You might also like
- Usinas hidrelétricas e centrais elétricas a diesel: exercícios práticos e comentadosFrom EverandUsinas hidrelétricas e centrais elétricas a diesel: exercícios práticos e comentadosNo ratings yet
- Hidráulica em PontesDocument22 pagesHidráulica em PontesRodrigo SoaresNo ratings yet
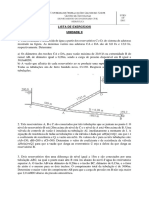
- Lista de ExerciciosDocument22 pagesLista de ExerciciosRafael Schmitzhaus100% (1)
- Turbomáquinas Hidráulicas - Aulas 11 e 12 - Semelhança Aplicada As Máquinas de Fluxo - ECS PDFDocument43 pagesTurbomáquinas Hidráulicas - Aulas 11 e 12 - Semelhança Aplicada As Máquinas de Fluxo - ECS PDFespantaselvaNo ratings yet
- Perda de carga em tubulações e sistemas hidráulicosDocument7 pagesPerda de carga em tubulações e sistemas hidráulicosDébora RibeiroNo ratings yet
- Sebenta H2 V1-2aDocument42 pagesSebenta H2 V1-2aed-santos100% (1)
- Curva característica de bomba centrífuga e ponto de operaçãoDocument38 pagesCurva característica de bomba centrífuga e ponto de operaçãoFrancesco SicaNo ratings yet
- Resumo de Saneamento (PHA3412)Document157 pagesResumo de Saneamento (PHA3412)Felipe Ramires NeudlNo ratings yet
- Hidraulica Geral - Listas de ExerciciosDocument5 pagesHidraulica Geral - Listas de ExerciciosJcBushNo ratings yet
- Ponte Levadiça - Solução para Trânsito Rodoviário e Aquaviário PDFDocument17 pagesPonte Levadiça - Solução para Trânsito Rodoviário e Aquaviário PDFRoberta MariaNo ratings yet
- 4 Perda de Carga ContínuaDocument23 pages4 Perda de Carga ContínuaDaniel Teles100% (3)
- Lista de exercícios de continuidade e equação de BernoulliDocument4 pagesLista de exercícios de continuidade e equação de BernoulliNircele LealNo ratings yet
- Lista Exercícios Hidráulica 2undDocument10 pagesLista Exercícios Hidráulica 2undVinicius AlvesNo ratings yet
- Lei de OhmDocument32 pagesLei de Ohmapi-3702401100% (2)
- Dimensionamento de Sistemas ElevatóriosDocument6 pagesDimensionamento de Sistemas ElevatóriosMatheusRadio Vieira0% (1)
- Lista de exercícios drenagem urbanaDocument2 pagesLista de exercícios drenagem urbanaErick AmâncioNo ratings yet
- Introdução Mecânica Dos Fluidos PDFDocument42 pagesIntrodução Mecânica Dos Fluidos PDFAnna DotsonNo ratings yet
- Sistemas Termodinâmicos e Conceitos BásicosDocument7 pagesSistemas Termodinâmicos e Conceitos BásicosMarcio WagnerNo ratings yet
- FTC Hidráulica exercícios velocidade descarga pressãoDocument3 pagesFTC Hidráulica exercícios velocidade descarga pressãoBianca PatrícioNo ratings yet
- Sistema de Ensaio de Bombas CentrífugasDocument7 pagesSistema de Ensaio de Bombas CentrífugasDeborah AlmeidaNo ratings yet
- Resistência de paredes internas de condutos ao escoamentoDocument54 pagesResistência de paredes internas de condutos ao escoamentoLucas OliveiraNo ratings yet
- Curso de Engenharia Civil - Topografia IDocument4 pagesCurso de Engenharia Civil - Topografia IIvana Santos GuimarãesNo ratings yet
- Aula 3 - Sistemas de Esgotamento Sanitário - Parte 1Document137 pagesAula 3 - Sistemas de Esgotamento Sanitário - Parte 1Gabriel ResendeNo ratings yet
- MF fluxo conceitosDocument10 pagesMF fluxo conceitosjmnascenteNo ratings yet
- Drag and Lift Forces in Fluid MechanicsDocument22 pagesDrag and Lift Forces in Fluid MechanicsMary_Jane_FNo ratings yet
- Tese de Licenciatura em Engenharia Hidraulica - Qualidade de Agua SubterrâneaDocument88 pagesTese de Licenciatura em Engenharia Hidraulica - Qualidade de Agua SubterrâneaNicolau Gabriel100% (2)
- 2º Unidade - SaneamentoDocument3 pages2º Unidade - SaneamentoMariana MendesNo ratings yet
- Escoamento Variado..Document11 pagesEscoamento Variado..Jose Costa FilhoNo ratings yet
- Propriedades Mecânicas Dos MateriaisDocument11 pagesPropriedades Mecânicas Dos MateriaisraynebatistaNo ratings yet
- Regimes de Escoamento em CanaisDocument19 pagesRegimes de Escoamento em CanaismmmarciaNo ratings yet
- Associação de Bombas em Série e Paralelo.d OcxDocument16 pagesAssociação de Bombas em Série e Paralelo.d OcxLucastreds75% (4)
