You might also like
- Chap10 Phase Locked LoopsDocument26 pagesChap10 Phase Locked LoopsAlaa TobasiNo ratings yet
- PLL CircuitsDocument20 pagesPLL CircuitsNeeresh KumarNo ratings yet
- Lab TutorialDocument10 pagesLab TutorialMD JamalNo ratings yet
- Millimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationFrom EverandMillimicrosecond Pulse Techniques: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- L200 CDR I (2up)Document16 pagesL200 CDR I (2up)Nikunj JadawalaNo ratings yet
- Mixed Signal Lecture PLLDocument15 pagesMixed Signal Lecture PLLsheikhdanish17No ratings yet
- PLL Design ReportDocument30 pagesPLL Design Reporthasin986No ratings yet
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryFrom EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryNo ratings yet
- A Verilog-A Cycle-To-cycle Jitter Measurement ModulDocument4 pagesA Verilog-A Cycle-To-cycle Jitter Measurement ModulLi FeiNo ratings yet
- Thesis PLLDocument44 pagesThesis PLLrah0987No ratings yet
- FM - PM Demodulation - The Phase Lock LoopDocument5 pagesFM - PM Demodulation - The Phase Lock LoopSunit Kumar Sharma100% (1)
- PLL Phase Locked LoopDocument13 pagesPLL Phase Locked LoopK JahnaviNo ratings yet
- Signal Integrity in The Real WorldDocument52 pagesSignal Integrity in The Real WorldpatarinwNo ratings yet
- AN 01eDocument3 pagesAN 01eluisNo ratings yet
- FM Demodulation ExcllemtDocument61 pagesFM Demodulation Excllemtcutyverma100% (1)
- Phase Shifter TutorialDocument12 pagesPhase Shifter TutorialsukusportyNo ratings yet
- Different Types Hybrid Couplers Lumped DesignDocument10 pagesDifferent Types Hybrid Couplers Lumped Designsoumendubagchi100% (1)
- HFE0508 ChenakinDocument7 pagesHFE0508 ChenakinmarkessNo ratings yet
- Matlab 8Document12 pagesMatlab 8M Azeem100% (1)
- Phase Locked Loop DesignDocument13 pagesPhase Locked Loop DesignVIKALP KULSHRESTHANo ratings yet
- Chapter 7 Passive DevicesDocument72 pagesChapter 7 Passive DevicesNikunj ShahNo ratings yet
- Multiple Access TechniquesDocument35 pagesMultiple Access TechniquesPranav JadhavNo ratings yet
- Online Documentation For Altium Products - ( (High Speed Design in Altium Designer) ) - AD - 2018-10-26Document27 pagesOnline Documentation For Altium Products - ( (High Speed Design in Altium Designer) ) - AD - 2018-10-26Marco I100% (1)
- What Is Channel EstimationDocument15 pagesWhat Is Channel EstimationShubham GuptaNo ratings yet
- Phase Noise in OscillatorsDocument20 pagesPhase Noise in OscillatorsName100% (1)
- Microwave and Wireless SynthesizersDocument819 pagesMicrowave and Wireless SynthesizersvasikasNo ratings yet
- Phase Locked Loop (PLL) Vineet SahulaDocument53 pagesPhase Locked Loop (PLL) Vineet SahulaVSNo ratings yet
- Linear Technology-Understanding IP2 and IP3 Issues in Direct Conversion Receivers For WCDMA Wide Area BasestationsDocument5 pagesLinear Technology-Understanding IP2 and IP3 Issues in Direct Conversion Receivers For WCDMA Wide Area BasestationsMichael GrahamNo ratings yet
- Digital PLLDocument6 pagesDigital PLLPeter Podhoranský100% (1)
- Antenna RF Diplexer TutorialDocument3 pagesAntenna RF Diplexer Tutorialfiqur1No ratings yet
- OFDM Basics TutorialDocument3 pagesOFDM Basics Tutorialhisoni85No ratings yet
