You might also like
- Dynamic Modeling of PMSMDocument10 pagesDynamic Modeling of PMSMHisham Magdi El DeebNo ratings yet
- TF Armature Controlled DC MotorDocument9 pagesTF Armature Controlled DC Motoremail2vadivel100% (2)
- EE531 Lab 3Document11 pagesEE531 Lab 3ahmed113525No ratings yet
- Critical Slip and Characteristics of Induction Motor For Borehole Investigating DevicesDocument4 pagesCritical Slip and Characteristics of Induction Motor For Borehole Investigating DevicesAbdullah BokhariNo ratings yet
- Presentation On Synchronous Machine Model: Tandin Jamtsho STUDENT #3226091Document30 pagesPresentation On Synchronous Machine Model: Tandin Jamtsho STUDENT #3226091Parameswararao BillaNo ratings yet
- Cambio de FrecuenciaDocument20 pagesCambio de FrecuenciaDarness Castillo RodriguezNo ratings yet
- Analysis of Electrical Machines BankDocument66 pagesAnalysis of Electrical Machines BankChilambarasan MadhappanNo ratings yet
- Transfer functions of an armature controlled DC motorDocument7 pagesTransfer functions of an armature controlled DC motorHardik Agravatt0% (1)
- Simulation of Electric Machines and Drive Systems Using Matlab and SimulinkDocument11 pagesSimulation of Electric Machines and Drive Systems Using Matlab and SimulinkmdpkishoreNo ratings yet
- Help - Asynchronous Machine - Blocks (SimPowerSystems™) PDFDocument23 pagesHelp - Asynchronous Machine - Blocks (SimPowerSystems™) PDFnmulyonoNo ratings yet
- PSAD Slides Lec1 Synchronous Machine ModelDocument56 pagesPSAD Slides Lec1 Synchronous Machine ModelMin Khine KyawNo ratings yet
- New Updates of The First Ed.Document6 pagesNew Updates of The First Ed.Filston RukerandangaNo ratings yet
- User's Manual: D.C. Motor StudyDocument18 pagesUser's Manual: D.C. Motor Studysurendra parlaNo ratings yet
- CT Saturation from DC Offset CurrentDocument20 pagesCT Saturation from DC Offset CurrentAngga Wira PramanaNo ratings yet
- Stator Coil Pitch and Distribution Factors ExplainedDocument27 pagesStator Coil Pitch and Distribution Factors ExplainedPao Castillon0% (2)
- Delayed Current Zeros Due To Out-Of-Phase SynchronizingDocument10 pagesDelayed Current Zeros Due To Out-Of-Phase SynchronizingRui TimóteoNo ratings yet
- EE 2257-Control Systems Lab ManualDocument66 pagesEE 2257-Control Systems Lab ManualRam KumarNo ratings yet
- Sen I K: Máquinas de InducciónDocument9 pagesSen I K: Máquinas de InducciónMax PowerNo ratings yet
- IMPOSSIBLE is not a FACT. BUT an OPINIONDocument45 pagesIMPOSSIBLE is not a FACT. BUT an OPINIONMarc Quiroz Escaro100% (1)
- Rotational Dynamics and Motor ModelsDocument22 pagesRotational Dynamics and Motor ModelsfieraminaNo ratings yet
- PMSM 3Document4 pagesPMSM 3VegembogaNo ratings yet
- Induction Motor Modeling - Steady StateDocument43 pagesInduction Motor Modeling - Steady Statedivinelight100% (3)
- Line or Naturally Commutated ConvertersDocument32 pagesLine or Naturally Commutated ConvertersMichael Adu-boahenNo ratings yet
- Bài Tập Số 4 - Tiểu Luận: Trường Đại Học Tôn Đức Thắng Khoa Điện - Điện TửDocument25 pagesBài Tập Số 4 - Tiểu Luận: Trường Đại Học Tôn Đức Thắng Khoa Điện - Điện TửNguyễn Hồng HạnhNo ratings yet
- Power System Analysis: Fault Analysis Tom Overbye and Ross BaldickDocument35 pagesPower System Analysis: Fault Analysis Tom Overbye and Ross Baldicka_r_vijayanand6550No ratings yet
- BLDC Under Load PDFDocument9 pagesBLDC Under Load PDFAhmed ShoeebNo ratings yet