- Curva bomba URBDocument24 pagesCurva bomba URBJéssica BlasiusNo ratings yet
- Estudo de Caso de Drenagem Urbana MaringaDocument29 pagesEstudo de Caso de Drenagem Urbana MaringaAndre TurraNo ratings yet
- Ha-07-Golpe de ArieteDocument21 pagesHa-07-Golpe de ArieteWillian CambaoNo ratings yet
- Bombas e instalações de bombeamentoDocument52 pagesBombas e instalações de bombeamentoSidney Pereira JuniorNo ratings yet
- Água e Esgoto-Coleta de amostras-CAEAv2Document128 pagesÁgua e Esgoto-Coleta de amostras-CAEAv2colvara1No ratings yet
- Teorema de Bernoulli e aplicações práticasDocument13 pagesTeorema de Bernoulli e aplicações práticasHalley WanderbakNo ratings yet
- Dimensionamento estação bombeamento bairroDocument57 pagesDimensionamento estação bombeamento bairroAlexandre VieiraNo ratings yet
- Cálculos de vazão e perda de carga em sistemas de abastecimento de águaDocument2 pagesCálculos de vazão e perda de carga em sistemas de abastecimento de águaRoberta VasconcelosNo ratings yet
- Bomba centrífuga: funcionamento e aplicaçõesDocument26 pagesBomba centrífuga: funcionamento e aplicaçõesFelix TsecoNo ratings yet
- Classificação e dimensionamento de adutorasDocument68 pagesClassificação e dimensionamento de adutorasIan Reis PezosNo ratings yet
- Experimento 1.reynoldsDocument9 pagesExperimento 1.reynoldsBruna Ops IvanNo ratings yet
- Aula - Triângulo de VelocidadesDocument30 pagesAula - Triângulo de VelocidadesCaio ValérioNo ratings yet
- Capitulo3 BombasclassificacaoedescricaoDocument30 pagesCapitulo3 BombasclassificacaoedescricaoJulynara FrotaNo ratings yet
- 8 - Curva de Bomba e de Sistema de TubulaçõesDocument11 pages8 - Curva de Bomba e de Sistema de TubulaçõesJoseane VieiraNo ratings yet
- Memória Descritiva CorrigidoDocument32 pagesMemória Descritiva CorrigidoRúben LopesNo ratings yet
- (Manual) Plano Diretor de Drenagem Urbana de Curitiba - Manual de DrenagemDocument152 pages(Manual) Plano Diretor de Drenagem Urbana de Curitiba - Manual de DrenagemMarcos JulianoNo ratings yet
- Hidráulica Agrícola: Exercícios de Perdas de Carga em CondutasDocument23 pagesHidráulica Agrícola: Exercícios de Perdas de Carga em CondutasRuana VianaNo ratings yet
- Condutos livres ou canais naturais e artificiaisDocument106 pagesCondutos livres ou canais naturais e artificiaisLeonardo AndrequeNo ratings yet
- 5 - Como Entender Com Facilidade A Física PDFDocument3 pages5 - Como Entender Com Facilidade A Física PDFRodrigo SerapiaoNo ratings yet
- Bateria De Gravidade: Convertendo energia gravitacional em eletricidadeFrom EverandBateria De Gravidade: Convertendo energia gravitacional em eletricidadeNo ratings yet
- Perda Real de Água: nível de desempenho do sistema de distribuição em Vitória-ESFrom EverandPerda Real de Água: nível de desempenho do sistema de distribuição em Vitória-ESNo ratings yet
- Acionamentos Elétricos na AutomaçãoDocument13 pagesAcionamentos Elétricos na Automaçãojdionisio20120% (1)
- Motores de Indução: Lista de Exercícios e ConceitosDocument15 pagesMotores de Indução: Lista de Exercícios e ConceitosGabriel Ramon de BritoNo ratings yet
- Introdução às Máquinas ElétricasDocument110 pagesIntrodução às Máquinas Elétricascarioca 007No ratings yet
- Frenagem Regenerativa em Motores de Corrente ContínuaDocument8 pagesFrenagem Regenerativa em Motores de Corrente ContínuaAdailton FreitasNo ratings yet
- Acionamento de motores de indução com inversores de frequênciaDocument45 pagesAcionamento de motores de indução com inversores de frequênciaJair SousaNo ratings yet
- Artigo Inversor de FrequênciaDocument11 pagesArtigo Inversor de FrequênciaFelipe della ViaNo ratings yet
- Frenagem Corrente de FoucaultDocument8 pagesFrenagem Corrente de FoucaultFred SilvaNo ratings yet
- Inversor de Frequência Com Acionamento de Motor: Frequency Inverter With Motor DriveDocument22 pagesInversor de Frequência Com Acionamento de Motor: Frequency Inverter With Motor DriveEletrônica IndustrialNo ratings yet
