You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Gate2012 2118669 PDFDocument5 pagesGate2012 2118669 PDFgetmak99No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Combating Cyber Crime:: The Legal (& Practical) ChallengesDocument0 pagesCombating Cyber Crime:: The Legal (& Practical) Challengesgetmak99No ratings yet
- Principal Meeting PDFDocument1 pagePrincipal Meeting PDFgetmak99No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- PG Thesis Document Guidelines FinalDocument10 pagesPG Thesis Document Guidelines Finalgetmak99No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Subnetting Made SimpleDocument21 pagesSubnetting Made SimpleSanjay BalwaniNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
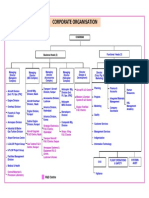
- Organisation Chart PDFDocument1 pageOrganisation Chart PDFgetmak99No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Feedforward Neural Networks: An IntroductionDocument16 pagesFeedforward Neural Networks: An Introductionranjan2234No ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Parallel HoDocument21 pagesParallel HoPavan Kumar SNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Chapter 9 SolDocument3 pagesChapter 9 SolMoose CollectionsNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- 66 Pub PDFDocument50 pages66 Pub PDFgetmak99No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Fig 2 PDFDocument22 pagesFig 2 PDFgetmak99No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Neural Networks 2Document38 pagesNeural Networks 2Mohamed H. JiffryNo ratings yet
- Hasi SciChina Wavelet SOM PDFDocument8 pagesHasi SciChina Wavelet SOM PDFgetmak99No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- 200712L038 PDFDocument8 pages200712L038 PDFgetmak99No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Ann Basics PDFDocument13 pagesAnn Basics PDFgetmak99No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- NN Basics Tutorial 2004Document46 pagesNN Basics Tutorial 2004dunertoNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- pxc3872686 PDFDocument8 pagespxc3872686 PDFgetmak99No ratings yet
- 5-Ann Gkjha 2007 PDFDocument0 pages5-Ann Gkjha 2007 PDFgetmak99No ratings yet
- 5vol3no4 PDFDocument6 pages5vol3no4 PDFgetmak99No ratings yet
- MLP Handout PDFDocument24 pagesMLP Handout PDFgetmak99No ratings yet
- How To Solve Remote Desktop ProblemsDocument4 pagesHow To Solve Remote Desktop Problemsgetmak99No ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 2005 Larsen Lecture Notes - Fundamentals of Fuzzy Sets and Fuzzy Logic PDFDocument8 pages2005 Larsen Lecture Notes - Fundamentals of Fuzzy Sets and Fuzzy Logic PDFgetmak99No ratings yet
- Flame Alert: Some Readers Are Throwing Fits Because I Dared To Compare DOS To Bash. I Can Compare CMD - Exe To Bash If I Want To. Nanny Nanny Nah NahDocument10 pagesFlame Alert: Some Readers Are Throwing Fits Because I Dared To Compare DOS To Bash. I Can Compare CMD - Exe To Bash If I Want To. Nanny Nanny Nah Nahgetmak99No ratings yet
- Fulltext PDFDocument26 pagesFulltext PDFgetmak99No ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- CMD CommandDocument6 pagesCMD Commandgetmak99No ratings yet
- StoichiotryDocument57 pagesStoichiotryJezriel Theana SisonNo ratings yet
- Armare La Strapungere Pentru Palnsee Dale Jda B en D Teh 56465Document24 pagesArmare La Strapungere Pentru Palnsee Dale Jda B en D Teh 56465mihaitimofteNo ratings yet
- A Primer On Spray Drying Chemical Engineering Nov09Document7 pagesA Primer On Spray Drying Chemical Engineering Nov09Hikmah Triana HadiNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- HRTEMDocument5 pagesHRTEMRajathi YadavNo ratings yet
- V33500 TVDocument2 pagesV33500 TVgoriath-fxNo ratings yet
- FM GREASE AX EP SERIES - Data Sheet PDFDocument2 pagesFM GREASE AX EP SERIES - Data Sheet PDFricardo gomezNo ratings yet
- IM KR180A E 4thDocument80 pagesIM KR180A E 4thbatizap batizapNo ratings yet
- Notificatio N (Rese Rvation) Gove Rnment: A Cu) UTDocument1 pageNotificatio N (Rese Rvation) Gove Rnment: A Cu) UT122-Ayush Kumar ParganihaNo ratings yet
- Mixed Grabar b2Document1 pageMixed Grabar b2lynNo ratings yet
- Nutanix TN 2072 ESXi AHV Migration Version 2.2Document23 pagesNutanix TN 2072 ESXi AHV Migration Version 2.2Alejandro DariczNo ratings yet
- Reinforced Concrete Design BS 8110Document15 pagesReinforced Concrete Design BS 8110Kutty Mansoor75% (4)
- Chemical - Reactions - Balancing - Equations by JSS Feb 2019Document34 pagesChemical - Reactions - Balancing - Equations by JSS Feb 2019Maria Alyssa MagallonNo ratings yet
- DSTV Channel PublicDocument3 pagesDSTV Channel PublicCalvin MulaudziNo ratings yet
- AR15.40-P-5032TA Remove/install Alternator 4.2.09 Engine 648.961 in MODEL 211.023 /223 /026 /226Document2 pagesAR15.40-P-5032TA Remove/install Alternator 4.2.09 Engine 648.961 in MODEL 211.023 /223 /026 /226Stefan AdrianNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Dielectric HeatingDocument2 pagesDielectric HeatingPallavi JainNo ratings yet
- SQAP For Pumps 2017Document79 pagesSQAP For Pumps 2017MukeshNo ratings yet
- Orca Share Media1541759628568 PDFDocument12 pagesOrca Share Media1541759628568 PDFJuneNeilBalacuitNo ratings yet
- Pacom S72724+PDR32-RMT-HYB+ManualDocument130 pagesPacom S72724+PDR32-RMT-HYB+ManualDavidChisholmNo ratings yet
- Trouble Shooting Dewatering PumpDocument136 pagesTrouble Shooting Dewatering PumpMuhammad NoorNo ratings yet
- Base Plate and Anchor Rod DesignDocument2 pagesBase Plate and Anchor Rod DesignKannan MurugesanNo ratings yet
- RE14092021Document2 pagesRE14092021francis puthuserilNo ratings yet
- Us 8466302Document11 pagesUs 8466302Widya Isti AriantiNo ratings yet
- CH 16Document20 pagesCH 16Engr. Talha Riaz PersotaNo ratings yet
- Iso 5294 1989Document9 pagesIso 5294 1989a.mursadinNo ratings yet
- Need and Future of Electronics and Automation inDocument21 pagesNeed and Future of Electronics and Automation inAjay Kumar VermaNo ratings yet
- Rftmdc6a PDFDocument17 pagesRftmdc6a PDFShakeebNo ratings yet
- Fastner and Tooling Components. Fertrading Group Venezuela.Document4 pagesFastner and Tooling Components. Fertrading Group Venezuela.Renso PiovesanNo ratings yet
- Hoshin Policy Deployment TemplatesDocument8 pagesHoshin Policy Deployment Templatesjcruz909No ratings yet
- HPSIM Command Line InterfaceDocument107 pagesHPSIM Command Line Interfacegverma80No ratings yet
- Deep Bar and Double Cage 010223Document20 pagesDeep Bar and Double Cage 010223Debankan ChatterjeeNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet