You might also like
- How To Get A Paper AcceptedDocument3 pagesHow To Get A Paper AcceptedDrPrashant M. MenghalNo ratings yet
- PlagiarismDocument3 pagesPlagiarismDrPrashant M. MenghalNo ratings yet
- Systematic Approach To Prepare A Technical Research Paper PDFDocument5 pagesSystematic Approach To Prepare A Technical Research Paper PDFDrPrashant M. MenghalNo ratings yet
- 1 Comparison On The Performance of Induction Motor Drive Uisng Artificial Intelligent Controller PDFDocument8 pages1 Comparison On The Performance of Induction Motor Drive Uisng Artificial Intelligent Controller PDFDrPrashant M. MenghalNo ratings yet
- Dynamic Simulation of Induction Motor Drive Using Neuro ControllerDocument15 pagesDynamic Simulation of Induction Motor Drive Using Neuro ControlleridescitationNo ratings yet
- MATLAB - A Fundamental Tool For Scientific Computing and Engineering Applications - Volume 2 PDFDocument324 pagesMATLAB - A Fundamental Tool For Scientific Computing and Engineering Applications - Volume 2 PDFDrPrashant M. Menghal100% (1)
- InTech-A Virtual Laboratory Teaching and Research Tool in Control Engineering Education PDFDocument22 pagesInTech-A Virtual Laboratory Teaching and Research Tool in Control Engineering Education PDFDrPrashant M. MenghalNo ratings yet
- Fuzzy Based Real Time Control of Induction Motor DriveDocument8 pagesFuzzy Based Real Time Control of Induction Motor DriveDrPrashant M. MenghalNo ratings yet
- 5 Adaptive Neuro Fuzzy Based Dynamic Simulation of Induction Motor DrivesDocument8 pages5 Adaptive Neuro Fuzzy Based Dynamic Simulation of Induction Motor DrivesDrPrashant M. MenghalNo ratings yet
- Modelling Simulation Analysis of Induction Motor Using Artificial Intelligent Controller PDFDocument17 pagesModelling Simulation Analysis of Induction Motor Using Artificial Intelligent Controller PDFDrPrashant M. MenghalNo ratings yet
- 1 Comparative Analysis For Various Artificial Intelligence Techniques Applied To Induction Motor DriveDocument12 pages1 Comparative Analysis For Various Artificial Intelligence Techniques Applied To Induction Motor DriveDrPrashant M. MenghalNo ratings yet
- 6JNTU NCRAM-2014 Book 19 To 25 PapersDocument40 pages6JNTU NCRAM-2014 Book 19 To 25 PapersDrPrashant M. MenghalNo ratings yet
- Application of Artificial Intelligence Controller For Dynamic Simulation of Induction Motor DrivesDocument7 pagesApplication of Artificial Intelligence Controller For Dynamic Simulation of Induction Motor DrivesDrPrashant M. MenghalNo ratings yet
- Neural Network Based Dynamic PDFDocument13 pagesNeural Network Based Dynamic PDFDrPrashant M. MenghalNo ratings yet
- Application of Artificial Intelligence Controller For Dynamic Simulation of Induction Motor DrivesDocument7 pagesApplication of Artificial Intelligence Controller For Dynamic Simulation of Induction Motor DrivesDrPrashant M. MenghalNo ratings yet
- DC MachinesDocument15 pagesDC MachinesLuiz Carlos da SilvaNo ratings yet
- Application of Artificial Intelligence Controller For Dynamic Simulation of Induction Motor DrivesDocument7 pagesApplication of Artificial Intelligence Controller For Dynamic Simulation of Induction Motor DrivesDrPrashant M. MenghalNo ratings yet
- Neural Network Based Dynamic PDFDocument13 pagesNeural Network Based Dynamic PDFDrPrashant M. MenghalNo ratings yet
- Induction Motor Steady-State Model: SEE 3433 Mesin ElektrikDocument38 pagesInduction Motor Steady-State Model: SEE 3433 Mesin ElektrikDrPrashant M. MenghalNo ratings yet
- Simulation of Radar Topology Networks To Evolve The Electronic Warfare Survivability MetricsDocument5 pagesSimulation of Radar Topology Networks To Evolve The Electronic Warfare Survivability MetricsDrPrashant M. MenghalNo ratings yet
- 2 Adaptive Neuro-Fuzzy Inference System (ANFIS) Based Simulation of Induction Motor Drives PDFDocument14 pages2 Adaptive Neuro-Fuzzy Inference System (ANFIS) Based Simulation of Induction Motor Drives PDFDrPrashant M. MenghalNo ratings yet
- InTech-A Virtual Laboratory Teaching and Research Tool in Control Engineering Education PDFDocument22 pagesInTech-A Virtual Laboratory Teaching and Research Tool in Control Engineering Education PDFDrPrashant M. MenghalNo ratings yet
- MATLAB Simulation of DC ServomechanismDocument4 pagesMATLAB Simulation of DC ServomechanismDrPrashant M. MenghalNo ratings yet
- Real Time Control of Electrical Machine Drives A Review - PresentedDocument7 pagesReal Time Control of Electrical Machine Drives A Review - PresentedDrPrashant M. MenghalNo ratings yet
- Nature of Electrical Supply CharacteristicsDocument27 pagesNature of Electrical Supply CharacteristicsDrPrashant M. MenghalNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- EO and EO-2 Metric Bite Type Fittings: The Fitting AuthorityDocument62 pagesEO and EO-2 Metric Bite Type Fittings: The Fitting AuthorityZahir KhiraNo ratings yet
- Reservoir Modelling & Simulation GuideDocument96 pagesReservoir Modelling & Simulation GuideyouungNo ratings yet
- CBIP draft meter standardsDocument22 pagesCBIP draft meter standardslalit123indiaNo ratings yet
- Engineering Circuit Analysis 7th Edition: Chapter 17 SolutionDocument50 pagesEngineering Circuit Analysis 7th Edition: Chapter 17 SolutionTaif ArifNo ratings yet
- Lewis Structures and Shape of Molecules and HybridizationDocument12 pagesLewis Structures and Shape of Molecules and HybridizationsanjuanaomiNo ratings yet
- Primary Reformer TubesDocument10 pagesPrimary Reformer TubesAhmed ELmlahyNo ratings yet
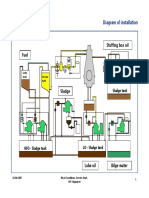
- Westfalia Separator Installation DiagramDocument68 pagesWestfalia Separator Installation DiagramOno Jr Araza100% (3)
- h2 PR Final Key SP 13Document3 pagesh2 PR Final Key SP 13George ConstantinouNo ratings yet
- Temperature Effect On Voc and IscDocument5 pagesTemperature Effect On Voc and IscAnonymous bVLovsnNo ratings yet
- Bond Enthalpies 1 QPDocument8 pagesBond Enthalpies 1 QPRabia RafiqueNo ratings yet
- Equipment DetailsDocument10 pagesEquipment Detailsimranjani.skNo ratings yet
- Plain Bearings Made From Engineering PlasticsDocument44 pagesPlain Bearings Made From Engineering PlasticsJani LahdelmaNo ratings yet
- Dss Paper 1Document2 pagesDss Paper 1hemalNo ratings yet
- Pipe Flow Expert BrochureDocument2 pagesPipe Flow Expert BrochurecristinelbNo ratings yet
- Microelectronics: Circuit Analysis and Design, 4 Edition by D. A. Neamen Problem SolutionsDocument6 pagesMicroelectronics: Circuit Analysis and Design, 4 Edition by D. A. Neamen Problem SolutionsJano Jesus AlexNo ratings yet
- SCADADocument14 pagesSCADANunna BaskarNo ratings yet
- Series - Parallel-RLC CKT EquationDocument13 pagesSeries - Parallel-RLC CKT EquationEjaz MahfuzNo ratings yet
- Problem Solving 1 Arithmetic SequenceDocument62 pagesProblem Solving 1 Arithmetic SequenceCitrus National High SchoolNo ratings yet
- Directions: Answer The Following Question(s) .: A. B. C. D. E. FDocument6 pagesDirections: Answer The Following Question(s) .: A. B. C. D. E. FdiamondtressNo ratings yet
- General Types of Intermolecular Forces 11-LDocument33 pagesGeneral Types of Intermolecular Forces 11-LClarenz N. Turan100% (1)
- M.SC - Physics 3rd Sem FinalDocument12 pagesM.SC - Physics 3rd Sem FinalKhileswar ChandiNo ratings yet
- Black HoleDocument2 pagesBlack HoleLouis Fetilo Fabunan0% (1)
- Lecture Notes in Computational Science and EngineeringDocument434 pagesLecture Notes in Computational Science and Engineeringmuhammad nurulNo ratings yet
- Managing Economies of Scale in Supply ChainsDocument25 pagesManaging Economies of Scale in Supply ChainsWei JunNo ratings yet
- 12 Translations PDFDocument4 pages12 Translations PDFTeo Lee Hong0% (1)
- Irfp4768Pbf: Application V 250V R 14.5M 17.5M I 93ADocument9 pagesIrfp4768Pbf: Application V 250V R 14.5M 17.5M I 93AKrishna InamdarNo ratings yet
- Qualcomm Snapdragon 660 Mobile Platform Product BriefDocument2 pagesQualcomm Snapdragon 660 Mobile Platform Product BriefTuxInfoNo ratings yet
- QNX Neutrino RTOS Building Embedded SystemsDocument248 pagesQNX Neutrino RTOS Building Embedded SystemsLarken BradynNo ratings yet
- Daily Test Class 11 - 4thDocument5 pagesDaily Test Class 11 - 4thDebby GraciaNo ratings yet
- Criteria Cogni+Ve Ap+Tude Style Free Test: AssessmentdayDocument15 pagesCriteria Cogni+Ve Ap+Tude Style Free Test: AssessmentdayRahul SharmaNo ratings yet