix 1Ashutosh KumarNo ratings yet
- aircraft loading structural layout simulationDocument1 pageaircraft loading structural layout simulationAshutosh KumarNo ratings yet
- 1702Document1 page1702Ashutosh KumarNo ratings yet
- Cast Defect 01Document1 pageCast Defect 01Ashutosh KumarNo ratings yet
- xz1 PDFDocument1 pagexz1 PDFAshutosh KumarNo ratings yet
- V-N Diagram PDFDocument13 pagesV-N Diagram PDFmeku44No ratings yet
- As 01Document1 pageAs 01Ashutosh KumarNo ratings yet
- Aerostat Equilibrium and Enhancement ProjectDocument1 pageAerostat Equilibrium and Enhancement ProjectAshutosh KumarNo ratings yet
- Torsion of Solid Sections: Prandtl Stress Function SolutionDocument1 pageTorsion of Solid Sections: Prandtl Stress Function SolutionAshutosh KumarNo ratings yet
- xz02 PDFDocument1 pagexz02 PDFAshutosh KumarNo ratings yet
- qq1 PDFDocument2 pagesqq1 PDFAshutosh KumarNo ratings yet
- Cylindrical Contact Surfaces: For Cylinders in Contact, The Contact Patch Is Rectangular (Half-Width B)Document1 pageCylindrical Contact Surfaces: For Cylinders in Contact, The Contact Patch Is Rectangular (Half-Width B)Ashutosh KumarNo ratings yet
- Plate Buckling Analysis112 PDFDocument1 pagePlate Buckling Analysis112 PDFAshutosh KumarNo ratings yet
- As 03Document1 pageAs 03Ashutosh KumarNo ratings yet
- As01 PDFDocument1 pageAs01 PDFAshutosh KumarNo ratings yet
- Contact Stress Components of Spherical SurfacesDocument1 pageContact Stress Components of Spherical SurfacesAshutosh KumarNo ratings yet
- Multi Level Practice Test 5Document5 pagesMulti Level Practice Test 5Erkin SadikovNo ratings yet
- Subsistence Farming BangladeshDocument23 pagesSubsistence Farming BangladeshManenju NzokouNo ratings yet
- Intb265 - Skippy Analysis - Grace HakimDocument8 pagesIntb265 - Skippy Analysis - Grace Hakimapi-631688854No ratings yet
- GE8151 Python Programming Unit 3 Question Bank With Sample CodeDocument25 pagesGE8151 Python Programming Unit 3 Question Bank With Sample CodeN.VivekananthamoorthyNo ratings yet
- Arabia in The Pre-Islamic Period PDFDocument26 pagesArabia in The Pre-Islamic Period PDFRıdvan ÇeliközNo ratings yet
- CES EdupackDocument18 pagesCES EdupackShaheer MirzaNo ratings yet
- Project Report On BSNLDocument91 pagesProject Report On BSNLmanavNo ratings yet
- Nortel GSM Counters and MetricsDocument38 pagesNortel GSM Counters and Metricsadnan80_742No ratings yet
- El o Matic Posiflex Positioners en Us 6415414Document20 pagesEl o Matic Posiflex Positioners en Us 6415414Elvis RodriguezNo ratings yet
- Biology Revision Work Sheet Senior 1Document3 pagesBiology Revision Work Sheet Senior 1SOHAIRA AFZAALNo ratings yet
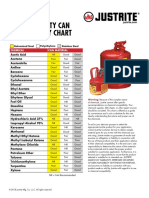
- Safety Can Chemical Compatibility ChartDocument1 pageSafety Can Chemical Compatibility ChartMan NamNo ratings yet
- Digital Logic Design: VHDL Coding For Fpgas Unit 6Document15 pagesDigital Logic Design: VHDL Coding For Fpgas Unit 6Srinivas CherukuNo ratings yet
- Flexible Cable Carriers and Protection Systems GuideDocument146 pagesFlexible Cable Carriers and Protection Systems Guidebachir diengNo ratings yet
- Sample Paper 01 - Dropper NEET 2024 - Botany - Raja Sir - Vijay Gupta - Questions 2Document7 pagesSample Paper 01 - Dropper NEET 2024 - Botany - Raja Sir - Vijay Gupta - Questions 2Raghuram SheshadriNo ratings yet
- Fault Detection of Gear Using Spectrum and CepstruDocument6 pagesFault Detection of Gear Using Spectrum and Cepstruराकेश झाNo ratings yet
- Assessment Form 10 (Collection and Analysis of Quantitative and Qualitative Data) 3Document8 pagesAssessment Form 10 (Collection and Analysis of Quantitative and Qualitative Data) 3Raymond RamirezNo ratings yet
- Universiti Tun Hussein Onn Malaysia Faculty of Mechanical and Manufacturing EngineeringDocument10 pagesUniversiti Tun Hussein Onn Malaysia Faculty of Mechanical and Manufacturing EngineeringAriff AliNo ratings yet
- Marketing PlanDocument23 pagesMarketing PlanmysamsoomNo ratings yet
- Module 1 Local History and GovernanceDocument71 pagesModule 1 Local History and GovernanceEamacir UlopganisNo ratings yet
- Detailed Lesson Plan in Math 6.docx 2-1Document9 pagesDetailed Lesson Plan in Math 6.docx 2-1Sarrah Jane SilvaNo ratings yet
- Manifesto of Pakistan Awami Tehreek (PAT)Document35 pagesManifesto of Pakistan Awami Tehreek (PAT)MinhajBooksNo ratings yet
- Quantitative Analysis For Business Midterm - SolutionDocument6 pagesQuantitative Analysis For Business Midterm - SolutionYiPingHungNo ratings yet
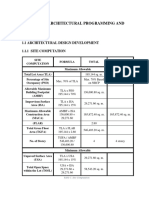
- Architectural Programming and Analysis Space PlanningDocument17 pagesArchitectural Programming and Analysis Space PlanningFranz Joseph Natino NicerioNo ratings yet
- Doctrine of Signatures - NituDocument22 pagesDoctrine of Signatures - NituCat Skull100% (1)
- J101 Vocabularywith Kanji F10Document1 pageJ101 Vocabularywith Kanji F10Dong LiNo ratings yet
- TLE G6 Q1 Module 4Document8 pagesTLE G6 Q1 Module 4Charisma Ursua HonradoNo ratings yet
- MArketing Research Notes Chapter 20Document14 pagesMArketing Research Notes Chapter 20manojpatel51100% (1)
- Ks3 Winter Break HWDocument2 pagesKs3 Winter Break HWPanshul GuptaNo ratings yet
- Popular Mechanics 2018Document102 pagesPopular Mechanics 2018Lester SaquerNo ratings yet
- Chapter 1 QuizDocument5 pagesChapter 1 QuizOWEN TOLINNo ratings yet