You might also like
- ISO 9001 Lead Auditor PDFDocument1 pageISO 9001 Lead Auditor PDFmdasifkhan201350% (2)
- Chevy Differentials: How to Rebuild the 10- and 12-BoltFrom EverandChevy Differentials: How to Rebuild the 10- and 12-BoltRating: 5 out of 5 stars5/5 (8)
- Cswip 3.1 Welding Inspector - Multiple Choice Question, Dec 7, 2007Document43 pagesCswip 3.1 Welding Inspector - Multiple Choice Question, Dec 7, 2007claytoninf87% (30)
- Practice Multi Choice Questions: Page 1 of 32Document32 pagesPractice Multi Choice Questions: Page 1 of 32mdasifkhan2013100% (3)
- Requirements ISO 3834Document76 pagesRequirements ISO 3834mdasifkhan2013100% (7)
- Baja India 2010 Design Report VAJRADocument8 pagesBaja India 2010 Design Report VAJRAPranav RawatNo ratings yet
- GB Pant Engineering College - BAJA SAE India 2014 - DesignReportDocument8 pagesGB Pant Engineering College - BAJA SAE India 2014 - DesignReportvardaan510No ratings yet
- Design Project TwoDocument10 pagesDesign Project Twogeletayaadii100% (1)
- Baja Design ReportDocument9 pagesBaja Design ReportRishi KumarNo ratings yet
- Baja Design Report PDFDocument9 pagesBaja Design Report PDFZubair HussainNo ratings yet
- Project Report On ATV Prototype BAJA SAE INDIADocument60 pagesProject Report On ATV Prototype BAJA SAE INDIAsanket50% (6)
- Abstract:: Design Report For Baja Saeindia 2018Document10 pagesAbstract:: Design Report For Baja Saeindia 2018AndhdNo ratings yet
- 08 F2010 ReportDocument80 pages08 F2010 ReportAnantjain93No ratings yet
- Shock Absorber Test RigDocument14 pagesShock Absorber Test RigOmKar GunjalNo ratings yet
- Construction of A Constant Mesh Gear BoxDocument21 pagesConstruction of A Constant Mesh Gear BoxAmare Eshetie0% (1)
- Ev Design Report 2018Document6 pagesEv Design Report 2018Williams PoeNo ratings yet
- FSAE PowerTrain Phase 4 NNDocument80 pagesFSAE PowerTrain Phase 4 NNAnonymous NK2QBE9oNo ratings yet
- 1 Final Technical Report Mini BajaDocument14 pages1 Final Technical Report Mini BajaLucasNo ratings yet
- 272 Concept Class Mansoura University DR Rev 2Document8 pages272 Concept Class Mansoura University DR Rev 2Gazzara WorldNo ratings yet
- WCE2015 pp1283-1286 PDFDocument4 pagesWCE2015 pp1283-1286 PDFAftaab AlamNo ratings yet
- Design and Analysis of Modified Front Double Wishbone Suspension For A Three Wheel Hybrid VehicleDocument4 pagesDesign and Analysis of Modified Front Double Wishbone Suspension For A Three Wheel Hybrid VehicleRima AroraNo ratings yet
- Shock Absorber DynamometerDocument19 pagesShock Absorber DynamometerUmanath R Poojary100% (1)
- Wheel Balancing MachineDocument26 pagesWheel Balancing MachinePatrick Marc Brunelle100% (2)
- Racetrack Raiders MNIT, JaipurDocument13 pagesRacetrack Raiders MNIT, JaipurKartikey SharmaNo ratings yet
- Static and Dynamic Analysis of Suspension SystemDocument6 pagesStatic and Dynamic Analysis of Suspension SystemTrbvmNo ratings yet
- ReportDocument5 pagesReportapi-281316772No ratings yet
- Baja Sae Design ReportDocument14 pagesBaja Sae Design Reportlucky_agrawal45No ratings yet
- Brake Report 2015Document38 pagesBrake Report 2015Pratyush NagareNo ratings yet
- Car Body Design Project ReportDocument43 pagesCar Body Design Project ReportMassimiliano Pezzo0% (1)
- BAJA Design ReportDocument55 pagesBAJA Design ReportGauravNo ratings yet
