You might also like
- Spacecraft Dynamics and Control: The Embedded Model Control ApproachFrom EverandSpacecraft Dynamics and Control: The Embedded Model Control ApproachRating: 5 out of 5 stars5/5 (1)
- Cylinders of The PharaohDocument18 pagesCylinders of The PharaohiguandiánNo ratings yet
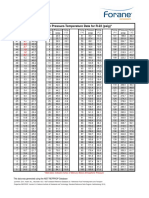
- Forane 22 Saturation Pressure Temperature DataDocument1 pageForane 22 Saturation Pressure Temperature Datavineeth100% (1)
- Margarine 12Document74 pagesMargarine 12the_gunners2004No ratings yet
- Crane State Space ModelDocument12 pagesCrane State Space ModelSarojakanti SahooNo ratings yet
- S Curve AlgorithDocument8 pagesS Curve AlgorithfmjmxNo ratings yet
- ISA Transactions Volume 53 Issue 3 2014 (Doi 10.1016/j.isatra.2014.01.004) Xiong, Jing-Jing Zheng, En-Hui - Position and Attitude Tracking Control For A Quadrotor UAVDocument7 pagesISA Transactions Volume 53 Issue 3 2014 (Doi 10.1016/j.isatra.2014.01.004) Xiong, Jing-Jing Zheng, En-Hui - Position and Attitude Tracking Control For A Quadrotor UAVMikoto RifkyNo ratings yet
- Theoretical and Experimental Investigation of Gain Scheduling and Adaptive Autopilots For A Model BoatDocument10 pagesTheoretical and Experimental Investigation of Gain Scheduling and Adaptive Autopilots For A Model BoatJuan Santiago Latigo ColliNo ratings yet
- Sliding-Mode Control For Trajectory-Tracking of A Wheeled Mobile Robot in Presence of UncertaintiesDocument6 pagesSliding-Mode Control For Trajectory-Tracking of A Wheeled Mobile Robot in Presence of UncertaintiesErik GutiérrezNo ratings yet
- 3 Nejad Et Al-LibreDocument10 pages3 Nejad Et Al-LibreEsthi KusumaNo ratings yet
- Collision Avoidance Control With SteeringDocument7 pagesCollision Avoidance Control With SteeringDavid MartínezNo ratings yet
- Camera ReadyDocument5 pagesCamera Readythuanhoang70No ratings yet
- Smooth Obstacle Avoidance Path Planning For Autonomous VehiclesDocument6 pagesSmooth Obstacle Avoidance Path Planning For Autonomous VehiclesRubénGómezGómezNo ratings yet
- Multi-Rate Path Following ControlDocument6 pagesMulti-Rate Path Following ControlBinhMinh NguyenNo ratings yet
- Annals 2013 4 01Document10 pagesAnnals 2013 4 01Febrian anggaNo ratings yet
- Optimal Design Methodology For An AGV Transportation System by Using The Queuing Network TheoryDocument10 pagesOptimal Design Methodology For An AGV Transportation System by Using The Queuing Network TheorybhumijayaNo ratings yet
- Model of Cellular AutomataDocument5 pagesModel of Cellular AutomatafitriarohimaatikaNo ratings yet
- Eru 2010 SLAM PaperDocument3 pagesEru 2010 SLAM PaperHasala DharmawardenaNo ratings yet
- Continuous Curvature Control of Mobile Robots WithDocument6 pagesContinuous Curvature Control of Mobile Robots WithPEDRO JESUS GONZALEZ TEBARNo ratings yet
- 2014InfSci Finite-Time Cascaded Tracking Control Approach For Mobile Robots - 2Document13 pages2014InfSci Finite-Time Cascaded Tracking Control Approach For Mobile Robots - 2aliNo ratings yet
- New Approaches For On-Line Tuning of The Linear Sliding Surface Slope in Sliding Mode ControllersDocument15 pagesNew Approaches For On-Line Tuning of The Linear Sliding Surface Slope in Sliding Mode ControllersenginyesilNo ratings yet
- Richter ISRR13Document16 pagesRichter ISRR13AmanNo ratings yet
- Train Run Curve Simulator (The 6th Asia-Pacific ITS Forum), 2003Document9 pagesTrain Run Curve Simulator (The 6th Asia-Pacific ITS Forum), 2003jcjong11No ratings yet
- On Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerDocument8 pagesOn Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerRaja ReddyNo ratings yet
