You might also like
- Digital Technology Module 5Document5 pagesDigital Technology Module 5Akhil JNo ratings yet
- Govt College of Eng TVM Electrical Electronics SyllabusDocument112 pagesGovt College of Eng TVM Electrical Electronics SyllabusrenjithmukundanNo ratings yet
- Govt College of Eng TVM Electrical Electronics SyllabusDocument112 pagesGovt College of Eng TVM Electrical Electronics SyllabusrenjithmukundanNo ratings yet
- Electronics Components Tester (AT89C52)Document2 pagesElectronics Components Tester (AT89C52)Akhil JNo ratings yet
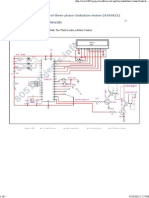
- Motor Controller Tutorial: Auto-Control-of-three-phase-Induction-motor - (AT89S52)Document1 pageMotor Controller Tutorial: Auto-Control-of-three-phase-Induction-motor - (AT89S52)Akhil JNo ratings yet
- Piezoelectric Mobile ChargerDocument18 pagesPiezoelectric Mobile Chargergmohan97No ratings yet
- Coupling A Supercapacitor With A Small Energy-Harvesting SourceDocument4 pagesCoupling A Supercapacitor With A Small Energy-Harvesting SourceAkhil JNo ratings yet
- 8051 Microcontroller ProjectsDocument2 pages8051 Microcontroller ProjectsAkhil JNo ratings yet
- 40 Makki Rev1Document10 pages40 Makki Rev1Akhil JNo ratings yet
- Digital IC Tester For 74 SeriesDocument1 pageDigital IC Tester For 74 SeriesAkhil J0% (1)
- RTD Calibration Guide: Electronics-Components-Tester - (AT89C52)Document1 pageRTD Calibration Guide: Electronics-Components-Tester - (AT89C52)Akhil JNo ratings yet
- 8051 Microcontroller Projects2Document1 page8051 Microcontroller Projects2Akhil JNo ratings yet
- Digital IC Tester For 74 SeriesDocument1 pageDigital IC Tester For 74 SeriesAkhil J0% (1)
- RTD Calibration Guide: Electronics-Components-Tester - (AT89C52)Document1 pageRTD Calibration Guide: Electronics-Components-Tester - (AT89C52)Akhil JNo ratings yet
- 8051 Microcontroller ProjectsDocument2 pages8051 Microcontroller ProjectsAkhil JNo ratings yet
- Microprocessor 8085Document12 pagesMicroprocessor 8085Akhil JNo ratings yet
- RTD Calibration Guide: Electronics-Components-Tester - (AT89C52)Document1 pageRTD Calibration Guide: Electronics-Components-Tester - (AT89C52)Akhil JNo ratings yet
- Electronics Components Tester (AT89C52)Document2 pagesElectronics Components Tester (AT89C52)Akhil JNo ratings yet
- Advanced Transmission TechnologiesDocument45 pagesAdvanced Transmission TechnologiesAkhil JNo ratings yet
- Digital IC Tester For 74 SeriesDocument1 pageDigital IC Tester For 74 SeriesAkhil J0% (1)
- Indian Tyre Companies - Passenger Car Tyres - Bais and Radial Tyres - Tyre KnowledgeDocument2 pagesIndian Tyre Companies - Passenger Car Tyres - Bais and Radial Tyres - Tyre KnowledgeAkhil JNo ratings yet
- RTD Calibration Guide: Electronics-Components-Tester - (AT89C52)Document1 pageRTD Calibration Guide: Electronics-Components-Tester - (AT89C52)Akhil JNo ratings yet
- Cell Phone Operated DTMF VehicleDocument4 pagesCell Phone Operated DTMF VehicleNaji Mahfood PulikkalNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Major Project - Grid Solving RobotDocument84 pagesMajor Project - Grid Solving RobotAshish Bharade57% (7)
- Zilog PDFDocument649 pagesZilog PDFszwzNo ratings yet
