You might also like
- Attiny2313 Timers/Counters: Cs-423 Dick SteflikDocument14 pagesAttiny2313 Timers/Counters: Cs-423 Dick SteflikNitin PrajapatiNo ratings yet
- Programmable Logic Controllers: Counters (Cont'd)Document26 pagesProgrammable Logic Controllers: Counters (Cont'd)Dhanush SNo ratings yet
- Frequency MeasurementDocument6 pagesFrequency MeasurementGustavo RiosNo ratings yet
- DATA ACQUISTION-: It Is The Process of Sampling The Signals That Measure Real WorldDocument6 pagesDATA ACQUISTION-: It Is The Process of Sampling The Signals That Measure Real WorldSV MNo ratings yet
- DAQ Course Counters1Document41 pagesDAQ Course Counters1Orlandox LgNo ratings yet
- 8253Document17 pages8253Parv SharmaNo ratings yet
- Simulator Kvadraturnog EnkoderaDocument4 pagesSimulator Kvadraturnog EnkoderaGoran MiljkovicNo ratings yet
- CH 10Document5 pagesCH 10Keerthi Vasan SNo ratings yet
- Board Daq CardDocument24 pagesBoard Daq CardloffycrazeNo ratings yet
- Programming Programmable Logic Controllers (PLCS)Document47 pagesProgramming Programmable Logic Controllers (PLCS)eyob feshaNo ratings yet
- Plcsiemens 2 Week PresentationDocument67 pagesPlcsiemens 2 Week PresentationVijay ChauhanNo ratings yet
- Counter TimersDocument2 pagesCounter Timerspragnesh265798No ratings yet
- An Freq MeasurementDocument14 pagesAn Freq MeasurementfarcasiunNo ratings yet
- 45 - 70655 - EE413 - 2015 - 1 - 2 - 1 - W EE413-lect03 Converters ADC 01Document51 pages45 - 70655 - EE413 - 2015 - 1 - 2 - 1 - W EE413-lect03 Converters ADC 01emad helalNo ratings yet
- Adc0808 and 8253Document35 pagesAdc0808 and 8253Avanish NiranjanNo ratings yet
- Adc0808 and 8253Document35 pagesAdc0808 and 8253Avanish NiranjanNo ratings yet
- Module 4 As On 21.11.2020Document74 pagesModule 4 As On 21.11.2020Chethan SNo ratings yet
- Counters, Registers and MemoriesDocument25 pagesCounters, Registers and MemoriesGaurav UmarNo ratings yet
- HSC 200 (!)Document16 pagesHSC 200 (!)bhargavipanduNo ratings yet
- Programmable Interval Timer: T.Shakeel, Lovely Professional UniversityDocument25 pagesProgrammable Interval Timer: T.Shakeel, Lovely Professional UniversityFaiz RahmanNo ratings yet
- Exploring The Benefits of Frequency Counter Circuit Working and ApplicationsDocument11 pagesExploring The Benefits of Frequency Counter Circuit Working and ApplicationsjackNo ratings yet
- Project ReportDocument44 pagesProject ReportABRAHAM UJAH50% (2)
- Study 4-bit asynchronous counter using IC 7493Document6 pagesStudy 4-bit asynchronous counter using IC 7493Deepak KumbharNo ratings yet
- Unit-4 PPT. Embedded Systems by SuryaDocument34 pagesUnit-4 PPT. Embedded Systems by SuryaAnonymous 3yqNzCxtTz100% (1)
- Mentor Graphics Tutorial: Getting Started with EE610 Design FlowDocument80 pagesMentor Graphics Tutorial: Getting Started with EE610 Design FlowPranav AsthanaNo ratings yet
- APN06 PumpStation PDFDocument6 pagesAPN06 PumpStation PDFMassi MateenNo ratings yet
- Processing StepsDocument1 pageProcessing StepsEngr Nayyer Nayyab MalikNo ratings yet
- Programmable Logic Controllers: Frank D. PetruzellaDocument67 pagesProgrammable Logic Controllers: Frank D. PetruzellasayedmhNo ratings yet