- Understanding Noise FigureDocument22 pagesUnderstanding Noise FigureNameNo ratings yet
- DSP-1 (Intro) (S)Document77 pagesDSP-1 (Intro) (S)karthik0433No ratings yet
- Architectures and RF System Design Issues For 3G Transceiver SystemsDocument26 pagesArchitectures and RF System Design Issues For 3G Transceiver SystemsWalid Ali-AhmadNo ratings yet
- PLL Algorithms PDFDocument7 pagesPLL Algorithms PDFJAYADHAR VEERISETTYNo ratings yet
- Vcos in Ads 699Document19 pagesVcos in Ads 699Amit JhaNo ratings yet
- Mixer 1Document59 pagesMixer 1bayman66No ratings yet
- Chapter 02 Basic Concepts in RF DesignDocument110 pagesChapter 02 Basic Concepts in RF DesignBilal HabibNo ratings yet
- Sensitivity or Selectivity - How Does ELNA Impact The Receriver PerformanceDocument15 pagesSensitivity or Selectivity - How Does ELNA Impact The Receriver PerformanceAdrian O Young100% (1)
- Phase Noise BasicsDocument14 pagesPhase Noise Basicskhanafzaal2576No ratings yet
- LC Voltage Control Oscillator AAC: A Stable Loss-Control Feedback Loop To Regulate The Oscillation Amplitude of LC VCO'sDocument28 pagesLC Voltage Control Oscillator AAC: A Stable Loss-Control Feedback Loop To Regulate The Oscillation Amplitude of LC VCO'sSreedevi MenonNo ratings yet
- An 1026Document6 pagesAn 1026kuazuNo ratings yet
- All Digital Phase Locked Loop Design and ImplementationDocument4 pagesAll Digital Phase Locked Loop Design and ImplementationAnton SaitovNo ratings yet
- Channel Estimation For Wireless OFDM SystemsDocument31 pagesChannel Estimation For Wireless OFDM SystemsvgguhaNo ratings yet
- Scfdma PDFDocument30 pagesScfdma PDFPankaj B MahajanNo ratings yet
- Radio PropagationDocument44 pagesRadio PropagationraedapuNo ratings yet
- Sampling and Baseband ModulationDocument65 pagesSampling and Baseband ModulationAbdul Qawi AnsariNo ratings yet
- Assignment 3Document1 pageAssignment 3Phani SingamaneniNo ratings yet
- Presentation On Digital Modulation and Forward Error CorrectionDocument74 pagesPresentation On Digital Modulation and Forward Error CorrectionJitendra ChuughNo ratings yet
- Chapter9 Phase-Locked LoopsDocument82 pagesChapter9 Phase-Locked LoopsNikunj ShahNo ratings yet
- Design Techniques For Low Noise Cmos Operational AmplifiersDocument4 pagesDesign Techniques For Low Noise Cmos Operational AmplifiersChandra Praveen MahalingamNo ratings yet
- HW4 Solution PDFDocument9 pagesHW4 Solution PDFMasud SarkerNo ratings yet
- Ffe Dfe ExcerptDocument14 pagesFfe Dfe ExcerptSaujal VaishnavNo ratings yet
- Electromagnetic WavesDocument5 pagesElectromagnetic WavesVishwanath BrungiNo ratings yet
- Rent 101 Nov2023Document1 pageRent 101 Nov2023jaberyemeniNo ratings yet
- How To Create Transport of Copies (Toc) in SapDocument7 pagesHow To Create Transport of Copies (Toc) in SapjaberyemeniNo ratings yet
- Check It Out For AS ABAP Performance IssuesDocument3 pagesCheck It Out For AS ABAP Performance IssuesjaberyemeniNo ratings yet
- Basis TcodesDocument4 pagesBasis TcodesjaberyemeniNo ratings yet
- SAP Client Copy / System Refresh: What Is System Refresh When and Why It Is Done?Document2 pagesSAP Client Copy / System Refresh: What Is System Refresh When and Why It Is Done?jaberyemeniNo ratings yet
- Ece Staff Meeting NoticeDocument1 pageEce Staff Meeting NoticejaberyemeniNo ratings yet
