You might also like
- VA II TrainingDocument393 pagesVA II Trainingjawadhussain1100% (1)
- VIBRATION ANALYSIS FUNDAMENTALSDocument76 pagesVIBRATION ANALYSIS FUNDAMENTALSAbderrahim Abaray100% (4)
- Training Program On Vibration AnalysisDocument92 pagesTraining Program On Vibration AnalysisDurga Prasad Padhy100% (2)
- VA II TrainingDocument393 pagesVA II Trainingjawadhussain195% (19)
- Vibration AnalysisDocument75 pagesVibration Analysistylerdurdane100% (12)
- Basic Vibration AnalysisDocument43 pagesBasic Vibration AnalysisAshwani Dogra89% (9)
- Section II - Basic Vibration TheoryDocument85 pagesSection II - Basic Vibration Theoryagiba100% (7)
- Vibration AnalysisDocument125 pagesVibration AnalysisAshutosh Patra100% (7)
- Vib AnalysisDocument125 pagesVib AnalysisFaruque Khan Yumkhaibam100% (2)
- TransducersDocument121 pagesTransducersfazzlieNo ratings yet
- Vibration Basics 2Document82 pagesVibration Basics 2AbdulNo ratings yet
- Vibration AnalysisDocument22 pagesVibration Analysisvenkat chakNo ratings yet
- BalancingDocument138 pagesBalancingJeinnerCastroNo ratings yet
- Autocorrelation: 131 CAT IV Part 1 - Signal Processing SlidebookDocument8 pagesAutocorrelation: 131 CAT IV Part 1 - Signal Processing SlidebookLe Thanh Hai100% (2)
- Basics of VibrationDocument22 pagesBasics of VibrationPrashant Puri0% (1)
- VIBS Modal Overview 021703 MACLDocument55 pagesVIBS Modal Overview 021703 MACLBakkiya RajNo ratings yet
- Vibration MonitoringDocument67 pagesVibration MonitoringApurv Khandelwal100% (4)
- How To Bump Test With MicrologDocument2 pagesHow To Bump Test With MicrologYuda SatriaNo ratings yet
- Analisis de Vibraciones Mecanicas SKFDocument31 pagesAnalisis de Vibraciones Mecanicas SKFJhonathan GarciaNo ratings yet
- EM 67 - Recommended Practices For A Bump TestDocument4 pagesEM 67 - Recommended Practices For A Bump TestChad Hunt100% (2)
- Predictive Maintenance Solutions for RM ChemicalsDocument25 pagesPredictive Maintenance Solutions for RM ChemicalsAnant Jain100% (1)
- Vibration Analysis Level 1Document3 pagesVibration Analysis Level 1mohanmani0250% (2)
- Orbits and SCL PresentationDocument18 pagesOrbits and SCL PresentationChad Hunt100% (3)
- Introduction To PeakvueDocument55 pagesIntroduction To PeakvuesebastianNo ratings yet
- Timebase Plots ExplainedDocument18 pagesTimebase Plots ExplainedManuel L LombarderoNo ratings yet
- Introduction To Basic Vibration AnalysisDocument162 pagesIntroduction To Basic Vibration AnalysisΡαφαηλ Καμ.100% (2)
- AMPLITUDE MODULATION Versus BEATSDocument5 pagesAMPLITUDE MODULATION Versus BEATSHaitham YoussefNo ratings yet
- Detection of Ski Slopes in Vibration SpectrumsDocument7 pagesDetection of Ski Slopes in Vibration SpectrumsjeyaselvanmNo ratings yet
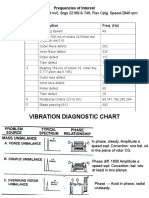
- Vibration Diagnostic Chart1Document16 pagesVibration Diagnostic Chart1Anand KumarNo ratings yet
- Detect Machinery Faults by Using Peak VueDocument13 pagesDetect Machinery Faults by Using Peak VueHarold Alconz100% (2)
- CMVA Vibration Math FormulasDocument4 pagesCMVA Vibration Math Formulasyianisr5990No ratings yet
- Vibration Analysis Level I Course GuideDocument230 pagesVibration Analysis Level I Course Guidejawadhussain189% (9)
- Vibration Analysis Manual Rev0Document143 pagesVibration Analysis Manual Rev0iradanke100% (5)
- Time Waveform AnalysisDocument26 pagesTime Waveform AnalysisSurika Martalina100% (1)
