IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE)
e-ISSN: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. III (Mar Apr. 2014), PP 47-55
www.iosrjournals.org
www.iosrjournals.org 47 | Page
Design and Development of Efficient Digital Filter Structures
using Xilinx System Generator
Suraj R. Gaikwad
1
, Gopal S. Gawande
2
1
(Department of Electronics and Telecommunication, S.S.G.M.C.E. Shegaon, India)
2
(Department of Electronics and Telecommunication, S.S.G.M.C.E. Shegaon, India)
Abstract: In this paper we propose the design and development of digital filters for audio application using
Xilinx System Generator. Digital Filters are important elements in Digital Signal Processing (DSP). In this
case, we can decimate the high frequency signal (128 KHz) upto respective low frequency signal (3.4 KHz).
Also we introduced some designs of digital filters using MATLAB Simulink model and Xilinx System Generator
and compare their respective results in case of computation and storage requirement. The proposed technique is
centered on the FIR filtering technique for decimation of audio signal.
Keywords: Digital Signal Processing, Digital filters, FIR filter, Matlab Simulink and Xilinx System Generator.
I. Introduction
In many practical application of digital signal processing, there is a problem of changing the sampling
rate of a signal, either increasing it or decreasing it by some amount. For example, in telecommunication system
that transmits and receives the different types of signals (e.g. fax, speech, video, etc), there is a requirement to
process the various signals at the different rates with corresponding bandwidth of the signals. The process of
converting a signal from a given rate to a different rate is called as sampling rate conversion and the systems
that employ multiple sampling rates in the processing of digital signals are called as multirate digital signal
processing system [9].
In signal processing, down sampling (or "sub sampling") is the process of reducing the sampling rate of
a signal [5]. This is usually done to reduce the data rate or the size of the data. The down sampling factor
(commonly denoted by M) is usually an integer or a rational fraction greater than unity. This factor multiplies
the sampling time or, equivalently, divides the sampling rate [6]. Since down sampling reduces the sampling
rate, it is usually a good idea to make sure the NyquistShannon sampling theorem criterion is maintained
relative to the new lower sample rate, to avoid aliasing in the resulting digital signal. To ensure that the
sampling theorem is satisfied, or approximately so, a low-pass filter is used as an anti-aliasing filter to reduce
the bandwidth of the signal before the signal is down sampled; the overall process (low-pass filter, then down
sample) is sometimes called decimation .
Digital filters are easily designed, tested and implemented on a general purpose computer or
workstation than the analog filters. The IIR filters are not well supported by softwares and Intellectuals property
cores as compared to the FIR filters [20].
In this paper, we discuss the implementation of FIR filters using MATLAB Simulink model and Xilinx
System Generator blocks.
II. Fir Filter
Finite Impulse Response (FIR) filter is a type of a signal processing filter whose impulse response (or
response to any finite length input) is of finite duration, because it settles to zero in finite time [14]. This is in
contrast to infinite impulse response (IIR) filters, which have internal feedback and may continue to respond
indefinitely (usually decaying). The impulse response of an Nth-order discrete-time FIR filter lasts for N+ 1
sample, and then dies to zero [20]. In this design a MAC (Multiplier Accumulator) based FIR filter has been
used.
There are many reasons why FIR filters are very attractive for digital filter design [20]. Some of them are:
Simple robust way of obtaining digital filters
Inherently stable when implemented non recursively
Free of limit cycles when implemented non recursively
Easy to attain linear phase
Simple extensions to multirate and adaptive filters
Design and Development of Efficient Digital Filter Structures using Xilinx System Generator
www.iosrjournals.org 48 | Page
Relatively straight-forward to obtain designs to match custom magnitude responses
Some vendors and specialized hardware only support FIR
Low sensitivity to quantization effects compared to many IIR filters
Fig.1: Basic FIR Filter Structures
III. Fir Lowpass Filters
Because the impulse response required to implement the ideal lowpass filter is infinitely long, it is
impossible to design an ideal FIR lowpass filter [17]. Finite length approximations to the ideal impulse response
lead to the presence of ripples in both the passband (w <wc) and the stopband (w >wc) of the filter, as well as to
a nonzero transition width between the passband and stopband of the filter (see Figure 3) where, wc = cutoff
frequency [20].
