You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Design of Raft FoundationDocument6 pagesDesign of Raft FoundationAshish GNo ratings yet
- CALCULATION OF LOADDocument47 pagesCALCULATION OF LOADAshish GNo ratings yet
- WC 1Document6 pagesWC 1Ashish GNo ratings yet
- WC 1Document6 pagesWC 1Ashish GNo ratings yet
- Calculation of Load Carrying Capacity of Pile (Al)Document26 pagesCalculation of Load Carrying Capacity of Pile (Al)Ashish GNo ratings yet
- Bridge Design Eurocodes Worked ExamplesDocument438 pagesBridge Design Eurocodes Worked Examplespradeepjoshi007100% (4)
- Upload 4Document31 pagesUpload 4Ashish GNo ratings yet
- Intake 1Document9 pagesIntake 1Ashish GNo ratings yet
- Staircase 1Document1 pageStaircase 1Ashish GNo ratings yet
- Irs Seismic Code 2017 PDFDocument39 pagesIrs Seismic Code 2017 PDFSM ConsultantsNo ratings yet
- U-shaped retaining wall design parametersDocument4 pagesU-shaped retaining wall design parametersAshish G100% (1)
- EE (Bridge) / SE (P&D) / E.I.C.: 1 X 20.00 1X19.35 PileDocument4 pagesEE (Bridge) / SE (P&D) / E.I.C.: 1 X 20.00 1X19.35 PileAshish GNo ratings yet
- Return WallDocument4 pagesReturn WallAshish GNo ratings yet
- PedestalDocument1 pagePedestalAshish GNo ratings yet
- Irs Seismic Code 2017 PDFDocument39 pagesIrs Seismic Code 2017 PDFSM ConsultantsNo ratings yet
- 1) in This Load Management Significance of Load Case - 1 & 2 (SW-SUM & STG-SUM) Is Not Understood. Could You Please Explain What Does This Signifies?Document10 pages1) in This Load Management Significance of Load Case - 1 & 2 (SW-SUM & STG-SUM) Is Not Understood. Could You Please Explain What Does This Signifies?Ashish GNo ratings yet
- B1-Floorbeam (250 X 500) Beam DesignDocument2 pagesB1-Floorbeam (250 X 500) Beam DesignAshish GNo ratings yet
- Structure Ref: Left Hand EndDocument3 pagesStructure Ref: Left Hand EndAshish GNo ratings yet
- Model School - r1 PDFDocument5 pagesModel School - r1 PDFAshish GNo ratings yet
- Brahmanipali Design Report PDFDocument21 pagesBrahmanipali Design Report PDFAshish GNo ratings yet
- Pile Foundation BuildingDocument6 pagesPile Foundation BuildingAshish GNo ratings yet
- Design of Corbel: (Check)Document14 pagesDesign of Corbel: (Check)Ashish GNo ratings yet
- FinalDocument2 pagesFinalAshish GNo ratings yet
- Handbook For Returning Officers (Council Elections) PDFDocument473 pagesHandbook For Returning Officers (Council Elections) PDFAshish GNo ratings yet
- DriftDocument4 pagesDriftsunilr_60No ratings yet
- Stresses Slide 1Document36 pagesStresses Slide 1Muhammad Waleed KhanNo ratings yet
- Error 'Port 80 (Or 443) Is Not Responding' When Running Activation Tool For Web-Activated LicensesDocument1 pageError 'Port 80 (Or 443) Is Not Responding' When Running Activation Tool For Web-Activated LicensesAshish GNo ratings yet
- Irc 6-2016Document107 pagesIrc 6-2016Manvendra Nigam100% (26)
- Bridge Bearings 2014Document167 pagesBridge Bearings 2014ErDKushwaha100% (1)
- M30 All Around (Typ.) : Construction of Mounded Storage Vessel at Tuticorin and Thanjavur LPG PlantsDocument1 pageM30 All Around (Typ.) : Construction of Mounded Storage Vessel at Tuticorin and Thanjavur LPG PlantsAshish GNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
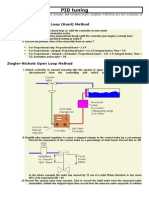
- PID TuningDocument4 pagesPID TuningJitendra Kumar100% (1)
- Manual BasecamDocument118 pagesManual BasecamGermán BergerNo ratings yet
- Lecture VI - PID Controller in Pneumatic System (Use Case)Document21 pagesLecture VI - PID Controller in Pneumatic System (Use Case)R.W. Saputra100% (1)