- Three-Phase Induction Motor Parameters and Performance CalculationsDocument4 pagesThree-Phase Induction Motor Parameters and Performance CalculationsJimmy OrajayNo ratings yet
- Induction Motor Construction and OperationDocument23 pagesInduction Motor Construction and OperationDaniyar SeytenovNo ratings yet
- Torque Ripple Calculation of The Two-Phase Permanent Magnet Synchronous Motor Supplied by A Triac ConverterDocument10 pagesTorque Ripple Calculation of The Two-Phase Permanent Magnet Synchronous Motor Supplied by A Triac Converterjeeva_ebookNo ratings yet
- An Improved State Space Average Model of Buck DC-DC Converter With All of TheDocument15 pagesAn Improved State Space Average Model of Buck DC-DC Converter With All of TheAminaNo ratings yet
- Why Induction Motors Are Commonly Used in IndustryDocument65 pagesWhy Induction Motors Are Commonly Used in IndustryAhmad Nawawi Ngah100% (1)
- Machine Simulation ModelsDocument22 pagesMachine Simulation ModelsAshwani RanaNo ratings yet
- Power Systems With MATLABDocument156 pagesPower Systems With MATLABJuan Alex Arequipa ChecaNo ratings yet
- Characteristics of Ac Servomotor: Department of Electrical and Electronics EngineeringDocument47 pagesCharacteristics of Ac Servomotor: Department of Electrical and Electronics EngineeringpragatinareshNo ratings yet
- Control System Lab Manual by AMIT KUMARDocument35 pagesControl System Lab Manual by AMIT KUMARamit kumar83% (6)
- EE 521 Analysis of Power Systems: Problem Set 1Document7 pagesEE 521 Analysis of Power Systems: Problem Set 1sayedmhNo ratings yet
- Power System Analysis: Fault Analysis Tom Overbye and Ross BaldickDocument35 pagesPower System Analysis: Fault Analysis Tom Overbye and Ross BaldickAtabat AduduNo ratings yet
- A Differential Equation For DC MotorDocument7 pagesA Differential Equation For DC MotorAhmed HwaidiNo ratings yet
- DC Servo MotorDocument6 pagesDC Servo MotortaindiNo ratings yet
- Exam Electrical Machines and Drives (ET4117) : Grid Back EMF Time (S)Document10 pagesExam Electrical Machines and Drives (ET4117) : Grid Back EMF Time (S)chidoNo ratings yet
- Solid State Drives Short BookDocument48 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- Kramer DriveDocument42 pagesKramer DriveSenthil Kumar100% (1)
- G Owacz - V13i2 - 6mathematical Model of DC Motor For Analysis of Commutation ProcesseDocument4 pagesG Owacz - V13i2 - 6mathematical Model of DC Motor For Analysis of Commutation ProcesseDante GuajardoNo ratings yet
- SalidaDocument47 pagesSalidaAriadna Sánchez CastilloNo ratings yet
- AC to AC Converter Chapter on Thyristors and Control MethodsDocument25 pagesAC to AC Converter Chapter on Thyristors and Control Methodst1m0thyNo ratings yet
- Induction Machines: Steady State Torque Speed CharacteristicDocument9 pagesInduction Machines: Steady State Torque Speed CharacteristicRyan Benjamin100% (1)
- Power System Analysis: Fault Analysis Tom Overbye and Ross BaldickDocument35 pagesPower System Analysis: Fault Analysis Tom Overbye and Ross BaldickNnaabyendu SahaNo ratings yet
- Ball and Beam Dynamics - Full ModelDocument9 pagesBall and Beam Dynamics - Full ModelMarco SouzaNo ratings yet
- 3Document44 pages3Karthik Kumar KothamasuNo ratings yet
- Full-Wave Controlled Rectifier RL Load (Continuous Mode)Document6 pagesFull-Wave Controlled Rectifier RL Load (Continuous Mode)hamza abdo mohamoud100% (1)