Fig.2: Illustration of the typical deviations from the ideal lowpass filter when approximating with an FIR filter,
wc = 0.4p.
IV. Matlab Simulink
Simulink is a software package for modeling, simulating, and analyzing dynamical systems including
in the MATLAB environment. It supports linear and nonlinear systems, modeled in continuous time, sampled
time, or a hybrid of the two Systems can also be multirate, i.e., have different parts that are sampled or updated
at different rates. Model analysis tools include linearization and trimming tools, which can be accessed from the
MATLAB command line, plus the many tools in MATLAB and its application toolboxes. And because
MATLAB and Simulink are integrated, we can simulate, analyze, and revise our models in either environment
at any point [19] and [20].
V. Xilinx System Generator
Xilinx produces many software tools to simplify the design task for hardware programmers. One such
program is DSP System Generator. It interfaces with Matlab Simulink and provide efficient implementations of
digitally realizable Simulink blocks and commonly used digital programming blocks. Another important feature
of System Generator is the Gateway In/out blocks. These provide the interface between the double precision of
Simulink with the floating point architecture of FPGA [2].
Design and Development of Efficient Digital Filter Structures using Xilinx System Generator
www.iosrjournals.org 49 | Page
VI. Block Modelling Of Fir Filter
a. Single Stage FIR Filter:
Fig.3: Block diagram of Single stage Decimation Filter
In this single stage FIR Filter model, input high frequency signal is 128 KHz and we have to decimate
it up to 3.4 KHz. Thus we use decimation factor is 32 i.e. (M = 32). The sampling rate of input signal is 256
KHz.
Fig.4: Simulink model of Single Stage FIR Filter
Filter Specifications Values
Sampling Frequency 256 KHz
Decimation factor 32
Passband Frequency 3.4 KHz
Stopband Frequency 4 KHz
Transition width 0.00234
Passband Attenuation 0.1 dB
Stopband Attenuation 40 dB
Order of Filter (N) 900
Table 1: Filter Specification of Single Stage FIR Filter
Fig.5: Frequency response of Single Stage FIR Filter
b. Two Stage FIR Filter
Fig.6: Block diagram of two stage Decimation Filter
In this two stage FIR Filter model, input high frequency signal is 128 KHz and we have to decimate it
up to 3.4 KHz. Thus we use two decimation factors are 16 and 2 i.e. (M1 = 16 and M2 = 2). Thus the total
decimation factor is 32. The sampling rate of input signal at first stage is 256 KHz and sampling rate of second
stage is 32 KHz.
Design and Development of Efficient Digital Filter Structures using Xilinx System Generator
www.iosrjournals.org 50 | Page
Fig.7: Simulink model of Two Stage FIR Filter
Filter Specifications Values
Sampling Frequency 256 KHz
Decimation factor 16
Passband Frequency 3.4 KHz
Stopband Frequency 12 KHz
Transition width 0.03359
Passband Attenuation 0.05 dB
Stopband Attenuation 40 dB
Order of Filter (N) 83
Table 2: Filter Specification of Two Stage FIR Filter (First Stage)
Fig.8: Frequency Response of First Stage of Two Stage FIR Filter
Filter Specifications Values
Sampling Frequency 256 KHz
Decimation factor 2
Passband Frequency 3.4 KHz
Stopband Frequency 8 KHz
Transition width 0.01796
Passband Attenuation 0.05 dB
Stopband Attenuation 40 dB
Order of Filter (N) 155
Table 3: Filter Specification of Two Stage FIR Filter (Second Stage)
Fig.9: Frequency response of second stage of Two Stage FIR Filter
Design and Development of Efficient Digital Filter Structures using Xilinx System Generator
www.iosrjournals.org 51 | Page
c. Three Stage FIR Filter
Fig.10: Block diagram of Three Stage Decimation Filter
In this three stage FIR Filter model, input high frequency signal is 128 KHz and we have to decimate it
up to 3.4 KHz. Thus we use three decimation factors are 8, 2 and 2 i.e. (M1 = 8, M2 = 2 and M3 = 2). Thus the
total decimation factor is 32. The sampling rate of input signal at first stage is 256 KHz and sampling rate of
second stage is 32 KHz and sampling rate of third stage is 16 KHz.