- CE100 - Chapter 5 - Repetition Structures - Fall 202122Document24 pagesCE100 - Chapter 5 - Repetition Structures - Fall 202122Hebatallah Mujahed Mohmoud KanaNo ratings yet
- 4-Modes of 8253 and Control Word-12-09-2022Document7 pages4-Modes of 8253 and Control Word-12-09-2022Arnav BansalNo ratings yet
- Computer Aided Design 2 Computer Aided Design 2 (E3004) (E3004)Document27 pagesComputer Aided Design 2 Computer Aided Design 2 (E3004) (E3004)arelen_asiaNo ratings yet
- Fourier Transform and Signal Analysis with LabVIEWDocument21 pagesFourier Transform and Signal Analysis with LabVIEW1232023No ratings yet
- 7 Counters PDFDocument23 pages7 Counters PDFIhuhwa Marta TauNo ratings yet
- What Is Counter?: Flip-FlopDocument8 pagesWhat Is Counter?: Flip-FlopArunNo ratings yet
- 4-Bit Counter Using Modified Master - Slave Edge Triggered RegisterDocument20 pages4-Bit Counter Using Modified Master - Slave Edge Triggered Registermilanjauhari0% (1)
- Decoding Tachometer Signals Using CompactRIO and LabVIEW FPGADocument3 pagesDecoding Tachometer Signals Using CompactRIO and LabVIEW FPGAOualid LamraouiNo ratings yet
- The 8253Document29 pagesThe 8253Soumya Ranjan PandaNo ratings yet
- 32 Digital ControllersDocument25 pages32 Digital ControllersKARTHIK S SNo ratings yet
- 8253 PitDocument23 pages8253 PitDharani ChinnaNo ratings yet
- Expt No.10Document6 pagesExpt No.10Rithika 318030No ratings yet
- PLC TimersDocument6 pagesPLC TimersMelroy PereiraNo ratings yet
- Lab 4Document21 pagesLab 4Malak Al-AshiNo ratings yet
- Programmable Counter in LabView PDFDocument16 pagesProgrammable Counter in LabView PDFJanine PadillaNo ratings yet
- دورة تدريبية PLCDocument68 pagesدورة تدريبية PLCAhmad JobNo ratings yet
- Programmable Interval Timer Initialization and Operation ModesDocument34 pagesProgrammable Interval Timer Initialization and Operation ModesSayan GhoshNo ratings yet
- De La Rue Bank Note Counter 2650 User ManualDocument20 pagesDe La Rue Bank Note Counter 2650 User Manualpsihoulos100% (1)
- Counters & Shifters: by Dr. Alok Kumar Rastogi Professor of Physics Department of Physics & Electronics IEHE, BhopalDocument45 pagesCounters & Shifters: by Dr. Alok Kumar Rastogi Professor of Physics Department of Physics & Electronics IEHE, BhopalKritiiNo ratings yet
- Simple Ac Systems (Casee-2015)Document16 pagesSimple Ac Systems (Casee-2015)sandeep kumar mishraNo ratings yet
- Timer and Counter Instructions: Dr. Manjula Sutagundar Dept. of E&IE, BEC, BagalkotDocument114 pagesTimer and Counter Instructions: Dr. Manjula Sutagundar Dept. of E&IE, BEC, BagalkotManjula SutagundarNo ratings yet
- Programmable Logic Controller (PLC) : By:-Vinod DeswalDocument82 pagesProgrammable Logic Controller (PLC) : By:-Vinod DeswalHellbuoy RontyNo ratings yet
- Design of CountersDocument52 pagesDesign of CountersSrimay RayNo ratings yet
- USER'S GUIDE FOR ALARM AND TIMEKEEPING FUNCTIONSDocument5 pagesUSER'S GUIDE FOR ALARM AND TIMEKEEPING FUNCTIONScbradatNo ratings yet
- Counters in Digital ElectronicsDocument3 pagesCounters in Digital Electronicsdhirajkumar_1No ratings yet
- Siemens: S7-200 PLC Training CoursesDocument67 pagesSiemens: S7-200 PLC Training CoursesVarshini NNo ratings yet
- Verilog Code For 4 Bit Ring Counter With TestbenchDocument3 pagesVerilog Code For 4 Bit Ring Counter With Testbenchsoumya100% (1)