- Design and Analysis of An All Terrain Vehicle: Gaurav S. Chimote, Kartik P. Rajas, Alok Kumar MishraDocument5 pagesDesign and Analysis of An All Terrain Vehicle: Gaurav S. Chimote, Kartik P. Rajas, Alok Kumar MishraupadhyaysanuNo ratings yet
- Zeorth ReviewDocument12 pagesZeorth Reviewhariprasathm01No ratings yet
- Design & Fabrication of Rear Outboard Wheel Assembly For An ATVDocument5 pagesDesign & Fabrication of Rear Outboard Wheel Assembly For An ATVumeshNo ratings yet
- MET2013 Hinojosa RicardoDocument27 pagesMET2013 Hinojosa RicardoAmal GeorgeNo ratings yet
- Technical Report - Steering (Fall 2007)Document26 pagesTechnical Report - Steering (Fall 2007)Mahmoud El-MahdyNo ratings yet
- ROLL CAGE DESIGNDocument22 pagesROLL CAGE DESIGNRahul ReddyNo ratings yet
- Design and Fabrication of Race Spec Go-KartDocument6 pagesDesign and Fabrication of Race Spec Go-KartAJER JOURNALNo ratings yet
- Structural Analysis of Double-Wishbone Suspension SystemDocument7 pagesStructural Analysis of Double-Wishbone Suspension SystemIJRASETPublicationsNo ratings yet
- Baja Design ReportDocument17 pagesBaja Design ReportsarthakashNo ratings yet
- SAE BAJA 2013 Preliminary Design ReportDocument10 pagesSAE BAJA 2013 Preliminary Design Reportrudey18No ratings yet
- Book - Gears - IndiaDocument12 pagesBook - Gears - IndiadesetekNo ratings yet
- Analysis of Alternative Front Suspension Systems For MotorcyclesDocument10 pagesAnalysis of Alternative Front Suspension Systems For MotorcyclesRasbin SharmaNo ratings yet
- Optimal Rocker Arm DesignasdDocument5 pagesOptimal Rocker Arm DesignasdShubham DeshmukhNo ratings yet
- Design Development and Analysis of Braking System For Student Formula Race CarDocument6 pagesDesign Development and Analysis of Braking System For Student Formula Race Carabdelhameed saedNo ratings yet
- Design and Optimization of Front Wheel AssemblyDocument69 pagesDesign and Optimization of Front Wheel Assemblynikhil pandkarNo ratings yet
- Complete Design Report Team JaabazDocument89 pagesComplete Design Report Team JaabazpiyushnsitNo ratings yet
- Designing Suspension for Terrain VehicleDocument6 pagesDesigning Suspension for Terrain VehicleSami Onur VuralNo ratings yet
- Preliminary Design Report for Single-Seat Racing VehicleDocument8 pagesPreliminary Design Report for Single-Seat Racing VehicleAman MaanNo ratings yet
- Simulation of Vehicle Response To Throttle Tip-In and Tip-OutDocument38 pagesSimulation of Vehicle Response To Throttle Tip-In and Tip-OutPablo EscobarNo ratings yet
- Wheel Balancing Machine Design for Cars and MotorcyclesDocument26 pagesWheel Balancing Machine Design for Cars and MotorcyclesSrinivas100% (1)
- I JR Et 20150404003 JJJDocument9 pagesI JR Et 20150404003 JJJSuresh YadavNo ratings yet
- Maharashtra Board Automobile Transmission ExamDocument17 pagesMaharashtra Board Automobile Transmission ExamPrathamesh GothankarNo ratings yet
- Chen O Et Al ENPH 459 2013Document27 pagesChen O Et Al ENPH 459 2013LllNo ratings yet
- Design and Simulation of Drive Train For An Electric Two VehicleDocument25 pagesDesign and Simulation of Drive Train For An Electric Two VehiclekunalNo ratings yet
- ME 3011 Kinematics & Dynamics Capstone ReportDocument20 pagesME 3011 Kinematics & Dynamics Capstone ReportMuhammad Hussain Bilal100% (1)
- Abstract:: Design Modification and Analysis of V6 Engine Mounting BracketDocument7 pagesAbstract:: Design Modification and Analysis of V6 Engine Mounting BracketInternational Journal of Engineering and TechniquesNo ratings yet