Fig.11: Simulink model of Three Stage FIR Filter
Filter Specifications Values
Sampling Frequency 256 KHz
Decimation factor 8
Passband Frequency 3.4 KHz
Stopband Frequency 28 KHz
Transition width 0.0960
Passband Attenuation 0.033 dB
Stopband Attenuation 40 dB
Order of Filter (N) 25
Table 4: Filter Specification of Three Stage FIR Filter (First Stage)
Fig.12: Frequency response of First stage of Three Stage FIR Filter
Filter Specifications Values
Sampling Frequency 256 KHz
Decimation factor 2
Passband Frequency 3.4 KHz
Stopband Frequency 12 KHz
Transition width 0.03359
Passband Attenuation 0.033 dB
Stopband Attenuation 40 dB
Order of Filter (N) 69
Table 5: Filter Specification of Three Stage FIR Filter (Second Stage)
Design and Development of Efficient Digital Filter Structures using Xilinx System Generator
www.iosrjournals.org 52 | Page
Fig.13: Frequency response of Second stage of Three Stage FIR Filter
Filter Specifications Values
Sampling Frequency 256 KHz
Decimation factor 2
Passband Frequency 3.4 KHz
Stopband Frequency 8 KHz
Transition width 0.0179
Passband Attenuation 0.033 dB
Stopband Attenuation 40 dB
Order of Filter (N) 136
Table 6: Filter Specification of Three Stage FIR Filter (Third Stage)
Fig.14: Frequency response of Third stage of Three Stage FIR Filter
d. Four Stage FIR Filter
Fig.15: Block diagram of Four Stage Decimation Filter
In this four stage FIR Filter model, input high frequency signal is 128 KHz and we have to decimate it
up to 3.4 KHz. Thus we use four decimation factors are 4, 2, 2 and 2 i.e. (M1 = 4, M2 = 2, M3 = 2 and M4 = 2).
Thus the total decimation factor is 32. The sampling rate of input signal at first stage is 256 KHz and sampling
rate of second stage is 64 KHz, sampling rate of third stage is 32 KHz, sampling rate of fourth stage is 16 KHz.
Fig.16: Simulink Model of Four Stage FIR Filter
Design and Development of Efficient Digital Filter Structures using Xilinx System Generator
www.iosrjournals.org 53 | Page
Filter Specifications Values
Sampling Frequency 256 KHz
Decimation factor 4
Passband Frequency 3.4 KHz
Stopband Frequency 60 KHz
Transition width 0.2210
Passband Attenuation 0.024 dB
Stopband Attenuation 40 dB
Order of Filter (N) 10
Table 7: Filter Specification of Four Stage FIR Filter (First Stage)
Fig.15: Frequency response of First stage of Four Stage FIR Filter
Filter Specifications Values
Sampling Frequency 256 KHz
Decimation factor 2
Passband Frequency 3.4 KHz
Stopband Frequency 28 KHz
Transition width 0.0960
Passband Attenuation 0.024 dB
Stopband Attenuation 40 dB
Order of Filter (N) 26
Table 8: Filter Specification of Four Stage FIR Filter (Second Stage)
Fig.16: Frequency response of Second stage of Four Stage FIR Filter
Filter Specifications Values
Sampling Frequency 256 KHz
Decimation factor 2
Passband Frequency 3.4 KHz
Stopband Frequency 12 KHz
Transition width 0.0335
Passband Attenuation 0.024 dB
Stopband Attenuation 40 dB
Order of Filter (N) 75
Table 9: Filter Specification of Four Stage FIR Filter (Third Stage)
Design and Development of Efficient Digital Filter Structures using Xilinx System Generator
www.iosrjournals.org 54 | Page
Fig.17: Frequency response of Third stage of Four Stage FIR Filter
Filter Specifications Values
Sampling Frequency 256 KHz
Decimation factor 2
Passband Frequency 3.4 KHz
Stopband Frequency 8 KHz
Transition width 0.0179
Passband Attenuation 0.024 dB
Stopband Attenuation 40 dB
Order of Filter (N) 140
Table 10: Filter Specification of Four Stage FIR Filter (Forth Stage)
Fig.18: Frequency response of Fourth stage of Four Stage FIR Filter
VII. Conclusion
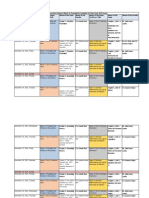
No. of
Stages
N1 N2 N3 N4 M1 M2 M3 M4 MPS TSR
1 900 - - - 32 - - - 28800 900
2 83 155 - - 16 2 - - 1638 238
3 25 69 136 - 8 2 2 - 610 230
4 10 26 75 140 4 2 2 2 522 251
It is clear that, in general, multirate designs yield very significance reductions in both computation and
storage requirements compared with single-stage designs. The reductions are due to the wide transitions of
filters at the early stages, leading to small values of N (filter coefficients).