- Vibration Diagnostic ChartDocument49 pagesVibration Diagnostic Chartujepadounk100% (1)
- ACOEM (OneProd) Vs CSI 2140 ComparisonDocument2 pagesACOEM (OneProd) Vs CSI 2140 ComparisonSyed Huzaifa Ahmed (Larf Nalavale)100% (1)
- Examples of Balancing Method - Four-Run and Least-Squares Influence CoefficientsDocument44 pagesExamples of Balancing Method - Four-Run and Least-Squares Influence CoefficientsNguyen Anh TuNo ratings yet
- 10 Components of A Successful Vibration Program 2Document5 pages10 Components of A Successful Vibration Program 2allmcbeallNo ratings yet
- Chapter 10Document63 pagesChapter 10Hosam Abd Elkhalek100% (1)
- Introduction To PeakvueDocument55 pagesIntroduction To PeakvueAhmed Nazeem100% (4)
- ISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-Shurafa PDFDocument1 pageISO Vibration Analysis Certification Exam Cat I Part 3 Signal Processing Ali M Al-Shurafa PDFMohammed Kamel TonyNo ratings yet
- Using Time Waveform Analysis To Distinguish Looseness From MisalignmentDocument5 pagesUsing Time Waveform Analysis To Distinguish Looseness From MisalignmentManel Montesinos100% (1)
- Introduction to Vibration Analysis Programs (40Document52 pagesIntroduction to Vibration Analysis Programs (40Sam100% (3)
- Advanced Vibration Analysis TechniquesDocument324 pagesAdvanced Vibration Analysis Techniquesharikrishnanpd3327No ratings yet
- 2 Vibn Analysis BasicsDocument117 pages2 Vibn Analysis BasicsTanoj PatroNo ratings yet
- Basic Vibration Analysis - IDocument43 pagesBasic Vibration Analysis - Idhaval_trivedi_3No ratings yet
- Vibration Monitoring and AnalysisDocument56 pagesVibration Monitoring and AnalysisMithlesh SharmaNo ratings yet
- Basic Vibration Seminar: ALPS Maintaineering Services, IncDocument101 pagesBasic Vibration Seminar: ALPS Maintaineering Services, Incbadgeo77No ratings yet
- Fault Identification and Monitoring in Rolling Element BearingDocument234 pagesFault Identification and Monitoring in Rolling Element BearingRushikesh DandagwhalNo ratings yet
- Machine Vibration Basics GuideDocument9 pagesMachine Vibration Basics GuidevikasinmumbaiNo ratings yet
- BASIC VIBRATION GUIDEDocument76 pagesBASIC VIBRATION GUIDEJack Adam100% (1)
- Condition Monitoring For ElectricalDocument28 pagesCondition Monitoring For ElectricalArindam SamantaNo ratings yet
- MEASURING VIBRATION & DISPLACEMENTDocument6 pagesMEASURING VIBRATION & DISPLACEMENTSatNo ratings yet
- Vib Training-Hpc CacharDocument108 pagesVib Training-Hpc CacharSasi NimmakayalaNo ratings yet
- Basics of Vibration and Vibration MeasurementDocument38 pagesBasics of Vibration and Vibration MeasurementAnand Kumar100% (4)
- Familiarization With and Performance Check Of, Vibration Testing & Measuring EquipmentDocument33 pagesFamiliarization With and Performance Check Of, Vibration Testing & Measuring EquipmentOmar Saleem100% (1)
- Turbovisory InstrumentsDocument21 pagesTurbovisory InstrumentsSupratim Pal100% (5)
- Monarch 1000 ManualDocument10 pagesMonarch 1000 ManualABRIL19No ratings yet
- Turbine Supervisory Instruments Monitor Critical ParametersDocument25 pagesTurbine Supervisory Instruments Monitor Critical ParametersMorassa Chona100% (1)
- Iso 10816Document4 pagesIso 10816spbhaskaran28No ratings yet
- 19-20-330-340-PLC DWG-250MW-BIKANER-RAJ-As BuiltDocument41 pages19-20-330-340-PLC DWG-250MW-BIKANER-RAJ-As Builtpradeep.selvarajanNo ratings yet
