You might also like
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- Submitted By-Ajendra Singh Mtech Ist YearDocument23 pagesSubmitted By-Ajendra Singh Mtech Ist YearaksasinghNo ratings yet
- DP Capability & Power Requirement M. Vuorre, Student Uis November 2010Document14 pagesDP Capability & Power Requirement M. Vuorre, Student Uis November 2010pavanipkNo ratings yet
- OMAE2008-57246 - Added Resistance of Moonpools in Calm Water PDFDocument10 pagesOMAE2008-57246 - Added Resistance of Moonpools in Calm Water PDFAnonymous JEe6LWPNo ratings yet
- Upgraded Design Basis for Offshore Free Fall Life BoatsDocument24 pagesUpgraded Design Basis for Offshore Free Fall Life BoatssulphideNo ratings yet
- A01 Catenary and Wave SystemsDocument14 pagesA01 Catenary and Wave SystemsNithin KannanNo ratings yet
- Design of A Truss SparDocument61 pagesDesign of A Truss SparEduardo SanchezNo ratings yet
- Maniobra de Remolque de BuquesDocument520 pagesManiobra de Remolque de Buquesvampiredraak2712No ratings yet
- MooringDocument151 pagesMooringHafizh AmazonNo ratings yet
- Rig ErikDocument8 pagesRig Eriksuraj pandeyNo ratings yet
- Hydromax ManualDocument252 pagesHydromax Manualmanon160100% (1)
- White Paper: Computer Simulation of Buoy Mooring SystemsDocument12 pagesWhite Paper: Computer Simulation of Buoy Mooring Systemssmithwork100% (1)
- Hydro Structure PapersDocument157 pagesHydro Structure PapersChen Chu-yunNo ratings yet
- Marine Personnel Transfer SafetyDocument74 pagesMarine Personnel Transfer SafetySew Chi Zhong100% (1)
- Effect of Pretension On Moored Ship RespDocument13 pagesEffect of Pretension On Moored Ship RespIvandito HerdayandityaNo ratings yet
- DNV Rules Planning Marine OperationsDocument150 pagesDNV Rules Planning Marine Operationsseaday1No ratings yet
- Case Studies For Evaluating Hydrodynamic Motion Responses Using MOSESDocument26 pagesCase Studies For Evaluating Hydrodynamic Motion Responses Using MOSESATLURI SATYA SRINIVAS oe13m002No ratings yet
- Installation of Steel and Flexible Pipelines in Sideway CurrentDocument144 pagesInstallation of Steel and Flexible Pipelines in Sideway CurrentJohari A. KasimNo ratings yet
- Jack-up Platform Dynamics StudyDocument128 pagesJack-up Platform Dynamics StudySubhra S Sanyal100% (1)
- Stability Committee Report on Capsizing ResearchDocument39 pagesStability Committee Report on Capsizing ResearchpawtarlayNo ratings yet
- Jack Up DesignDocument29 pagesJack Up DesignKirti BairathiNo ratings yet
- Nptel Syllabus EngineeringDocument2 pagesNptel Syllabus EngineeringUtkarshNo ratings yet
- Mooring Analysis of A Subsea Pipelay Barge: Kamal Singh Yadav, Savin Viswanathan, Arunprasath PDocument12 pagesMooring Analysis of A Subsea Pipelay Barge: Kamal Singh Yadav, Savin Viswanathan, Arunprasath PaaNo ratings yet
- Analysis of Ship Hull Girder VibrationDocument10 pagesAnalysis of Ship Hull Girder VibrationLucas Barrozo BrunNo ratings yet
- Assignment #3 Subsea Manifold and TemplatesDocument6 pagesAssignment #3 Subsea Manifold and TemplatesGerald SantosNo ratings yet
- J-Tube Pull-In Simulation SetupDocument4 pagesJ-Tube Pull-In Simulation SetupArie Indra MasudiNo ratings yet
- Steel Catenary RisersDocument29 pagesSteel Catenary RisersZadeh NormanNo ratings yet
- Towing Patterns Sample PCCDocument3 pagesTowing Patterns Sample PCCGerardo BosquezNo ratings yet
- Technical Paper - Modelling Suction Pile Lowering Through The SplashzoneDocument9 pagesTechnical Paper - Modelling Suction Pile Lowering Through The Splashzonecxb07164No ratings yet
- Vessel Motions and Mooring Line Tensions in Very Shallow WaterDocument91 pagesVessel Motions and Mooring Line Tensions in Very Shallow WaterPatrick SilvaNo ratings yet