In comparison of efficiencies of the multistage designs, it is found that the reduction in computation of
Multiplication per Second (MPS) and Total Storage Requirement (TSR) are greatest in going from one stage to
four stages. Overall, Three stages FIR filter is appeared the most efficient implementation.
Design and Development of Efficient Digital Filter Structures using Xilinx System Generator
www.iosrjournals.org 55 | Page
References
Journal Papers:
[1] L.C Loong and N.C Kyun, Design and Development of a Multirate Filters in Software Defined Radio Environment, International
Journal of Engineering and Technology, Vol. 5, No. 2, 2008.
[2] Prasit Kumar Bandyopadhyay and Arindam Biswas, FPGA Based High Frequency Noise Elimination System From Speech Signal
Using XILINX System Generator, Journal of Electron Devices, Vol. 17, 2013.
[3] Fredric J. Harris and Michael Rice, Multirate Digital Filters for Symbol Timing Synchronization in Software Defined Radios,
IEEE Journal vol. 19, no. 12, December 2001.
[4] Rajesh Mehra and Rashmi Arora, FPGA-Based Design of High-Speed CIC Decimator for Wireless Applications, International
Journal of Advanced Computer Science and Applications, Vol. 2, No. 5, 2011.
[5] Ljiljana Milic, Tapio Saramaki and Robert Bregovic, Multirate Filters: An Overview, IEEE Journal, 1-4244-0387, 2006.
[6] L. D. Milic and M.D. Lutovac, Design multirate filtering, Idea Group Publishing, pp. 105-142, 2002.
[8] V.Jayaprakasan and M.Madheswaran, Design of Efficient Polyphase Multistage FIR Filter with Memory Saving Structure for
Decimation, European Journal of Scientific Research, Vol. 93 No 2 December, 2012.
[9] Suraj R. Gaikwad and Gopal Gawande, Review: Design of Highly Efficient Multirate Digital Filters, Int. Journal of Engineering
Research and Application, ISSN : 2248-9622, Vol. 3, Issue 6, Nov-Dec 2013.
[10] Suvarna Joshi and Bharati Ainapure, FPGA Based FIR Filter, International Journal of Engineering Science and Technology, Vol.
2 (12), 2010.
[11] Rahul Sinha and Sonika, Design & Simulation of 128x Interpolator Filter, International Journal of Computer Engineering Science
(IJCES), ISSN : 2250:3439,Volume 2 Issue 10, October 2012.
[12] Fred harris, Multirate Signal Processing for Communication Systems, Upper Saddle River, New Jersey: Prentice Hall, 2004.
[13] R. A. Losada, Design finite impulse response digital filters. Part I, Microwaves & RF, vol. 43, pp. 6680, January 2004.
[14] M. Lutovac, D. Tosic, and B. Evans, Filter Design for Signal Processing Using MATLAB and Mathematica, Upper Saddle River,
New Jersey: Prentice Hall, 2001.
[15] M. Lang, Allpass filter design and applications, IEEE Transactions on Signal Processing, vol. 46, pp. 25052514, September
1998.
[16] R. Lyons, Interpolated narrowband lowpass FIR filters, IEEE Signal Proc. Mag., pp. 5057, January 2003.
Books:
[17] S.K. Mitra, Digital Signal Processing: A Computer based approach, The McGrow-Hill Companies, 2005.
[18] Ifeachor and Jervis, Digital Signal Processing, Prentice Hall.
[19] Monson H. Hayes, Statistical Signal Processing and Modeling, Jonh Wiley & Sons, Inc.