- ..... Biodiesel Production SystemDocument22 pages..... Biodiesel Production SystemmohamedNo ratings yet
- 1827u enDocument36 pages1827u enOrlando VeladoNo ratings yet
- Automation in Industrial Applications: Izabella GEAPANA, Toader SERETAN October 09, 2020Document83 pagesAutomation in Industrial Applications: Izabella GEAPANA, Toader SERETAN October 09, 2020Ștefan KișNo ratings yet
- A New Reaching Law For Anti-Disturbance Sliding-Mode Control of PMSM Speed Regula-Tion SystemDocument10 pagesA New Reaching Law For Anti-Disturbance Sliding-Mode Control of PMSM Speed Regula-Tion SystemAmar SajiNo ratings yet
- User's Guide For LX Brushless Servo DrivesDocument68 pagesUser's Guide For LX Brushless Servo DrivesRoberto Escudero EL TiburonNo ratings yet
- 12-Tuning Based On Integral Error CriteriaDocument15 pages12-Tuning Based On Integral Error CriteriaAmirul Assyraf NoorNo ratings yet
- Optimizing Operation and Integration of Flare Systems and Gas To Energy PlantsDocument11 pagesOptimizing Operation and Integration of Flare Systems and Gas To Energy PlantsAnonymous uDG5nTNo ratings yet
- Air Handling Unit ComponentsDocument41 pagesAir Handling Unit ComponentsissamouneNo ratings yet
- fulu-electric FL-J2 онже hs100, hs200, IDS-Drive M402T2BDocument26 pagesfulu-electric FL-J2 онже hs100, hs200, IDS-Drive M402T2Bxshadow dps100% (2)
- Assignment Report #4: Obstacle Avoidance AlgorithmDocument12 pagesAssignment Report #4: Obstacle Avoidance AlgorithmAnjali DhobaleNo ratings yet
- Process Control, Network Systems, and SCADADocument13 pagesProcess Control, Network Systems, and SCADASTNo ratings yet
- PID Tuning Guide: A Best-Practices ApproachDocument28 pagesPID Tuning Guide: A Best-Practices ApproachKieron Ivan Mendoza GutierrezNo ratings yet
- An Overview of Autonomous Crop Row Navigation Strategies For Unmanned Ground VehiclesDocument8 pagesAn Overview of Autonomous Crop Row Navigation Strategies For Unmanned Ground VehiclesSudhanwa KulkarniNo ratings yet
- Weg MVW3000Document334 pagesWeg MVW3000Thaylo PiresNo ratings yet
- Process Control Lab ManualDocument30 pagesProcess Control Lab ManualAkash Sundar50% (2)
- Watlow Temperature and ProcessDocument24 pagesWatlow Temperature and ProcessEliasNo ratings yet
- MTLK43ENG5Document17 pagesMTLK43ENG5Abdullah MuhammadNo ratings yet
- Heat Flow Experiment - QuanserDocument9 pagesHeat Flow Experiment - Quanserlaura romeroNo ratings yet
- Exit Conveyor Belt TWINDocument9 pagesExit Conveyor Belt TWINUsman SadikinNo ratings yet
- Boiler-Turbine Control System Design Using A Genetic AlgorithmDocument9 pagesBoiler-Turbine Control System Design Using A Genetic AlgorithmMekonnen ShewaregaNo ratings yet
- GovernorDocument93 pagesGovernorLê Trung DũngNo ratings yet
- Powertrain Control SoftwareDocument6 pagesPowertrain Control SoftwareJosé AntonioNo ratings yet
- Exp 5 PID Controller Tuning On A Real Time Temperature Control System.Document5 pagesExp 5 PID Controller Tuning On A Real Time Temperature Control System.Hardik AgravattNo ratings yet
- Transitioning From Steady State To Dynamics 1Document24 pagesTransitioning From Steady State To Dynamics 1Roger Jhosmar Soliz ArispeNo ratings yet
- Plantwide ControlDocument72 pagesPlantwide ControlAtaíde NetoNo ratings yet
- Alat CSRDocument11 pagesAlat CSROperation TewehNo ratings yet
- PWM Micrologix1100 - 1763-rm001 - En-P PDFDocument618 pagesPWM Micrologix1100 - 1763-rm001 - En-P PDFjmarcelo_pitNo ratings yet