- Simple Stability MosesDocument11 pagesSimple Stability Mosesikhwanul_muslimNo ratings yet
- Shell N2 CalculationDocument6 pagesShell N2 Calculationmacea1No ratings yet
- Tesis OffshoreDocument265 pagesTesis OffshoreRosalita Cordaro100% (1)
- Pull in AnalysisDocument4 pagesPull in Analysisgvsha88No ratings yet
- Chapter 5 - Seakeeping ModelsDocument44 pagesChapter 5 - Seakeeping ModelsSahil Jawa100% (1)
- OMAE2008-57082: A New Wind and Wave Atlas of The Hellenic SeasDocument9 pagesOMAE2008-57082: A New Wind and Wave Atlas of The Hellenic SeaspanNo ratings yet
- DX ConnectorDocument8 pagesDX ConnectorpooNo ratings yet
- PPL Shipyard in SingaporeDocument5 pagesPPL Shipyard in SingaporeIrfan SuhaimiNo ratings yet
- Overview of Jacket InstallationsDocument20 pagesOverview of Jacket Installationsbee4manu100% (1)
- Recent Developments of FAST For Modelling Offshore Wind TurbinesDocument11 pagesRecent Developments of FAST For Modelling Offshore Wind TurbinesJACKNo ratings yet
- (Mooring) : 1. GeneralDocument18 pages(Mooring) : 1. GeneralSushanta Kumar RoyNo ratings yet
- UMF GN04 Issue 1 Free Span AnalysisDocument5 pagesUMF GN04 Issue 1 Free Span AnalysiszulikramNo ratings yet
- Optimisaton of Static Characteristics of A Lazy Wave RizerDocument23 pagesOptimisaton of Static Characteristics of A Lazy Wave RizerAbiodunAremuOliyideNo ratings yet
- Damage Stability StandardsDocument10 pagesDamage Stability StandardsianNo ratings yet
- Ni 617 July 2014Document46 pagesNi 617 July 2014Nela TofanNo ratings yet
- Chapter 5 - Seakeeping TheoryDocument31 pagesChapter 5 - Seakeeping TheoryWilson Toncel ZuletaNo ratings yet
- FPSO Mooring SystemDocument11 pagesFPSO Mooring SystemsyamsulNo ratings yet
- Design Selection Analysis For Mooring Positioning System of Deepwater Semi-Submersible PlatformDocument8 pagesDesign Selection Analysis For Mooring Positioning System of Deepwater Semi-Submersible Platformpackya719150% (2)
- Analysis of offshore jacket platform responsesDocument8 pagesAnalysis of offshore jacket platform responsesrobert.johns1028No ratings yet
- IHC Engineering Business Ltd Company ProfileDocument35 pagesIHC Engineering Business Ltd Company ProfileSatyavan L RoundhalNo ratings yet
- Offshore Structures Installation MethodsDocument23 pagesOffshore Structures Installation Methods66apenlullenNo ratings yet
- OrcaFlex For PipelayDocument4 pagesOrcaFlex For PipelaySandeep RangapureNo ratings yet
- Risk Assessment of Aging Ship Hull Structures - FatigueDocument21 pagesRisk Assessment of Aging Ship Hull Structures - FatiguetrollgueleNo ratings yet
- OrcaFlex Dynamic Analysis Automation (DynaFlex Tutorial)Document19 pagesOrcaFlex Dynamic Analysis Automation (DynaFlex Tutorial)Abam Joshua100% (1)
- Riser Recoil Analysis Report For Acme DrillshipDocument21 pagesRiser Recoil Analysis Report For Acme DrillshipEdmo Das Virgens100% (1)
- OrcaFlex Demonstration IIT MadrasDocument11 pagesOrcaFlex Demonstration IIT MadrasvigambetkarNo ratings yet
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityFrom EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNo ratings yet
- c06 Calm BuoyDocument4 pagesc06 Calm BuoyHASHMI MAHMOODNo ratings yet
- Peer Reviewed VersionDocument12 pagesPeer Reviewed VersionOm Parkash SharmaNo ratings yet
- ManualDocument415 pagesManualJoakimNo ratings yet
- Vyzikasetal. 2014 OnthesimulationoffocusedwaveswithOpenFOAMwaves2Foam AnnotatedDocument10 pagesVyzikasetal. 2014 OnthesimulationoffocusedwaveswithOpenFOAMwaves2Foam AnnotatedputhenkulamNo ratings yet
- Aero Elastic Control FloaterDocument13 pagesAero Elastic Control FloaterputhenkulamNo ratings yet