[20] Digital Filters with MATLAB, Ricardo A. Losada, The MathWorks, Inc. May 18, 2008
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- NVH PDFDocument3 pagesNVH PDFSubhendu BarisalNo ratings yet
- Internal Disease AnsDocument52 pagesInternal Disease AnsKumar AdityaNo ratings yet
- Plant Processes: Lesson 3Document3 pagesPlant Processes: Lesson 3Kayla Ta’jaeNo ratings yet
- Report Vortex TubeDocument68 pagesReport Vortex TubePravinSharmaNo ratings yet
- The Effect of Instructional Methods and Locus of Control On Students' Speaking Ability (An Experimental Study in State Senior High School 01, Cibinong Bogor, West Java)Document11 pagesThe Effect of Instructional Methods and Locus of Control On Students' Speaking Ability (An Experimental Study in State Senior High School 01, Cibinong Bogor, West Java)International Organization of Scientific Research (IOSR)No ratings yet
- Comparison of Psychological Variables Within Different Positions of Players of The State Junior Boys Ball Badminton Players of ManipurDocument4 pagesComparison of Psychological Variables Within Different Positions of Players of The State Junior Boys Ball Badminton Players of ManipurInternational Organization of Scientific Research (IOSR)No ratings yet
- Effects of Formative Assessment On Mathematics Test Anxiety and Performance of Senior Secondary School Students in Jos, NigeriaDocument10 pagesEffects of Formative Assessment On Mathematics Test Anxiety and Performance of Senior Secondary School Students in Jos, NigeriaInternational Organization of Scientific Research (IOSR)100% (1)
- Study The Changes in Al-Ahwaz Marshal Using Principal Component Analysis and Classification TechniqueDocument9 pagesStudy The Changes in Al-Ahwaz Marshal Using Principal Component Analysis and Classification TechniqueInternational Organization of Scientific Research (IOSR)No ratings yet
- Comparison of Explosive Strength Between Football and Volley Ball Players of Jamboni BlockDocument2 pagesComparison of Explosive Strength Between Football and Volley Ball Players of Jamboni BlockInternational Organization of Scientific Research (IOSR)No ratings yet
- Child Mortality Among Teenage Mothers in OJU MetropolisDocument6 pagesChild Mortality Among Teenage Mothers in OJU MetropolisInternational Organization of Scientific Research (IOSR)No ratings yet
- Project Based Learning Tools Development On Salt Hydrolysis Materials Through Scientific ApproachDocument5 pagesProject Based Learning Tools Development On Salt Hydrolysis Materials Through Scientific ApproachInternational Organization of Scientific Research (IOSR)No ratings yet
- Philosophical Analysis of The Theories of Punishment in The Context of Nigerian Educational SystemDocument6 pagesPhilosophical Analysis of The Theories of Punishment in The Context of Nigerian Educational SystemInternational Organization of Scientific Research (IOSR)No ratings yet
- Necessary Evils of Private Tuition: A Case StudyDocument6 pagesNecessary Evils of Private Tuition: A Case StudyInternational Organization of Scientific Research (IOSR)No ratings yet
- Development of Dacum As Identification Technique On Job Competence Based-Curriculum in High Vocational EducationDocument5 pagesDevelopment of Dacum As Identification Technique On Job Competence Based-Curriculum in High Vocational EducationInternational Organization of Scientific Research (IOSR)No ratings yet
- Enhancing Pupils' Knowledge of Mathematical Concepts Through Game and PoemDocument7 pagesEnhancing Pupils' Knowledge of Mathematical Concepts Through Game and PoemInternational Organization of Scientific Research (IOSR)No ratings yet
- Microencapsulation For Textile FinishingDocument4 pagesMicroencapsulation For Textile FinishingInternational Organization of Scientific Research (IOSR)No ratings yet
- Students' Perceptions of Grammar Teaching and Learning in English Language Classrooms in LibyaDocument6 pagesStudents' Perceptions of Grammar Teaching and Learning in English Language Classrooms in LibyaInternational Organization of Scientific Research (IOSR)No ratings yet