- Cse IV Computer Organization (10cs46) SolutionDocument46 pagesCse IV Computer Organization (10cs46) SolutionTasleem Arif100% (1)
- PICAXE - WikiwandDocument7 pagesPICAXE - WikiwandLuis VerenzuelaNo ratings yet
- BTECH CSE 5th 6th Sem 2020 21Document29 pagesBTECH CSE 5th 6th Sem 2020 21Rahul GoyalNo ratings yet
- Types and Components of Computer SystemsDocument31 pagesTypes and Components of Computer SystemsPratik NavaniNo ratings yet
- Migrating From 8051 - To - ARMDocument9 pagesMigrating From 8051 - To - ARMBiplab RoyNo ratings yet
- Processes and Threads ExplainedDocument34 pagesProcesses and Threads Explainedmerhatsidik melkeNo ratings yet
- CS2354 Question Bank, Previous Papers, Unit WiseDocument14 pagesCS2354 Question Bank, Previous Papers, Unit WiseVanitha VivekNo ratings yet
- 블록암호 Lea 소스코드 사용 매뉴얼 (v1.0)Document84 pages블록암호 Lea 소스코드 사용 매뉴얼 (v1.0)amal_dika5032No ratings yet
- 8085 Instruction SetDocument122 pages8085 Instruction SetgokulchandruNo ratings yet
- CSE PUT Paper MicroprocessorDocument3 pagesCSE PUT Paper Microprocessorrachit koundalNo ratings yet
- Philips Healthcare: Field Change Order ServiceDocument15 pagesPhilips Healthcare: Field Change Order ServiceJimNo ratings yet
- BMC Atrium CMDB Adapter For HP UCMDB Installation GuideDocument31 pagesBMC Atrium CMDB Adapter For HP UCMDB Installation GuideGustavo del GerboNo ratings yet
- Sports Management System Final Manuscript Group 4Document47 pagesSports Management System Final Manuscript Group 4Arlene Marie Carreon50% (4)
- Commercial Software and Data Storage DevicesDocument6 pagesCommercial Software and Data Storage Deviceskomal_daoudNo ratings yet
- 18EC62 Assignment - 2Document3 pages18EC62 Assignment - 2sundarkadadi7No ratings yet
- MPMC AakashDocument18 pagesMPMC AakashAarushi SaxenaNo ratings yet
- X-Plane Installer LogDocument3 pagesX-Plane Installer LogNoar MulajNo ratings yet
- Chapter4 9Document124 pagesChapter4 9bernabasNo ratings yet
- Prince Satta University Microprocessor HomeworkDocument12 pagesPrince Satta University Microprocessor HomeworkaaNo ratings yet
- EE309 Microprocessors and Embedded Systems-ModifiedDocument2 pagesEE309 Microprocessors and Embedded Systems-Modifiedanto5751No ratings yet
- NIOS II ProcessorDocument28 pagesNIOS II ProcessorsubashvlsiNo ratings yet
- BSc Aircraft Maintenance Course OverviewDocument35 pagesBSc Aircraft Maintenance Course OverviewAyem perumalNo ratings yet
- Application of AVX (Advanced Vector Extensions) For Improved PDFDocument8 pagesApplication of AVX (Advanced Vector Extensions) For Improved PDFRichieQCNo ratings yet
- Module2 - 8051 Instruction Set - UpdatedDocument32 pagesModule2 - 8051 Instruction Set - UpdatedPraveen G MNo ratings yet
- Shifting From Software To Hardware For Network SecurityDocument10 pagesShifting From Software To Hardware For Network SecurityJulio JordanNo ratings yet
- IFlex5 Operators Manual English 1Document48 pagesIFlex5 Operators Manual English 1Danilo MarinNo ratings yet
- Operating System and Computer Architecture ReportDocument8 pagesOperating System and Computer Architecture ReportJordan ChanNo ratings yet
- Microprocessors Lab: Multiplication and DivisionDocument11 pagesMicroprocessors Lab: Multiplication and DivisionSakthi VelNo ratings yet