- Cable Size Calculations Based On Motor HPDocument4 pagesCable Size Calculations Based On Motor HPpradeep.selvarajanNo ratings yet
- Mukesh Kumar's 8.5+ years experience in infrastructure advisoryDocument7 pagesMukesh Kumar's 8.5+ years experience in infrastructure advisorypradeep.selvarajanNo ratings yet
- SOP For Turbine ChecklistDocument11 pagesSOP For Turbine Checklistpradeep.selvarajanNo ratings yet
- Udupi Power Corporation Ltd. Ims Department Manual Doc. No. 0 Operation Rev. No. 0 Upcl Sop-Cold Startup Date 05.05.10 Page No. 1Document25 pagesUdupi Power Corporation Ltd. Ims Department Manual Doc. No. 0 Operation Rev. No. 0 Upcl Sop-Cold Startup Date 05.05.10 Page No. 1pradeep.selvarajanNo ratings yet
- Energies 08 08716Document21 pagesEnergies 08 08716pradeep.selvarajanNo ratings yet
- PES S 1 20 KZ Talking Point EJ V5 1Document6 pagesPES S 1 20 KZ Talking Point EJ V5 1pradeep.selvarajanNo ratings yet
- SOP For Turbine ChecklistDocument1 pageSOP For Turbine Checklistpradeep.selvarajanNo ratings yet
- ATT01 - 7347-400 Operation Manual Main Cooling Water RackDocument17 pagesATT01 - 7347-400 Operation Manual Main Cooling Water Rackpradeep.selvarajanNo ratings yet
- 600mw Operation ManualDocument243 pages600mw Operation Manualer4varun83% (6)
- SAIC-J - 6022 - Rev 0Document13 pagesSAIC-J - 6022 - Rev 0pradeep.selvarajanNo ratings yet
- SOP For Boiler Light Up ChecklistDocument9 pagesSOP For Boiler Light Up Checklistpradeep.selvarajan100% (1)
- Issued For Asbuilt: 1 X 660 MW Cirebon Coal Fired Power PlantDocument13 pagesIssued For Asbuilt: 1 X 660 MW Cirebon Coal Fired Power Plantpradeep.selvarajanNo ratings yet
- Issued For Asbuilt: 1 X 660 MW Cirebon Coal Fired Power PlantDocument13 pagesIssued For Asbuilt: 1 X 660 MW Cirebon Coal Fired Power Plantpradeep.selvarajanNo ratings yet
- Detergent Flushing of Pre Boiler SystemDocument23 pagesDetergent Flushing of Pre Boiler Systempradeep.selvarajanNo ratings yet
- Area Classification IEC NECDocument18 pagesArea Classification IEC NECin107247100% (1)
- Issued For Asbuilt: 1 X 660 MW Cirebon Coal Fired Power PlantDocument13 pagesIssued For Asbuilt: 1 X 660 MW Cirebon Coal Fired Power Plantpradeep.selvarajanNo ratings yet
- Sample PID Symbols and LegendsDocument32 pagesSample PID Symbols and Legendstwinbrothers97% (29)
- 03 ID FD Logic SystemDocument40 pages03 ID FD Logic Systempradeep.selvarajan100% (1)
- Best Practice For Thermal Power PlantsDocument186 pagesBest Practice For Thermal Power Plantsnao100% (27)
- Block Diagram For Master & Slave ClockDocument1 pageBlock Diagram For Master & Slave Clockpradeep.selvarajanNo ratings yet
- Boilers HeatersDocument24 pagesBoilers HeatersPato FuentesNo ratings yet
- Handbook of ValvesDocument98 pagesHandbook of Valvespradeep.selvarajanNo ratings yet
- Area Classification IEC NECDocument18 pagesArea Classification IEC NECin107247100% (1)
- Hot Extraction Vs InsituDocument5 pagesHot Extraction Vs Insitupradeep.selvarajanNo ratings yet
- Control Valve CavitationDocument7 pagesControl Valve Cavitationpradeep.selvarajanNo ratings yet
- CW - Acw Scheme REV1 ModelDocument1 pageCW - Acw Scheme REV1 Modelpradeep.selvarajanNo ratings yet
- Cavitation of ValvesDocument64 pagesCavitation of ValvesMiguel Angel Razo100% (2)
- Techinical Information Handbook Wire and Cable PDFDocument328 pagesTechinical Information Handbook Wire and Cable PDFctsak83% (6)