- Youth Entrepreneurship: Opportunities and Challenges in IndiaDocument5 pagesYouth Entrepreneurship: Opportunities and Challenges in IndiaInternational Organization of Scientific Research (IOSR)100% (1)
- Need of Non - Technical Content in Engineering EducationDocument3 pagesNeed of Non - Technical Content in Engineering EducationInternational Organization of Scientific Research (IOSR)No ratings yet
- Geohydrological Study of Weathered Basement Aquifers in Oban Massif and Environs Southeastern Nigeria: Using Remote Sensing and Geographic Information System TechniquesDocument14 pagesGeohydrological Study of Weathered Basement Aquifers in Oban Massif and Environs Southeastern Nigeria: Using Remote Sensing and Geographic Information System TechniquesInternational Organization of Scientific Research (IOSR)No ratings yet
- Lipoproteins and Lipid Peroxidation in Thyroid DisordersDocument6 pagesLipoproteins and Lipid Peroxidation in Thyroid DisordersInternational Organization of Scientific Research (IOSR)No ratings yet
- Comparison of Selected Anthropometric and Physical Fitness Variables Between Offencive and Defencive Players of Kho-KhoDocument2 pagesComparison of Selected Anthropometric and Physical Fitness Variables Between Offencive and Defencive Players of Kho-KhoInternational Organization of Scientific Research (IOSR)No ratings yet
- Auxin Induced Germination and Plantlet Regeneration Via Rhizome Section Culture in Spiranthes Sinensis (Pers.) Ames: A Vulnerable Medicinal Orchid of Kashmir HimalayaDocument4 pagesAuxin Induced Germination and Plantlet Regeneration Via Rhizome Section Culture in Spiranthes Sinensis (Pers.) Ames: A Vulnerable Medicinal Orchid of Kashmir HimalayaInternational Organization of Scientific Research (IOSR)No ratings yet
- Comparative Effect of Daily Administration of Allium Sativum and Allium Cepa Extracts On Alloxan Induced Diabetic RatsDocument6 pagesComparative Effect of Daily Administration of Allium Sativum and Allium Cepa Extracts On Alloxan Induced Diabetic RatsInternational Organization of Scientific Research (IOSR)No ratings yet
- Advancing Statistical Education Using Technology and Mobile DevicesDocument9 pagesAdvancing Statistical Education Using Technology and Mobile DevicesInternational Organization of Scientific Research (IOSR)No ratings yet
- Study of Effect of Rotor Speed, Combing-Roll Speed and Type of Recycled Waste On Rotor Yarn Quality Using Response Surface MethodologyDocument9 pagesStudy of Effect of Rotor Speed, Combing-Roll Speed and Type of Recycled Waste On Rotor Yarn Quality Using Response Surface MethodologyInternational Organization of Scientific Research (IOSR)No ratings yet
- Application of Xylanase Produced by Bacillus Megaterium in Saccharification, Juice Clarification and Oil Extraction From Jatropha Seed KernelDocument8 pagesApplication of Xylanase Produced by Bacillus Megaterium in Saccharification, Juice Clarification and Oil Extraction From Jatropha Seed KernelInternational Organization of Scientific Research (IOSR)No ratings yet
- Core Components of The Metabolic Syndrome in Nonalcohlic Fatty Liver DiseaseDocument5 pagesCore Components of The Metabolic Syndrome in Nonalcohlic Fatty Liver DiseaseInternational Organization of Scientific Research (IOSR)No ratings yet
- Investigation of Wear Loss in Aluminium Silicon Carbide Mica Hybrid Metal Matrix CompositeDocument5 pagesInvestigation of Wear Loss in Aluminium Silicon Carbide Mica Hybrid Metal Matrix CompositeInternational Organization of Scientific Research (IOSR)No ratings yet
- Factors Affecting Success of Construction ProjectDocument10 pagesFactors Affecting Success of Construction ProjectInternational Organization of Scientific Research (IOSR)No ratings yet
- A Review On Refrigerants, and Effects On Global Warming For Making Green EnvironmentDocument4 pagesA Review On Refrigerants, and Effects On Global Warming For Making Green EnvironmentInternational Organization of Scientific Research (IOSR)No ratings yet
