You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- 3 DG Auto Load Sharing SchemeDocument9 pages3 DG Auto Load Sharing Schemeuump100% (1)
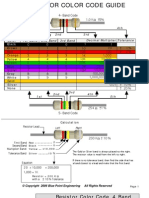
- Resistor ChartsDocument5 pagesResistor ChartsmarlonfatnetzeronetNo ratings yet
- PICmicro MCU C - An Introduction To Programming The Microchip PIC in CCS CDocument135 pagesPICmicro MCU C - An Introduction To Programming The Microchip PIC in CCS Cvaibhav6820100% (34)
- Promecam Parts ListDocument43 pagesPromecam Parts Listuump80% (5)
- Task Based Risk Assesment FormDocument2 pagesTask Based Risk Assesment FormKolluri SrinivasNo ratings yet
- Evoked PotentialsDocument49 pagesEvoked PotentialsparuNo ratings yet
- Life Insurance Exam Questions and Answers PDFDocument13 pagesLife Insurance Exam Questions and Answers PDFDairo GaniyatNo ratings yet
- Oracle Weblogic Server 12c Administration II - Activity Guide PDFDocument188 pagesOracle Weblogic Server 12c Administration II - Activity Guide PDFNestor Torres Pacheco100% (1)
- Dau Terminal AnalysisDocument49 pagesDau Terminal AnalysisMila Zulueta100% (2)
- Wire Gauge Table with Diameter and AreaDocument0 pagesWire Gauge Table with Diameter and AreauumpNo ratings yet
- Citect With SVDocument18 pagesCitect With SVuumpNo ratings yet
- Meter Board PanelDocument1 pageMeter Board PaneluumpNo ratings yet
- Rules AMIE ExaminationDocument6 pagesRules AMIE ExaminationAjesh kumarNo ratings yet
- Visual Basics NoteDocument115 pagesVisual Basics NoteuumpNo ratings yet
- Synopsis FormatDocument22 pagesSynopsis FormatRyan ZamoraNo ratings yet
- Cee 3804 Excel Macros VBA 07Document68 pagesCee 3804 Excel Macros VBA 07suman33No ratings yet
- Rules AMIE ExaminationDocument6 pagesRules AMIE ExaminationAjesh kumarNo ratings yet
- Meter Board PanelDocument1 pageMeter Board PaneluumpNo ratings yet
- Long-Haul CommunicationDocument13 pagesLong-Haul CommunicationuumpNo ratings yet
- Synopsis FormatDocument22 pagesSynopsis FormatRyan ZamoraNo ratings yet
- Phone FacilitiesDocument3 pagesPhone FacilitiesuumpNo ratings yet
- GT-N7000 UM EU Icecream Eng Rev.1.1 120517 ScreenDocument200 pagesGT-N7000 UM EU Icecream Eng Rev.1.1 120517 ScreenankitNo ratings yet
- Information and Its ConveyanceDocument14 pagesInformation and Its ConveyanceuumpNo ratings yet
- Information and Its ConveyanceDocument14 pagesInformation and Its ConveyanceuumpNo ratings yet
- Quality Management PolicyDocument1 pageQuality Management PolicyuumpNo ratings yet
- 01units and DimensionsDocument14 pages01units and Dimensionseamcetmaterials100% (12)
- GT-N7000 UM EU Icecream Eng Rev.1.1 120517 ScreenDocument200 pagesGT-N7000 UM EU Icecream Eng Rev.1.1 120517 ScreenankitNo ratings yet
- Fan 7711Document21 pagesFan 7711uumpNo ratings yet
- Everything You Need to Know About Electrical EarthingDocument99 pagesEverything You Need to Know About Electrical EarthinguumpNo ratings yet
- DVP SA DatasheetDocument2 pagesDVP SA DatasheetsamitosuNo ratings yet
- Patient Safety IngDocument6 pagesPatient Safety IngUlfani DewiNo ratings yet
- Hangup Cause Code Table: AboutDocument5 pagesHangup Cause Code Table: Aboutwhatver johnsonNo ratings yet
- Lilypad Hotels & Resorts: Paul DidriksenDocument15 pagesLilypad Hotels & Resorts: Paul DidriksenN.a. M. TandayagNo ratings yet
- Bode PlotDocument6 pagesBode PlotChandan S KNo ratings yet
- Essential earthquake preparedness stepsDocument6 pagesEssential earthquake preparedness stepsRalphNacisNo ratings yet
- Holmes 1993Document8 pagesHolmes 1993Rumaisa KrubaNo ratings yet
- TT100 Viscometer: For Inline Systems ApplicationsDocument2 pagesTT100 Viscometer: For Inline Systems ApplicationsPablo Antu Manque RodriguezNo ratings yet
- Loctite 270™: Technical Data SheetDocument4 pagesLoctite 270™: Technical Data SheetM Jobayer AzadNo ratings yet
- People VS Yancon-DumacasDocument2 pagesPeople VS Yancon-Dumacasvincent nifasNo ratings yet
- Econometrics ProjectDocument17 pagesEconometrics ProjectAkash ChoudharyNo ratings yet
- Routine E-Mail Messages and Memos-Ch 8Document43 pagesRoutine E-Mail Messages and Memos-Ch 8Faryal ArifNo ratings yet
- What Is Propaganda DeviceDocument3 pagesWhat Is Propaganda DeviceGino R. Monteloyola100% (1)
- Sys Admin Guide Xerox WorkCentre 7775Document185 pagesSys Admin Guide Xerox WorkCentre 7775dankorzon1No ratings yet
- How To Use Oracle Account Generator For Project Related TransactionsDocument40 pagesHow To Use Oracle Account Generator For Project Related Transactionsapnambiar88No ratings yet
- SOLUTIONS : Midterm Exam For Simulation (CAP 4800)Document14 pagesSOLUTIONS : Midterm Exam For Simulation (CAP 4800)Amit DostNo ratings yet
- How To Block Facebook in Mikrotik Using L7 Protocols (Layer 7) - Lazy Geek - )Document11 pagesHow To Block Facebook in Mikrotik Using L7 Protocols (Layer 7) - Lazy Geek - )oscar_198810No ratings yet
- Parents Day Script - PDF - Schools - LeisureDocument17 pagesParents Day Script - PDF - Schools - LeisureNAIDU SHAKEENANo ratings yet
- Real-Time Java and ATCDocument44 pagesReal-Time Java and ATCdnk_victon6248No ratings yet
- Nippon Metal Primer Red Oxide TDSDocument2 pagesNippon Metal Primer Red Oxide TDSPraveen KumarNo ratings yet
- QPMC Rate CardsDocument9 pagesQPMC Rate CardsTarek TarekNo ratings yet
- Index: Title Page Acknowledgement Chapter 1: ProfilesDocument43 pagesIndex: Title Page Acknowledgement Chapter 1: ProfilesRaushan singhNo ratings yet
- Project CST 383Document1,083 pagesProject CST 383api-668525404No ratings yet
- OFW Dependent Scholarship AssessmentDocument3 pagesOFW Dependent Scholarship AssessmentJosebeth CairoNo ratings yet
- Interpretation 1Document17 pagesInterpretation 1ysunnyNo ratings yet
- Apple Led Cinema Display 24inchDocument84 pagesApple Led Cinema Display 24inchSantos MichelNo ratings yet