- Mobile Robot Trajectory Tracking Using Model Predictive ControlDocument7 pagesMobile Robot Trajectory Tracking Using Model Predictive Controlloladas_rewNo ratings yet
- Microcontroller Based Model Design of A Train Collision Avoidance SystemDocument9 pagesMicrocontroller Based Model Design of A Train Collision Avoidance SystemIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Decentralized Robust Control For Multi-Vehicle NavigationDocument8 pagesDecentralized Robust Control For Multi-Vehicle NavigationZeeshan ShamsiNo ratings yet
- Rutiranje Vozila U SkladistimaDocument6 pagesRutiranje Vozila U SkladistimaJablan M KaraklajicNo ratings yet
- Control of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode ControlDocument6 pagesControl of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode Controlc0d3rNo ratings yet
- Richter 2016Document18 pagesRichter 2016Dedy BehiNo ratings yet
- Road Friction Coefficient PredictionDocument13 pagesRoad Friction Coefficient PredictionleullNo ratings yet
- Constant Kinetic Energy Robot Trajectory PlanningDocument16 pagesConstant Kinetic Energy Robot Trajectory PlanningstaktikaNo ratings yet
- Updated 1Document12 pagesUpdated 1MAAZ KHANNo ratings yet
- Road Accidents Forecasting Model Using Multi-Level Recursive MethodDocument7 pagesRoad Accidents Forecasting Model Using Multi-Level Recursive MethodAbhishek JainNo ratings yet
- A Nonlinear Approach For Re-Entry Guidance of Reusable Launch Vehicles Using Model Predictive Static ProgrammingDocument6 pagesA Nonlinear Approach For Re-Entry Guidance of Reusable Launch Vehicles Using Model Predictive Static ProgrammingOsman MohammedNo ratings yet
- Estimate Vehicle Speed from Traffic Count and Occupancy Data Using Bayesian ApproachDocument14 pagesEstimate Vehicle Speed from Traffic Count and Occupancy Data Using Bayesian ApproachEngr Muhammad SohailNo ratings yet
- Transportation and Traffic TheoryDocument21 pagesTransportation and Traffic TheorysaobracajniNo ratings yet
- Design and Analysis of Optimization Algorithms For Multi-Agent Railway Control SystemDocument9 pagesDesign and Analysis of Optimization Algorithms For Multi-Agent Railway Control SystemMinh Anh NguyenNo ratings yet
- Adaptive 2010 1 30 40029Document7 pagesAdaptive 2010 1 30 40029Pierre LeconNo ratings yet
- Robotic Wheelchair Control Considering User ComforDocument9 pagesRobotic Wheelchair Control Considering User ComforKaterineNo ratings yet
- 04 - Iet 2012Document13 pages04 - Iet 2012Lâm BảoNo ratings yet
- 1.Time-To-Contact Control For Safety and ReliabilityDocument4 pages1.Time-To-Contact Control For Safety and ReliabilityNARENDRA SAININo ratings yet
- Development of An Onboard Decision Support System For Ship Navigation Under Rough Weather ConditionsDocument8 pagesDevelopment of An Onboard Decision Support System For Ship Navigation Under Rough Weather ConditionsLP PereraNo ratings yet
- On Algorithms For Planning S-Curve Motion ProfilesDocument8 pagesOn Algorithms For Planning S-Curve Motion Profilessadiqaftab786No ratings yet
- Paper Journal PDFDocument19 pagesPaper Journal PDFThanh Phong PhamNo ratings yet
- 45 SignalStrategies (TRISTAN2007)Document7 pages45 SignalStrategies (TRISTAN2007)guido gentileNo ratings yet
- Fuzzy-Skyhook Control For Active Suspension SystemDocument12 pagesFuzzy-Skyhook Control For Active Suspension SystemPhan Ngoc DienNo ratings yet
- Tracking Oncoming and Turning Vehicles at Intersections: Alexander Barth and Uwe FrankeDocument8 pagesTracking Oncoming and Turning Vehicles at Intersections: Alexander Barth and Uwe Frankeshisasane2No ratings yet
- Analysis and Simulation of Traffic Flow: Temo BardzimashviliDocument11 pagesAnalysis and Simulation of Traffic Flow: Temo BardzimashvilijcrivasplataNo ratings yet