- Stator Winding Induction Motor in The EMTPDocument8 pagesStator Winding Induction Motor in The EMTPEleazar Sierra EspinozaNo ratings yet
- Compilation of Matlab Problems and SolutionsDocument14 pagesCompilation of Matlab Problems and SolutionsGem AguimbagNo ratings yet
- Induction Machines: Principle of Operation and Equivalent Circuit ModelDocument15 pagesInduction Machines: Principle of Operation and Equivalent Circuit ModelRyan BenjaminNo ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Advantages of IC-based Hot-Swap Circuit Protection MaximDocument7 pagesAdvantages of IC-based Hot-Swap Circuit Protection MaximJulian De MarcosNo ratings yet
- Modeling and Control of DFIG-based Variable-Speed Wind-TurbineDocument9 pagesModeling and Control of DFIG-based Variable-Speed Wind-TurbineJulian De MarcosNo ratings yet
- Controller For A Small Induction-Generator Based Wind-TurbineDocument10 pagesController For A Small Induction-Generator Based Wind-TurbineJulian De MarcosNo ratings yet
- Second Order Differential Equations HomogDocument30 pagesSecond Order Differential Equations HomogJose VillegasNo ratings yet
- Sensorless State Space Control of Elastic Two Inertia Drive System Using A Minimum State Order ObserverDocument8 pagesSensorless State Space Control of Elastic Two Inertia Drive System Using A Minimum State Order ObserverJulian De MarcosNo ratings yet
- Electric Motor Controls TutorialDocument24 pagesElectric Motor Controls Tutorialvijai daniel100% (4)
- Battery Management SystemDocument25 pagesBattery Management SystemSahishnu Shah100% (3)
- Make Field-Oriented Motor Control AffordableDocument5 pagesMake Field-Oriented Motor Control AffordableJulian De MarcosNo ratings yet
- Transients in Power SystemsDocument219 pagesTransients in Power Systemschuppa98% (41)
- 05 DC MicrogridsDocument18 pages05 DC Microgridsgopi_905No ratings yet
- Power Management GuideDocument97 pagesPower Management GuideJulian De MarcosNo ratings yet
- A Single Phase Grid Connected DC-AC Inverter With Reactive Power Control For Residential PV ApplicationDocument88 pagesA Single Phase Grid Connected DC-AC Inverter With Reactive Power Control For Residential PV ApplicationJulian De MarcosNo ratings yet
- Modeling of Mechanical SystemsDocument99 pagesModeling of Mechanical SystemsDontKnowwNo ratings yet
- Class D Audio Amplifier Basics PDFDocument14 pagesClass D Audio Amplifier Basics PDFJulian De MarcosNo ratings yet
- Modeling of Mechanical SystemsDocument99 pagesModeling of Mechanical SystemsDontKnowwNo ratings yet
- Improving EMI AccuracyDocument42 pagesImproving EMI AccuracyJulian De MarcosNo ratings yet
- Closed Loop Speed and PositionDocument9 pagesClosed Loop Speed and PositionJulian De MarcosNo ratings yet
- Introduction To Magnetic Loop AntennasDocument17 pagesIntroduction To Magnetic Loop AntennasJulian De Marcos100% (1)
- Analysis of The Chosen Speed and Flux Estimators For Sensor Less Induction Motor DriveDocument6 pagesAnalysis of The Chosen Speed and Flux Estimators For Sensor Less Induction Motor DriveJulian De MarcosNo ratings yet
- Igbt or IgctDocument6 pagesIgbt or IgctJulian De MarcosNo ratings yet
- Input Filter Interaction With Switching-Mode Power SuppliesDocument8 pagesInput Filter Interaction With Switching-Mode Power SuppliesJulian De MarcosNo ratings yet
- Gunn EffectDocument1 pageGunn EffectNerea PérezNo ratings yet