- 435faculty Complaints - ComplianceDocument1 page435faculty Complaints - CompliancejaberyemeniNo ratings yet
- Syllabus EEE 2019Document5 pagesSyllabus EEE 2019jaberyemeniNo ratings yet
- Syllabus For Written Test - Asst. Prof. in ECE-June-2019 Electronics and Communication Engineering PART - A (Common For All Candidates)Document3 pagesSyllabus For Written Test - Asst. Prof. in ECE-June-2019 Electronics and Communication Engineering PART - A (Common For All Candidates)jaberyemeniNo ratings yet
- 2b - E - Singular Plural-1Document3 pages2b - E - Singular Plural-1jaberyemeniNo ratings yet
- B.E. V-SEM (SEC-A) - E.C.E. Automatic Control Systems (PC 504 EC) Part-A Answer All The Questions (2 2 4)Document1 pageB.E. V-SEM (SEC-A) - E.C.E. Automatic Control Systems (PC 504 EC) Part-A Answer All The Questions (2 2 4)jaberyemeniNo ratings yet
- COURSE FILE 2015 - 2016: Faculty: Jabar Othman Subject: Ee Ii (Theory and Lab)Document1 pageCOURSE FILE 2015 - 2016: Faculty: Jabar Othman Subject: Ee Ii (Theory and Lab)jaberyemeniNo ratings yet
- MIT Impedence MatchDocument41 pagesMIT Impedence MatchjaberyemeniNo ratings yet
- Revised Be Library Books 2017Document4 pagesRevised Be Library Books 2017jaberyemeniNo ratings yet
- Mrs Amina 5957845 Orange Tours & TravelsDocument2 pagesMrs Amina 5957845 Orange Tours & TravelsjaberyemeniNo ratings yet
- Oman Teaching Opening DetailsDocument3 pagesOman Teaching Opening DetailsjaberyemeniNo ratings yet
- LRS PaymentDocument1 pageLRS PaymentjaberyemeniNo ratings yet
- Ee Ii Quiz 2015Document2 pagesEe Ii Quiz 2015jaberyemeniNo ratings yet
- 007 - Frq. Response - 320Hz - 4096 - CH1-3 - Graph7Document28 pages007 - Frq. Response - 320Hz - 4096 - CH1-3 - Graph7Debasmayee MohantyNo ratings yet
- CH-6a Noise Effect On AM SystemsDocument75 pagesCH-6a Noise Effect On AM SystemsRubina KhattakNo ratings yet
- Gain Staging With A VU Meter Cheat SheetDocument4 pagesGain Staging With A VU Meter Cheat Sheetchesososa28010% (1)
- Chapter 18 - Active FilterDocument42 pagesChapter 18 - Active FilterAbdirahman Elmi GurreNo ratings yet
- MP1570A/A1: SONET/SDH/PDH/ATM AnalyzerDocument8 pagesMP1570A/A1: SONET/SDH/PDH/ATM AnalyzerhernanespaNo ratings yet
- 212-GTR BOG-SH V30-CH-16 V3 MixDocument7 pages212-GTR BOG-SH V30-CH-16 V3 MixAndré LobregateNo ratings yet
- Performance Comparison of Wavelet Based and Conventional OFDM Systems - A ReviewDocument4 pagesPerformance Comparison of Wavelet Based and Conventional OFDM Systems - A ReviewkiaraNo ratings yet
- PAM With Natural SamplingDocument66 pagesPAM With Natural SamplingnctgayarangaNo ratings yet
- Lecture 1Document42 pagesLecture 1Nana Agyeman AntwiNo ratings yet
- AD7927Document28 pagesAD7927karoNo ratings yet
- What Is FMDocument9 pagesWhat Is FMJhasper ManagyoNo ratings yet
- Umts Uplink Load Parameter DefinitionDocument10 pagesUmts Uplink Load Parameter DefinitionJonathan Ruiz DakerNo ratings yet
- Wavelet & Fourier Analysis On The ENSO and Monsoon Data in PythonDocument10 pagesWavelet & Fourier Analysis On The ENSO and Monsoon Data in PythonTeto ScheduleNo ratings yet
- Digital Signal Processing (DSP) LAB Lab Report#05: SubjectDocument10 pagesDigital Signal Processing (DSP) LAB Lab Report#05: SubjectUprising RivalsNo ratings yet