- Research Analysis On Sustainability Opportunities and Challenges of Bio-Fuels Industry in IndiaDocument7 pagesResearch Analysis On Sustainability Opportunities and Challenges of Bio-Fuels Industry in IndiaInternational Organization of Scientific Research (IOSR)No ratings yet
- Parametric Optimization of Single Cylinder Diesel Engine For Specific Fuel Consumption Using Palm Seed Oil As A BlendDocument6 pagesParametric Optimization of Single Cylinder Diesel Engine For Specific Fuel Consumption Using Palm Seed Oil As A BlendInternational Organization of Scientific Research (IOSR)No ratings yet
- The Teacher and The LearnerDocument23 pagesThe Teacher and The LearnerUnique Alegarbes Labra-SajolNo ratings yet
- Optimize Supply Network DesignDocument39 pagesOptimize Supply Network DesignThức NguyễnNo ratings yet
- Good Evil EssayDocument2 pagesGood Evil EssayuniquebythemillionsNo ratings yet
- Atomic Structure - One Shot by Sakshi Mam #BounceBackDocument231 pagesAtomic Structure - One Shot by Sakshi Mam #BounceBackchansiray7870No ratings yet
- Thesis PromptsDocument7 pagesThesis Promptsauroratuckernewyork100% (2)
- Chapter 1-The Indian Contract Act, 1872, Unit 1-Nature of ContractsDocument10 pagesChapter 1-The Indian Contract Act, 1872, Unit 1-Nature of ContractsALANKRIT TRIPATHINo ratings yet
- The Role of Historical Cultural Memory in Uzbek Documentary CinemaDocument5 pagesThe Role of Historical Cultural Memory in Uzbek Documentary CinemaResearch ParkNo ratings yet
- Important instructions on judicial procedure from Narada SmritiDocument6 pagesImportant instructions on judicial procedure from Narada SmritirohitNo ratings yet
- Vedic Astrology OverviewDocument1 pageVedic Astrology Overviewhuman999100% (8)
- The Leaders of The NationDocument3 pagesThe Leaders of The NationMark Dave RodriguezNo ratings yet
- X TensoqaDocument2 pagesX TensoqaLeo CabelosNo ratings yet
- Master of Advanced Nursing Practice degreeDocument2 pagesMaster of Advanced Nursing Practice degreeAgusfian Trima PutraNo ratings yet
- Image Formation in Plane Mirrors: Ray DiagramsDocument3 pagesImage Formation in Plane Mirrors: Ray DiagramsSouvik BanerjeeNo ratings yet
- Diwali - An Overview of The Festival of LightsDocument3 pagesDiwali - An Overview of The Festival of LightsSumeetNo ratings yet
- ClarifierDocument2 pagesClarifierchagar_harshNo ratings yet
- Advancements in Organic Rankine Cycle System Optimisation For Combined Heat and Power Applications Components Sizing and Thermoeconomic ConsiderationsDocument14 pagesAdvancements in Organic Rankine Cycle System Optimisation For Combined Heat and Power Applications Components Sizing and Thermoeconomic ConsiderationsGuadalupe Abigail Rueda AguileraNo ratings yet
- The Issue of Body ShamingDocument4 pagesThe Issue of Body ShamingErleenNo ratings yet
- Tiger Tales: From Colonial MalayaDocument16 pagesTiger Tales: From Colonial MalayamatarsNo ratings yet
- BCMEDocument9 pagesBCMEVenkateshwaran VenkyNo ratings yet
- Caribbean Studies - Lesson 8 - Concept and Indicator of Development PDFDocument37 pagesCaribbean Studies - Lesson 8 - Concept and Indicator of Development PDFDarrion BruceNo ratings yet
- Course Introduction: Collection and Presentation of Data The Frequency Distribution Graphical Presentation of DataDocument61 pagesCourse Introduction: Collection and Presentation of Data The Frequency Distribution Graphical Presentation of DataShekinah Vingno LingcongNo ratings yet
- Day 2 TaskDocument4 pagesDay 2 TaskYaathriganNo ratings yet
- Slope Stability Analysis MethodsDocument5 pagesSlope Stability Analysis MethodsI am AngelllNo ratings yet
- 1-2-Chemical Indicator of GeopolymerDocument4 pages1-2-Chemical Indicator of GeopolymerYazmin Alejandra Holguin CardonaNo ratings yet
- Radial Drill Catalog-110620Document14 pagesRadial Drill Catalog-110620Anto SiminNo ratings yet
- Purnanandalahari p3D4Document60 pagesPurnanandalahari p3D4anilkumar100% (1)