- Mini Can Cooler Based on Peltier ModuleDocument76 pagesMini Can Cooler Based on Peltier ModuleShoaibNo ratings yet
- Thermodynamics DTS-11 NVTDocument1 pageThermodynamics DTS-11 NVTUnwantedNo ratings yet
- LQuiz (TOV1) # 15 (Eng)Document5 pagesLQuiz (TOV1) # 15 (Eng)PkrNo ratings yet
- Potential Energy and Electrostatic PotentialDocument92 pagesPotential Energy and Electrostatic PotentialBanani BhattacharyaNo ratings yet
- Pre-Lab Information: Virtual Lab: Newton's Second LawDocument8 pagesPre-Lab Information: Virtual Lab: Newton's Second LawBrenda GarciaNo ratings yet
- WCU Engineering Lab ReportDocument8 pagesWCU Engineering Lab Reportallan_zirconia444No ratings yet
- Separatoare Izolate in SF6Document28 pagesSeparatoare Izolate in SF6Dumitru TănaseNo ratings yet
- BTA/BTB06 Series: 6A TriacDocument6 pagesBTA/BTB06 Series: 6A Triacheri suhaeriNo ratings yet
- Motion On An Inclined PlaneDocument55 pagesMotion On An Inclined PlaneUwyebsb JjehdbsbwNo ratings yet
- Solution ChapterDocument7 pagesSolution ChapterabhilashNo ratings yet
- D 19 NeDocument9 pagesD 19 NeEfrain PadronNo ratings yet
- Introduction To Electrical EngineeringDocument221 pagesIntroduction To Electrical EngineeringMarwin DacallosNo ratings yet
- Understanding Circular MotionDocument4 pagesUnderstanding Circular Motionjonnlin baldonadoNo ratings yet
- Measuring Earth Resistivity Using Wenner MethodDocument3 pagesMeasuring Earth Resistivity Using Wenner MethodErsi AgoNo ratings yet
- Energy Crossword 1Document2 pagesEnergy Crossword 1naremanNo ratings yet
- Water - Plumbing (Lect - 2a)Document74 pagesWater - Plumbing (Lect - 2a)k_bassyouni83% (6)
- BJT ReportDocument15 pagesBJT Reportالزهور لخدمات الانترنيتNo ratings yet
- Power Electronics DevicesDocument16 pagesPower Electronics DevicesAlessandro LorussoNo ratings yet
- Electro Topic 1-3Document40 pagesElectro Topic 1-3mc bsmareNo ratings yet
- ... Go To Air Volume Calculation Prepared by MD - Zafar ... Go To Strength & Leak TestDocument4 pages... Go To Air Volume Calculation Prepared by MD - Zafar ... Go To Strength & Leak TestJatin PatelNo ratings yet
- HA Specification - Medium & Low Voltage EquipmentDocument46 pagesHA Specification - Medium & Low Voltage Equipmentlisa1913No ratings yet
- Lab 1: Inverse Square Law LabDocument5 pagesLab 1: Inverse Square Law LabaramNo ratings yet
- Thermo 1 Exam 4Document1 pageThermo 1 Exam 4Juan KakakaNo ratings yet
- Comparison of The Performance, Advantages and Disadvantages of Nuclear Power Generation Compared To Other Clean Sources of ElectricityDocument8 pagesComparison of The Performance, Advantages and Disadvantages of Nuclear Power Generation Compared To Other Clean Sources of ElectricityMbewu M'LuNo ratings yet
- Approval of Procedure For Implementation of Uniform Renewable EnergyDocument26 pagesApproval of Procedure For Implementation of Uniform Renewable EnergyVipul KumarNo ratings yet
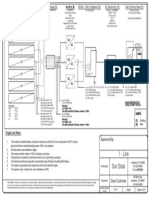
- Sample Solar Permit Plan - 1 Line Drawing PDFDocument1 pageSample Solar Permit Plan - 1 Line Drawing PDFSAEL SOLARNo ratings yet
- Mechanics & Strength of MaterialsDocument73 pagesMechanics & Strength of MaterialsOnline EducatorNo ratings yet
- Relativity: The Principle of Newtonian RelativityDocument13 pagesRelativity: The Principle of Newtonian RelativityNoviNo ratings yet
- MOL Exercise Sol EDocument28 pagesMOL Exercise Sol EOutsourcing SocietyNo ratings yet