- Cavitation of ValvesDocument64 pagesCavitation of ValvesMiguel Angel Razo100% (2)
- Maza Trol M 2 Operator ManualDocument5 pagesMaza Trol M 2 Operator Manualcamb2270100% (1)
- ZB Catalogue (090811)Document70 pagesZB Catalogue (090811)Brijesh MistryNo ratings yet
- TCF VentiladoresDocument72 pagesTCF VentiladoresJaime David Martinez GarciaNo ratings yet
- HMA-36509 - Reclaim Feeder Manual RevcDocument111 pagesHMA-36509 - Reclaim Feeder Manual RevcAbdul HamidNo ratings yet
- Driveshaft and Axle Specifications for 2009 Hyundai Azera 3.3LDocument32 pagesDriveshaft and Axle Specifications for 2009 Hyundai Azera 3.3LCesar GiraccaNo ratings yet
- ServiceDocument36 pagesServiceigusukNo ratings yet
- MLA I Information EnglishDocument5 pagesMLA I Information EnglishCondition Basedntenance MaintenanceNo ratings yet
- Lubricants For The Paper IndustryDocument11 pagesLubricants For The Paper IndustryMiguel VenzNo ratings yet
- TM-81 Condenser Cleaner 5125Document6 pagesTM-81 Condenser Cleaner 5125gshdavidNo ratings yet
- Static analysis of angular contact ball bearing using FEMDocument16 pagesStatic analysis of angular contact ball bearing using FEMparthp5423No ratings yet
- NACHI Precision Roller - Catalog PDFDocument78 pagesNACHI Precision Roller - Catalog PDFCristopher Entena0% (1)
- SOP Bearing ReplacementDocument10 pagesSOP Bearing ReplacementzaidmuzammilNo ratings yet
- Rothenberger R600 ManualDocument10 pagesRothenberger R600 Manualdorin stoicuNo ratings yet
- NCCS-2019-1010: Cold Flow Testing and CFD Analysis of Screw Pump For Lox Pump of Semi-Cryogenic EngineDocument8 pagesNCCS-2019-1010: Cold Flow Testing and CFD Analysis of Screw Pump For Lox Pump of Semi-Cryogenic EngineSiddharth BehalNo ratings yet
- Top Drive - Lessons LearnedDocument8 pagesTop Drive - Lessons LearnedRuslan ZakirovNo ratings yet
- Snfa RodamientosDocument130 pagesSnfa RodamientosCristobal Pérez MonteroNo ratings yet
- DB-STD Part Drop BoxDocument4 pagesDB-STD Part Drop BoxRezhaNo ratings yet
- PS1800 Centrifugal Pumping Systems: General Data and Sizing TablesDocument12 pagesPS1800 Centrifugal Pumping Systems: General Data and Sizing TablesSINES FranceNo ratings yet
- 3D Service ManualDocument24 pages3D Service ManualCastañeda Fonseca WilliamNo ratings yet
- SutorbiltLegendBrochure 16Document12 pagesSutorbiltLegendBrochure 16Wil TimpoNo ratings yet
- Bearings For Bridges: Dr. Shahzad Rahman NWFP University of Engg & Technology, PeshawarDocument53 pagesBearings For Bridges: Dr. Shahzad Rahman NWFP University of Engg & Technology, PeshawarAbhimanyu SinghNo ratings yet
- Fire Pumps: Excel SeriesDocument16 pagesFire Pumps: Excel SeriesDaney RockerzNo ratings yet
- Extruder GB Rating PDFDocument19 pagesExtruder GB Rating PDFDwi HaadiNo ratings yet
- Module 5: Bearing Materials and TypesDocument126 pagesModule 5: Bearing Materials and TypesArjun LalitNo ratings yet
- 80 3256Document52 pages80 3256Oscar CruzNo ratings yet
- IndustrialmotorscatalogueDocument86 pagesIndustrialmotorscataloguenavneetNo ratings yet
- 3 - Conveyor - Components - Mexico IPTSDocument24 pages3 - Conveyor - Components - Mexico IPTSrrobles011No ratings yet
- Fire Pump Drive Engines CFP59 SeriesDocument549 pagesFire Pump Drive Engines CFP59 SeriesSupert8chNo ratings yet
- Tech Seminar On Wind TurbinesDocument20 pagesTech Seminar On Wind TurbinesBn SharathNo ratings yet