- ICRSET'14 Conference PaperDocument8 pagesICRSET'14 Conference PaperAnkitRajNo ratings yet
- Design UprightDocument5 pagesDesign UprightJohn HopkinsNo ratings yet
- Machine Design Project IIDocument5 pagesMachine Design Project IIYigremachew bizualew AyenewNo ratings yet
- Go Kart REPORTDocument5 pagesGo Kart REPORTRayleighNo ratings yet
- 12159Document27 pages12159NobodyNo ratings yet
- Robust Yaw Stability Controller Design and Hardware-In-The-Loop Testing For A Road VehicleDocument18 pagesRobust Yaw Stability Controller Design and Hardware-In-The-Loop Testing For A Road VehicleBejai Alexander MathewNo ratings yet
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
- Tax Invoice for Book Sale and ShippingDocument1 pageTax Invoice for Book Sale and ShippingTanu ShreeNo ratings yet
- Evaluation of Academic Performance of Students With Fuzzy LogicDocument2 pagesEvaluation of Academic Performance of Students With Fuzzy LogicAnonymous pdetHR3No ratings yet
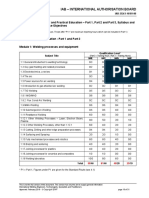
- IWE SyllabusDocument4 pagesIWE Syllabusmdasifkhan2013No ratings yet
- Tax Invoice for Book PurchaseDocument1 pageTax Invoice for Book Purchasechaitanya chaitanyaNo ratings yet
- Block 1 MEC 001 Unit 1Document19 pagesBlock 1 MEC 001 Unit 1Anil RaiNo ratings yet
- Career Objective: - : Bashirul MustafaDocument3 pagesCareer Objective: - : Bashirul Mustafamdasifkhan2013No ratings yet
- Yearly Prayer Times 2019 - IslamicFinderDocument7 pagesYearly Prayer Times 2019 - IslamicFindermdasifkhan2013No ratings yet
- Md. Mosarraf Hossain's Professional ExperienceDocument1 pageMd. Mosarraf Hossain's Professional Experiencemdasifkhan2013No ratings yet
- H PG Economics EDocument61 pagesH PG Economics ERupesh NewtonNo ratings yet
- 3 Piece Men SuitDocument1 page3 Piece Men Suitmdasifkhan2013No ratings yet
- PNR/Booking Ref.: XPBV7KDocument3 pagesPNR/Booking Ref.: XPBV7Kmdasifkhan2013No ratings yet
- Theory of ProductionDocument25 pagesTheory of ProductionRanjeet KumarNo ratings yet
- 250+ C Programs For Practice PDFDocument13 pages250+ C Programs For Practice PDFrazi100% (1)
- Identitas AljabarDocument3 pagesIdentitas AljabarAgung TriatmojoNo ratings yet
- Preheat Formula PDFDocument1 pagePreheat Formula PDFmdasifkhan2013No ratings yet
- Identitas AljabarDocument3 pagesIdentitas AljabarAgung TriatmojoNo ratings yet
- Filler Metal Matching PDFDocument3 pagesFiller Metal Matching PDFchowhkNo ratings yet
- Ferrite Number TestingDocument8 pagesFerrite Number Testingmckhooleetz11No ratings yet
- Personal Information: Application Form: Jharkhand Police Sub Inspector Competitive Examination 2017Document2 pagesPersonal Information: Application Form: Jharkhand Police Sub Inspector Competitive Examination 2017mdasifkhan2013No ratings yet
- ARC Welding: Name N AWS Characteristics ApplicationsDocument1 pageARC Welding: Name N AWS Characteristics Applicationsmdasifkhan2013No ratings yet
- CH 01Document29 pagesCH 01mdasifkhan2013No ratings yet
- SQC Simulation SolutionDocument2 pagesSQC Simulation Solutionmdasifkhan2013No ratings yet
- MM ZG611Document9 pagesMM ZG611mdasifkhan2013No ratings yet
- Academic Programs & PedagogyDocument1 pageAcademic Programs & Pedagogymdasifkhan2013No ratings yet
- PDFDocument15 pagesPDFkumarkk1969No ratings yet
- MM ZG523Document18 pagesMM ZG523mdasifkhan2013No ratings yet