- A High Efficient System For Traffic Mean Speed Estimation From MPEG Video (10.1109@AICI.2009.358)Document5 pagesA High Efficient System For Traffic Mean Speed Estimation From MPEG Video (10.1109@AICI.2009.358)YoungKimNo ratings yet
- Fuzzy Supervisory Path Tracking of Mobile Robots 1Document7 pagesFuzzy Supervisory Path Tracking of Mobile Robots 1Thanh BaoNo ratings yet
- Adaptive Control of Mobile Manipulator To Track Horizontal Smooth Curved Apply For Welding ProcessDocument10 pagesAdaptive Control of Mobile Manipulator To Track Horizontal Smooth Curved Apply For Welding ProcessAJER JOURNALNo ratings yet
- Point-to-Point Trajectory Generation Under Joint Constraints For Industrial RobotsDocument9 pagesPoint-to-Point Trajectory Generation Under Joint Constraints For Industrial RobotsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Analyse of MEMS Based Inertial Sensors Parameters For Land Vehicle Navigation ApplicationDocument5 pagesAnalyse of MEMS Based Inertial Sensors Parameters For Land Vehicle Navigation ApplicationminhaaaNo ratings yet
- 96-Article Text-196-1-10-20201210 PDFDocument44 pages96-Article Text-196-1-10-20201210 PDFAman KatariaNo ratings yet
- Three-Dimensional Midcourse Guidance Using Neural Networks For Interception of Ballistic TargetsDocument11 pagesThree-Dimensional Midcourse Guidance Using Neural Networks For Interception of Ballistic TargetsGiri PrasadNo ratings yet
- Model-Based Condition Monitoring For Railway Vehicle SystemsDocument5 pagesModel-Based Condition Monitoring For Railway Vehicle SystemsDibakar MajeeNo ratings yet
- Intelligent Simulation of Multibody Dynamics: Space-State and Descriptor Methods in Sequential and Parallel Computing EnvironmentsDocument19 pagesIntelligent Simulation of Multibody Dynamics: Space-State and Descriptor Methods in Sequential and Parallel Computing EnvironmentsChernet TugeNo ratings yet
- Adaptive Terminal Sliding Mode Control For Rigid Robotic ManipulatorsDocument6 pagesAdaptive Terminal Sliding Mode Control For Rigid Robotic ManipulatorsRuben RaygosaNo ratings yet
- Mechatronics: Chih-Yang Chen, Tzuu-Hseng S. Li, Ying-Chieh Yeh, Cha-Cheng ChangDocument11 pagesMechatronics: Chih-Yang Chen, Tzuu-Hseng S. Li, Ying-Chieh Yeh, Cha-Cheng ChangЋирка ФејзбуџаркаNo ratings yet
- A New Method For Smooth Trajectory Planning of Robot ManipulatorsDocument17 pagesA New Method For Smooth Trajectory Planning of Robot Manipulatorswanglei2112221990No ratings yet
- Neues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficFrom EverandNeues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficNo ratings yet
- Algebraic Graph Theory and Cooperative Control ConsensusDocument11 pagesAlgebraic Graph Theory and Cooperative Control ConsensusOla SkeikNo ratings yet
- Population EstimationDocument6 pagesPopulation EstimationOla SkeikNo ratings yet
- Fuzzy Controller X: Instruction ManualDocument98 pagesFuzzy Controller X: Instruction ManualOla SkeikNo ratings yet
- Fuzzy ControlDocument41 pagesFuzzy ControlOla SkeikNo ratings yet
- Kalman DecompositionDocument13 pagesKalman DecompositionOla SkeikNo ratings yet
- Aliasing Task4Document6 pagesAliasing Task4Ola SkeikNo ratings yet
- Generilized Gap MetricDocument17 pagesGenerilized Gap MetricOla SkeikNo ratings yet
- Supervised LearningDocument1 pageSupervised LearningOla SkeikNo ratings yet
- Class22-Linear Regression LearningDocument20 pagesClass22-Linear Regression LearningOla SkeikNo ratings yet
- Chapter 6 LQ ControlDocument20 pagesChapter 6 LQ ControlOla SkeikNo ratings yet
- LinearizationDocument5 pagesLinearizationOla SkeikNo ratings yet