- CTH Write UpDocument42 pagesCTH Write UpmitparmarNo ratings yet
- Lab 6Document13 pagesLab 6محمد حنظلہNo ratings yet
- L-14 PLC - 3Document70 pagesL-14 PLC - 3S M Jawad FakhirNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Getting Started With The System Identification Assistant 3Document65 pagesGetting Started With The System Identification Assistant 3ahmed4665100% (1)
- 1 - Introduction To Introduction To Control Design ToolkitDocument8 pages1 - Introduction To Introduction To Control Design Toolkitahmed4665No ratings yet
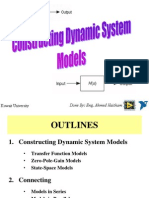
- 2 - Constructing and Connecting Dynamic SystemDocument61 pages2 - Constructing and Connecting Dynamic Systemahmed4665No ratings yet
- 8 - Design Control SimulationDocument88 pages8 - Design Control Simulationahmed4665No ratings yet
- Dynamic DataDocument13 pagesDynamic Dataahmed4665100% (1)
- 3 - Time Response AnalysisDocument24 pages3 - Time Response Analysisahmed4665No ratings yet
- 4 - Frequency Response AnalysisDocument30 pages4 - Frequency Response Analysisahmed4665No ratings yet
- 7 - Designing Classical ControllersDocument53 pages7 - Designing Classical Controllersahmed46650% (1)
- 5 - Stability & Root LocusDocument10 pages5 - Stability & Root Locusahmed4665No ratings yet
- 6 - Analyzing State-Space CharacteristicDocument20 pages6 - Analyzing State-Space Characteristicahmed4665100% (1)
- Data Acquisition (DAQ) 1Document57 pagesData Acquisition (DAQ) 1ahmed4665100% (1)
- AC Signals & SamplingDocument10 pagesAC Signals & Samplingahmed4665No ratings yet
- PID Hardware Real Time SimulationDocument12 pagesPID Hardware Real Time Simulationahmed4665No ratings yet
- How To Use 6211Document23 pagesHow To Use 6211ahmed4665No ratings yet
- Generate Continuous Signals Using 6211Document27 pagesGenerate Continuous Signals Using 6211ahmed4665100% (1)
- LabVIEW Data Types & Conversions Between These TypesDocument23 pagesLabVIEW Data Types & Conversions Between These Typesahmed4665100% (4)
- How To Communicate With Parallel PortDocument24 pagesHow To Communicate With Parallel Portahmed4665100% (6)
- Input Output Files FormatDocument62 pagesInput Output Files Formatahmed4665No ratings yet
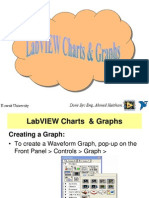
- LabVIEW Charts & GraphsDocument29 pagesLabVIEW Charts & Graphsahmed4665100% (1)
- ParallelismDocument16 pagesParallelismahmed4665No ratings yet
- PidDocument15 pagesPidahmed4665100% (1)
- LabVIEW MathscripDocument37 pagesLabVIEW Mathscripahmed4665No ratings yet
- Reading and Writing Audio Files in LabVIEWDocument15 pagesReading and Writing Audio Files in LabVIEWahmed4665No ratings yet
- LabVIEW ClustersDocument9 pagesLabVIEW Clustersahmed4665No ratings yet
- State MachinesDocument28 pagesState Machinesahmed4665No ratings yet
- Labview File IoDocument18 pagesLabview File Ioahmed4665No ratings yet
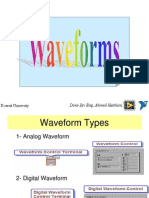
- Wave FormsDocument30 pagesWave Formsahmed4665No ratings yet
- LabVIEW ArraysDocument17 pagesLabVIEW Arraysahmed4665100% (2)
- LabVIEW Programming Environment and Basic OperationsDocument55 pagesLabVIEW Programming Environment and Basic Operationsahmed4665100% (1)
- Srs Template-IeeeDocument8 pagesSrs Template-IeeeHira ShahNo ratings yet