- SubbuDocument7 pagesSubbuputhenkulamNo ratings yet
- Comparative Study On Braking Wave Forces On Vertical Walls With Cantilever SurfacesDocument7 pagesComparative Study On Braking Wave Forces On Vertical Walls With Cantilever Surfacessethhoffman85No ratings yet
- Ineteresting ArticleDocument12 pagesIneteresting ArticleputhenkulamNo ratings yet
- VanGent 1995 JWPCOE ASCE PorousFlowThroughRubbleMoundMaterialDocument7 pagesVanGent 1995 JWPCOE ASCE PorousFlowThroughRubbleMoundMaterialputhenkulamNo ratings yet
- OnfocussedwavesDocument99 pagesOnfocussedwavesputhenkulamNo ratings yet
- Wind-Wave Induced Dynamic Response - EffectiveRAODocument10 pagesWind-Wave Induced Dynamic Response - EffectiveRAOputhenkulamNo ratings yet
- Spar DocumentationDocument31 pagesSpar DocumentationputhenkulamNo ratings yet
- Grid 2 Grid ManualDocument55 pagesGrid 2 Grid ManualputhenkulamNo ratings yet
- Volume of Fluid (VOF) Method For The Dynamics of Free BoundariesDocument25 pagesVolume of Fluid (VOF) Method For The Dynamics of Free Boundariesmkm_350No ratings yet
- 2011 Influence of Heave Plate On Hydrodynamic Response of SparDocument11 pages2011 Influence of Heave Plate On Hydrodynamic Response of Sparshubham khodiyarNo ratings yet
- Khalid Muhammad NoumanDocument94 pagesKhalid Muhammad NoumanputhenkulamNo ratings yet
- VanGent 1995 JWPCOE ASCE PorousFlowThroughRubbleMoundMaterialDocument7 pagesVanGent 1995 JWPCOE ASCE PorousFlowThroughRubbleMoundMaterialputhenkulamNo ratings yet
- Icce2004 Irschik 02 PDFDocument13 pagesIcce2004 Irschik 02 PDFputhenkulamNo ratings yet
- Design of Offshore Structures - Force - Wave PDFDocument59 pagesDesign of Offshore Structures - Force - Wave PDFputhenkulamNo ratings yet
- Ocean Engineering: Sung-Jin Choi, Kwang-Ho Lee, Ove Tobias GudmestadDocument13 pagesOcean Engineering: Sung-Jin Choi, Kwang-Ho Lee, Ove Tobias GudmestadputhenkulamNo ratings yet
- Uncertainties and Scale Effects in Breaking Wave Loads On Marine Structures - Obhrai - UiS PDFDocument20 pagesUncertainties and Scale Effects in Breaking Wave Loads On Marine Structures - Obhrai - UiS PDFputhenkulamNo ratings yet
- ScaleDocument16 pagesScaleputhenkulamNo ratings yet
- CFDmodellingofwindflowaroundbuildingsforwindenergyconversion Page10 EECB 12Document11 pagesCFDmodellingofwindflowaroundbuildingsforwindenergyconversion Page10 EECB 12puthenkulamNo ratings yet
- Numerical Simulation of Liquids Draining From A TaDocument12 pagesNumerical Simulation of Liquids Draining From A TaputhenkulamNo ratings yet
- Jin Paper PDFDocument8 pagesJin Paper PDFputhenkulamNo ratings yet
- A Swirl Generator Case Study For OpenFOAMDocument10 pagesA Swirl Generator Case Study For OpenFOAMputhenkulamNo ratings yet
- A CFD Application of Newwave Theory To Wave-In-Deck SimulationDocument15 pagesA CFD Application of Newwave Theory To Wave-In-Deck SimulationputhenkulamNo ratings yet
- VukcevicEtAl GhostFluidMethodInPolyhedralFV AnnotatedDocument19 pagesVukcevicEtAl GhostFluidMethodInPolyhedralFV AnnotatedputhenkulamNo ratings yet
- Goda RandomwavebreakingDocument12 pagesGoda RandomwavebreakingputhenkulamNo ratings yet
- Numerical Simulation of Deterministic Freak Wave Sequences and Wave-Structure InteractionDocument17 pagesNumerical Simulation of Deterministic Freak Wave Sequences and Wave-Structure InteractionputhenkulamNo ratings yet
- DAT 510: Assignment 1: Submission Deadline: 08:00 Am, Wednesday, Sept. 21, 2016Document6 pagesDAT 510: Assignment 1: Submission Deadline: 08:00 Am, Wednesday, Sept. 21, 2016puthenkulam0% (1)
- HRPP488-Breaking Wave Loads at Vertical SeawallsDocument32 pagesHRPP488-Breaking Wave Loads at Vertical SeawallsputhenkulamNo ratings yet