- Pspice Tutorial Stanford UniversityDocument4 pagesPspice Tutorial Stanford UniversitySaif AhmedNo ratings yet
- Application of Tomography Inversion Methods To Determine The Seismic Wave Velocity Structure (VP, VS, VPVS) of The MEQ Data On ALPHA Geothermal FielDocument5 pagesApplication of Tomography Inversion Methods To Determine The Seismic Wave Velocity Structure (VP, VS, VPVS) of The MEQ Data On ALPHA Geothermal FielWegiDwiSaptoNo ratings yet
- Test Planner-Repeater Course - 2023-2024 - (Phase-03)Document2 pagesTest Planner-Repeater Course - 2023-2024 - (Phase-03)SbjNo ratings yet
- Fyp Project For BrakesDocument28 pagesFyp Project For BrakesManojNo ratings yet
- Curtain Wall Calculation PDFDocument134 pagesCurtain Wall Calculation PDFAlaaBadwy100% (1)
- E024-01-0852-2017 Cat1Document7 pagesE024-01-0852-2017 Cat1churchill ochiengNo ratings yet
- Rebar Pullout Testing PDFDocument6 pagesRebar Pullout Testing PDFsami_bangash_1No ratings yet
- Problem Set - Fluid MechanicsDocument2 pagesProblem Set - Fluid MechanicsEloisa Mae FundarNo ratings yet
- Homework Helpers - Chemistry PDFDocument311 pagesHomework Helpers - Chemistry PDFTamby100% (1)
- Higher efficiency synchronous motors for industrial applicationsDocument6 pagesHigher efficiency synchronous motors for industrial applicationsAmirNo ratings yet
- Summary and Applications of The New Fatigue Rules in Part 14 of Api 579-1/ASME FFS-1 AND WRC 550Document11 pagesSummary and Applications of The New Fatigue Rules in Part 14 of Api 579-1/ASME FFS-1 AND WRC 550dddNo ratings yet
- Foundation Class X PCMBDocument1,571 pagesFoundation Class X PCMBJack CrookNo ratings yet
- Science and TechnologyDocument10 pagesScience and TechnologyentjinrNo ratings yet
- Electricity Class Notes Latest 21.10. 2019Document3 pagesElectricity Class Notes Latest 21.10. 2019bittuchintuNo ratings yet
- Project Avoidance MEMS Dielectric ChargeDocument17 pagesProject Avoidance MEMS Dielectric ChargeNguyễn Viết HuyNo ratings yet
- 3-7 Fluids in Rigid-Body Motion: - We ObtainedDocument6 pages3-7 Fluids in Rigid-Body Motion: - We ObtainedAsmaa Ali El-AwadyNo ratings yet
- Moment of Inertia of FlywheelDocument3 pagesMoment of Inertia of FlywheelFinney WilsonNo ratings yet
- SSP Tut and Ia QaDocument36 pagesSSP Tut and Ia QaHarsh MehtaNo ratings yet
- Science Lesson Plan: Rubrics On Assessing The Performance of Group ActivityDocument1 pageScience Lesson Plan: Rubrics On Assessing The Performance of Group ActivityRowena Sta MariaNo ratings yet
- Curl and DivergenceDocument5 pagesCurl and DivergenceChernet TugeNo ratings yet
- Inelastic Seismic Performance of RC Tall Piers With Hollow SectionDocument8 pagesInelastic Seismic Performance of RC Tall Piers With Hollow SectionMadhurimaMitraNo ratings yet
- An Introduction To DC Generator Using Matlab/Simulink: Debabrata PalDocument4 pagesAn Introduction To DC Generator Using Matlab/Simulink: Debabrata PalMohammad H Al-QaisiNo ratings yet
- At The Completion of The CourseDocument2 pagesAt The Completion of The Courseoday albuthbahakNo ratings yet
- Properties of Matter Test ReviewDocument9 pagesProperties of Matter Test ReviewAngel PeayNo ratings yet
- Design and Fabrication of Plastic Bottle and Can Crusher For Recycling PurposeDocument3 pagesDesign and Fabrication of Plastic Bottle and Can Crusher For Recycling PurposeInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- EarthingDocument8 pagesEarthingSatyender Kumar Jain100% (1)
- Applications Using The Partial Differential Equation ToolboxDocument11 pagesApplications Using The Partial Differential Equation ToolboxIgor WosniakNo ratings yet
- Becker 1987Document16 pagesBecker 1987Luis Fernando Vergaray AstupiñaNo ratings yet