- KX-TES824 or KX-TA824 PC Programming Manual Up To Page 47 Out of 164Document47 pagesKX-TES824 or KX-TA824 PC Programming Manual Up To Page 47 Out of 164Lucas CoaquiraNo ratings yet
- Purchase Order for Computer HardwareDocument1 pagePurchase Order for Computer Hardwaredeepak singhNo ratings yet
- Internet Tools For Advanced Nursing PracticeDocument17 pagesInternet Tools For Advanced Nursing PracticeCzey AnonatNo ratings yet
- Doug Church - Object SystemsDocument36 pagesDoug Church - Object SystemsAnonymous 8URQq2XJNo ratings yet
- Documentation 3d PasswordDocument23 pagesDocumentation 3d PasswordSiligam Pranitha100% (2)
- RFID+ Reader iOS Application NotesDocument12 pagesRFID+ Reader iOS Application NotesneocodesoftwareNo ratings yet
- User Manual lpc11xx lpc11cxxDocument407 pagesUser Manual lpc11xx lpc11cxxChetan PatilNo ratings yet
- Coop's three-part research program and income statement projectionsDocument3 pagesCoop's three-part research program and income statement projectionsKuthe Prashant GajananNo ratings yet
- Manual LCD DaewooDocument48 pagesManual LCD DaewooPedro MoraNo ratings yet
- Benefits of Gantt ChartDocument4 pagesBenefits of Gantt ChartRavi KaniyawalaNo ratings yet
- User Profiles As400Document2 pagesUser Profiles As400KarthickNo ratings yet
- 1.2.4.5 Packet Tracer - Network Representation PDFDocument4 pages1.2.4.5 Packet Tracer - Network Representation PDFoppaiakira100% (1)
- Cryptex TutDocument15 pagesCryptex Tutaditya7398No ratings yet
- V1 - 7750 SR-c12 Installation Guide PDFDocument174 pagesV1 - 7750 SR-c12 Installation Guide PDFuxunNo ratings yet
- Ajax CheatSheetDocument7 pagesAjax CheatSheetdrypzNo ratings yet
- FusionDocument30 pagesFusioncolombia_ssaNo ratings yet
- Apache Flume - Data Transfer in Hadoop - TutorialspointDocument2 pagesApache Flume - Data Transfer in Hadoop - TutorialspointMario SoaresNo ratings yet
- Real Time SimulationDocument7 pagesReal Time SimulationkumarNo ratings yet
- PSSE ReferenceDocument66 pagesPSSE ReferenceeddisonfhNo ratings yet
- Assignment Set-1: MB0048 - Operation ResearchDocument13 pagesAssignment Set-1: MB0048 - Operation ResearchKumar GauravNo ratings yet
- Evaluating Web Sites Checklist FormDocument3 pagesEvaluating Web Sites Checklist Formapi-293835801No ratings yet
- Tapestry TutorialDocument48 pagesTapestry TutorialNarasimha RaoNo ratings yet
- Defcon 17 Sumit Siddharth SQL Injection WormDocument19 pagesDefcon 17 Sumit Siddharth SQL Injection Wormabdel_lakNo ratings yet
- Amity School of Engineering & Technology: B. Tech. (MAE), V Semester Rdbms Sunil VyasDocument13 pagesAmity School of Engineering & Technology: B. Tech. (MAE), V Semester Rdbms Sunil VyasJose AntonyNo ratings yet
- General Purpose Electrochemical System Installation InstructiosDocument50 pagesGeneral Purpose Electrochemical System Installation InstructiosAthanasios MasourasNo ratings yet
- Psalterium Iuxta Hebraeos Hireonymi-Lagarde-1874 PDFDocument203 pagesPsalterium Iuxta Hebraeos Hireonymi-Lagarde-1874 PDFphilologusNo ratings yet
- Systems For Incomplete KnowledgeDocument19 pagesSystems For Incomplete KnowledgeAfreen TajNo ratings yet
- Atul TricksDocument5 pagesAtul Tricksअतुल सिन्हाNo ratings yet