- 1370Document6 pages1370Muhammad IshfaqNo ratings yet
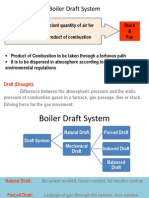
- Boiler Draft SystemDocument56 pagesBoiler Draft SystemAmit Chauhan78% (9)
- Experiment No: - Aim: Study of Different Switches. TheoryDocument5 pagesExperiment No: - Aim: Study of Different Switches. TheoryAnonymous kT0ONWNo ratings yet
- Linde DriveSystems AM PDFDocument37 pagesLinde DriveSystems AM PDFrockrapdudeNo ratings yet
- Design and Stress Analysis of Extraterrestrial Electric Rocket EnginesDocument671 pagesDesign and Stress Analysis of Extraterrestrial Electric Rocket EnginesJohn GreenewaldNo ratings yet
- Im Opm 300en-GB07 1Document93 pagesIm Opm 300en-GB07 1Сергій БоженкоNo ratings yet
- Premier Series Piston Pumps Technical SpecificationsDocument40 pagesPremier Series Piston Pumps Technical SpecificationsDamNo ratings yet
- Calculating Permeate Flux, Membrane Resistance and Their Relationship to PressureDocument2 pagesCalculating Permeate Flux, Membrane Resistance and Their Relationship to PressureMubarak YakzanNo ratings yet
- CDS VAM TOP ® 4.5in. 12.6lb-ft L80 13CR API Drift 3.833in.Document1 pageCDS VAM TOP ® 4.5in. 12.6lb-ft L80 13CR API Drift 3.833in.ThierryNo ratings yet
- Modelling and Fatigue Analysis of Metal Matrix Composite Camshaft Using Finite Element AnalysisDocument5 pagesModelling and Fatigue Analysis of Metal Matrix Composite Camshaft Using Finite Element Analysissuraj dhulannavar0% (1)
- Electric Diagram MLT 845 - 120 LSU (Manitou)Document12 pagesElectric Diagram MLT 845 - 120 LSU (Manitou)Rudy HermawanNo ratings yet
- Structural Engineering FormulasDocument120 pagesStructural Engineering FormulasAnonymous PjmE9RJcgh100% (2)
- SP SP: It en Es FRDocument44 pagesSP SP: It en Es FRGerald Leon Flores100% (1)
- Tower SolutionsDocument50 pagesTower Solutionssaravanan4286100% (1)
- Boite VolvoDocument61 pagesBoite VolvoAbdelkader GouddiNo ratings yet
- Problem No. 2-2 (Compression)Document3 pagesProblem No. 2-2 (Compression)Jhun Michael LocusNo ratings yet
- V100 Volumetric Cold Water Meters: The Kent Range of Domestic MetersDocument4 pagesV100 Volumetric Cold Water Meters: The Kent Range of Domestic MetersMohammad ZeeshanNo ratings yet
- Engine Controls Hybrid System Circuit D2Document1 pageEngine Controls Hybrid System Circuit D2FranciscoNo ratings yet
- 11TB18161361 enDocument219 pages11TB18161361 endhmartiniNo ratings yet
- Mixing and AgitationDocument17 pagesMixing and AgitationTa Den April88% (8)
- Prediction of Thrust Force and Torque in Drilling On Aluminium AlloyDocument7 pagesPrediction of Thrust Force and Torque in Drilling On Aluminium Alloyanilsamuel0077418No ratings yet
- Volvo CamshaftsDocument1 pageVolvo CamshaftsMilos ProticNo ratings yet
- Catalogo 12 FisherDocument286 pagesCatalogo 12 FisherJohn Fredy Rozo ArevaloNo ratings yet
- Comparisonofweldingeconomy Kehlnaht 12551752Document10 pagesComparisonofweldingeconomy Kehlnaht 12551752Asebaho BadrNo ratings yet
- RT760E Load ChartDocument19 pagesRT760E Load Chartcz7ykktc5bNo ratings yet
- Bobcat 742b y 743bDocument271 pagesBobcat 742b y 743bGustavo100% (5)
- Cyclone SeparatorDocument8 pagesCyclone SeparatorRizwan FaridNo ratings yet
- Mercruiser Tune Up KitDocument31 pagesMercruiser Tune Up KitMarine Parts ChinaNo ratings yet
- Technical Data Sheet for Adsorption Dryer HREDocument3 pagesTechnical Data Sheet for Adsorption Dryer HREVladimir KirovNo ratings yet
- Caterpillar 3412 Marine Engine Details, Specs, Features & ExtrasDocument5 pagesCaterpillar 3412 Marine Engine Details, Specs, Features & ExtrasTobias BengtsenNo ratings yet