- Micro Sistem Philco Com DVD Mod. PH 671Document11 pagesMicro Sistem Philco Com DVD Mod. PH 671Djalma MotaNo ratings yet
- O Nome Divino por Extenso revela os Mistérios do UniversoDocument35 pagesO Nome Divino por Extenso revela os Mistérios do UniversoYosef Mori100% (2)
- ELETROSTÁTICA - FORÇA ELÉTRICA e ELETRIZAÇÃODocument7 pagesELETROSTÁTICA - FORÇA ELÉTRICA e ELETRIZAÇÃOKauan OliveiraNo ratings yet
- Questões Aula Física 1-6Document8 pagesQuestões Aula Física 1-6João LuísNo ratings yet
- Exercícios para Revisão - LaboratórioDocument5 pagesExercícios para Revisão - LaboratórioAna Laura Siqueira Miranda100% (3)
- Análise do funcionamento e propriedades de um amplificador diferencialDocument8 pagesAnálise do funcionamento e propriedades de um amplificador diferencialMarco Vinicius Uchida MeloNo ratings yet
- EletrogravimetriaDocument4 pagesEletrogravimetriapedroaugusto1313No ratings yet
- Cap 4 ProvaDocument5 pagesCap 4 ProvaEsdras FerrazNo ratings yet
- Padrão de estruturas de redes de distribuição aéreaDocument247 pagesPadrão de estruturas de redes de distribuição aéreaEdgar AzevedoNo ratings yet
- Instalacão Econoluz BifasicoDocument2 pagesInstalacão Econoluz BifasicoDenilton Mark CarmelloNo ratings yet
- 7sr11 7sr12 Argus Sheet (1) .En - PTDocument24 pages7sr11 7sr12 Argus Sheet (1) .En - PTJonathan MoraesNo ratings yet
- SIMULADO AV1 e AV2Document56 pagesSIMULADO AV1 e AV2Edney RamosNo ratings yet
- Resistência Dos MateriaisDocument216 pagesResistência Dos MateriaisJuliano BorgesNo ratings yet
- Teste Fontes SIEMENS SIMODRIVE 611Document2 pagesTeste Fontes SIEMENS SIMODRIVE 611LucasNo ratings yet
- UNIVERSIDADE POLITÉCNICA Plano Analitico Fisica 1Document8 pagesUNIVERSIDADE POLITÉCNICA Plano Analitico Fisica 1EddyNo ratings yet
- (32 ENEM) Cronograma Gratuito de 32 Semanas para o Enem 2024 Com o Ferretto-2Document96 pages(32 ENEM) Cronograma Gratuito de 32 Semanas para o Enem 2024 Com o Ferretto-2vivihgiovannaxNo ratings yet
- Padronização de serviços de calibração acreditadosDocument42 pagesPadronização de serviços de calibração acreditadosCarlos RogérioNo ratings yet
- Determinação da gravidade por experimentos de queda livreDocument3 pagesDeterminação da gravidade por experimentos de queda livreCarllos LimmaNo ratings yet
- Movimento harmônico simples - resolução de atividadesDocument13 pagesMovimento harmônico simples - resolução de atividadesDias DiasNo ratings yet
- Análise da estabilidade de tensão em sistemas elétricos de potênciaDocument139 pagesAnálise da estabilidade de tensão em sistemas elétricos de potênciaBruno AlvesNo ratings yet
- Apostila - Comandos de Voo IDocument28 pagesApostila - Comandos de Voo IEduardo Barbosa BessaNo ratings yet
- Mecânica Dos Fluidos PDFDocument256 pagesMecânica Dos Fluidos PDFLuisfãnyo Styfler100% (1)
- UF-1183-ANQ AP 01 - Variadores Velocidade - Instalacao e EnsaioDocument74 pagesUF-1183-ANQ AP 01 - Variadores Velocidade - Instalacao e EnsaioFábio Leite100% (5)
- HTTP - Eletronicasilveira - Forumeiros.com - t4618 Como Modificar Uma Fomte Atx Com Ci 2005z PDFDocument11 pagesHTTP - Eletronicasilveira - Forumeiros.com - t4618 Como Modificar Uma Fomte Atx Com Ci 2005z PDFluis.sinatoNo ratings yet
- Painel solar policristalino 260-340WpDocument2 pagesPainel solar policristalino 260-340WpJose Maria SartoNo ratings yet
- Máquinas Elétricas I - Lista de ExercíciosDocument6 pagesMáquinas Elétricas I - Lista de ExercíciosIsrael FélixNo ratings yet
- Confirmação de Encomenda: SEW-EURODRIVE Brasil LtdaDocument80 pagesConfirmação de Encomenda: SEW-EURODRIVE Brasil LtdaMateus das Neves OlímpioNo ratings yet
- Ressonância Harmônica - Você Cria A Sua Própria RealidadeDocument118 pagesRessonância Harmônica - Você Cria A Sua Própria RealidadeMiguelBrandãoNo ratings yet
- Manual Retificadora PÍCCOLADocument6 pagesManual Retificadora PÍCCOLAPaulo João AlvesNo ratings yet
- Semana 3 - Cap 24 e 25Document94 pagesSemana 3 - Cap 24 e 25Gabriela MascenaNo ratings yet