- Butterfly Diagram - WikipediaDocument3 pagesButterfly Diagram - WikipediaHashimIdreesNo ratings yet
- Implementation of FIR Filters On FPGADocument73 pagesImplementation of FIR Filters On FPGAToanZ8No ratings yet
- Camera To Acquire Visual and Audio Alarm Verification Which Is Then Used in Tandem With The PIR Sensor To Provide Reliable Detection and False Alarm ImmunityDocument2 pagesCamera To Acquire Visual and Audio Alarm Verification Which Is Then Used in Tandem With The PIR Sensor To Provide Reliable Detection and False Alarm ImmunityAndre EinsteinNo ratings yet
- F3001 Service ManualDocument32 pagesF3001 Service ManualDaniel Almaguer VazquezNo ratings yet
- NR CurveDocument1 pageNR CurvePhúc Bùi VănNo ratings yet
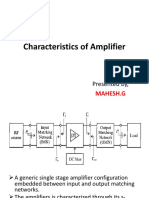
- Characteristics of AmplifierDocument10 pagesCharacteristics of Amplifierinformation and telecommunication engineeringNo ratings yet
- Bharat Vibha Jan Ke Gun Ah Ga ArDocument94 pagesBharat Vibha Jan Ke Gun Ah Ga ArUdit JainNo ratings yet
- Amplificador de Audio Digital Estéreomono Con Controlador de Auriculares y Salida de Línea de Subwoofer AD8258ADocument3 pagesAmplificador de Audio Digital Estéreomono Con Controlador de Auriculares y Salida de Línea de Subwoofer AD8258ATCL USERNo ratings yet
- KL650THX 635042118250460000Document1 pageKL650THX 635042118250460000Lê KiênNo ratings yet
- EE 424 #1: Sampling and ReconstructionDocument30 pagesEE 424 #1: Sampling and ReconstructionArunShanNo ratings yet
- Manual Rockford Fosgate Prime Rm1 Marine SubsDocument5 pagesManual Rockford Fosgate Prime Rm1 Marine SubsFernando MarquezNo ratings yet
- Errors in DFT ProcessingDocument20 pagesErrors in DFT Processinghamza abdo mohamoudNo ratings yet
- TSC 2002 Digital Image Processing: Introductory LectureDocument52 pagesTSC 2002 Digital Image Processing: Introductory LectureDr Raveendranathan K CNo ratings yet
- PTSP Notes Unit 5 PDFDocument7 pagesPTSP Notes Unit 5 PDFG S ArunNo ratings yet
- Dac Interface To 8051 PDFDocument4 pagesDac Interface To 8051 PDFRAVI100% (1)
- Brochure EvolutionDocument33 pagesBrochure EvolutionИван УзуновNo ratings yet
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900From EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900No ratings yet
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- Palo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsFrom EverandPalo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsNo ratings yet
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityFrom EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityRating: 5 out of 5 stars5/5 (2)
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- Azure Networking: Command Line Mastery From Beginner To ArchitectFrom EverandAzure Networking: Command Line Mastery From Beginner To ArchitectNo ratings yet
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringFrom EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringRating: 5 out of 5 stars5/5 (40)
- Terraform for Developers: Essentials of Infrastructure Automation and ProvisioningFrom EverandTerraform for Developers: Essentials of Infrastructure Automation and ProvisioningNo ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet