You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Electrical One Line Diag PDFDocument5 pagesElectrical One Line Diag PDFahs beinNo ratings yet
- EE311 Electric Drives Control For Automation PDFDocument2 pagesEE311 Electric Drives Control For Automation PDFAmalNo ratings yet
- 11 KV Oh CapacitorDocument1 page11 KV Oh CapacitorMosa Elnaid ElnaidNo ratings yet
- M0097147M0097147-00 SisDocument8 pagesM0097147M0097147-00 SisNicole SmithNo ratings yet
- 1SBL367001R1300 Af52 30 00 13Document6 pages1SBL367001R1300 Af52 30 00 13NISHANNo ratings yet
- 1000KVA Short Circuit Test KEMADocument40 pages1000KVA Short Circuit Test KEMABash Mat100% (1)
- Ah1222 CP PDFDocument1 pageAh1222 CP PDFAlfredo Fdez BandalaNo ratings yet
- Statcom PDFDocument77 pagesStatcom PDFMohan ThakreNo ratings yet
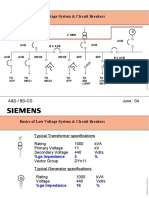
- Basics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04Document17 pagesBasics of Low Voltage System & Circuit Breakers: A&D / BD-CD June 04kodandaram100% (1)
- Extra-Low Voltage - WikipediaDocument4 pagesExtra-Low Voltage - WikipediaNelsonNo ratings yet
- Chapter 2Document7 pagesChapter 2Shin Se Kyung100% (1)
- DB Schedule PDFDocument9 pagesDB Schedule PDFMohamed FaragNo ratings yet
- Unit 5Document31 pagesUnit 5rajdattaNo ratings yet
- Duro-Test Lamp Catalog 1985Document34 pagesDuro-Test Lamp Catalog 1985Alan Masters100% (2)
- Midterm 1Document3 pagesMidterm 1tt_aljobory3911No ratings yet
- Brosur PJU TALLEDDocument1 pageBrosur PJU TALLEDMulja RizolaNo ratings yet
- Calculate Size of Main ELCB & Brach MCBDocument6 pagesCalculate Size of Main ELCB & Brach MCBHamid Khan0% (1)
- Met 2Document225 pagesMet 2Pranav kant100% (1)
- Victor VC830L ManualDocument3 pagesVictor VC830L ManualSidney Sant'Anna LeiteNo ratings yet
- EPA07 MBE 4000 Standard Grid Heater Relay Installation InstructionsDocument6 pagesEPA07 MBE 4000 Standard Grid Heater Relay Installation InstructionsАндрейNo ratings yet
- Half Wave RectifierDocument12 pagesHalf Wave RectifierRishav PrasadNo ratings yet
- Cable For Addressable Fire Alarm SystemDocument1 pageCable For Addressable Fire Alarm Systemnoonbcc130100% (1)
- UCM224D - Technical Data SheetDocument8 pagesUCM224D - Technical Data Sheet3efooNo ratings yet
- Smart On Line SUINT2000XL PDFDocument36 pagesSmart On Line SUINT2000XL PDFjoel alcarraz vivasNo ratings yet
- Eaton Y7 194690 HNC 25 2 003 en - GBDocument2 pagesEaton Y7 194690 HNC 25 2 003 en - GBdlm_aqp5304No ratings yet
- NSN Rectifier ManualDocument25 pagesNSN Rectifier ManualpetermamdouhraoufNo ratings yet
- 2.1concentric WindingDocument17 pages2.1concentric Windingzelalem walieNo ratings yet
- Otis Sigma SI210 PDFDocument345 pagesOtis Sigma SI210 PDFAnthony Rafaga Ortiz91% (11)
- Bridge Rectifier: Circuit Diagram & Its WorkingDocument12 pagesBridge Rectifier: Circuit Diagram & Its WorkingChandra Sekhar CNo ratings yet