You might also like
- How To Use GitDocument14 pagesHow To Use GitLoris FranchiNo ratings yet
- Concurrent Engineering Aplied To Space Mission Assessment and DesignDocument7 pagesConcurrent Engineering Aplied To Space Mission Assessment and DesignLoris FranchiNo ratings yet
- Link Budget For NTNU Test SatelliteDocument119 pagesLink Budget For NTNU Test Satellitemegustalazorra100% (1)
- 089 OzanaDocument22 pages089 OzanaFelipe Ruben AlejoNo ratings yet
- Adaptive ControlDocument6 pagesAdaptive ControlLoris FranchiNo ratings yet
- SAIC PresentationDocument17 pagesSAIC PresentationLoris FranchiNo ratings yet
- Biomimetic Design of An Under-Actuated Leg Exoskeleton For Load-Carrying AugmentationDocument97 pagesBiomimetic Design of An Under-Actuated Leg Exoskeleton For Load-Carrying AugmentationVed Prakash ChoudharyNo ratings yet
- Control Design LVDocument11 pagesControl Design LVRajib PalNo ratings yet
- Lec 2 - Neural Network Perceptron Adaline PDFDocument7 pagesLec 2 - Neural Network Perceptron Adaline PDFLoris FranchiNo ratings yet
- Tabella IntegraliDocument2 pagesTabella IntegraliLoris FranchiNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Medication - Safety - v4 Last Update 2015Document81 pagesMedication - Safety - v4 Last Update 2015Retno PalupiNo ratings yet
- English Test 6Document87 pagesEnglish Test 6Ha PhanNo ratings yet
- Lab Journal 4 14032023 104921amDocument8 pagesLab Journal 4 14032023 104921amHammad MashwaniNo ratings yet
- Unit explores Christian morality and conscienceDocument1 pageUnit explores Christian morality and conscienceRose Angela Mislang Uligan100% (1)
- FHM Espana 2010 12 PDFDocument2 pagesFHM Espana 2010 12 PDFBrandenNo ratings yet
- Inakyd 3623-X-70Document2 pagesInakyd 3623-X-70roybombomNo ratings yet
- Procedure - AC Circuits and Signal Modulation - W20Document6 pagesProcedure - AC Circuits and Signal Modulation - W20ChocoNo ratings yet
- Carta Psicrometrica PDFDocument2 pagesCarta Psicrometrica PDFJuliethNo ratings yet
- Mar For M: I MMQ SeriesDocument28 pagesMar For M: I MMQ SeriesIpal Febri NartaNo ratings yet
- Nitration of Methyl BenzoateDocument3 pagesNitration of Methyl BenzoateDaniel McDermottNo ratings yet
- Parameters Governing Predicted and Actual RQD Estimation - FINAL - PUBLISHED - VERSIONDocument14 pagesParameters Governing Predicted and Actual RQD Estimation - FINAL - PUBLISHED - VERSIONKristian Murfitt100% (1)
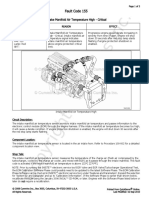
- Fault Code 155: Intake Manifold Air Temperature High - CriticalDocument3 pagesFault Code 155: Intake Manifold Air Temperature High - Criticalhamilton miranda100% (1)
- Earthbag House For HaitiDocument22 pagesEarthbag House For HaitiRaymond KatabaziNo ratings yet
- Tiger 690 Conversion PDFDocument8 pagesTiger 690 Conversion PDFGerardo Esteban Lagos RojasNo ratings yet
- SAFETY AND LOSS PREVENTION FOR CHEMICAL PROCESS FACILITIESDocument13 pagesSAFETY AND LOSS PREVENTION FOR CHEMICAL PROCESS FACILITIESKinosraj KumaranNo ratings yet
- Demo DLLDocument2 pagesDemo DLLArlene Diokno100% (1)
- 3.1-T.C.Dies PDFDocument6 pages3.1-T.C.Dies PDFYahyaMoummouNo ratings yet
- Kirloskar-Oil-Engines DescriptionsDocument8 pagesKirloskar-Oil-Engines Descriptionssinghhardeep760No ratings yet
- ASIAN LIVESTOCK PERSPECTIVESDocument18 pagesASIAN LIVESTOCK PERSPECTIVESMuadz AbdurrahmanNo ratings yet
- Secretary Birds: Fascinating Hunters of the African SavannahDocument32 pagesSecretary Birds: Fascinating Hunters of the African Savannahpwint phyu kyawNo ratings yet
- Modeling Vessel Impacts for Lock Wall DesignDocument15 pagesModeling Vessel Impacts for Lock Wall DesignSalam FaithNo ratings yet
- Collab#2 (Edited)Document14 pagesCollab#2 (Edited)Yani BatoctoyNo ratings yet
- South African Flora GlossaryDocument47 pagesSouth African Flora Glossarymr.bryceNo ratings yet
- Variants of NormalDocument9 pagesVariants of NormalFaizah HannyNo ratings yet
- Type 2 Diabetes MellitusDocument6 pagesType 2 Diabetes MellitusJoy NisoladaNo ratings yet
- JMJ Marist Brothers Notre Dame of Marbel University Integrated Basic Education Department City of Koronadal, South CotabatoDocument13 pagesJMJ Marist Brothers Notre Dame of Marbel University Integrated Basic Education Department City of Koronadal, South CotabatoNestor Gerotape DiosanaNo ratings yet
- ###Questions Model PDFDocument2 pages###Questions Model PDFDave DMNo ratings yet
- 2nd - Science-Second-Quarter-Week-1Document37 pages2nd - Science-Second-Quarter-Week-1Arlene AranzasoNo ratings yet
- Astrological Terms A-ZDocument63 pagesAstrological Terms A-Zmahadp08100% (1)
- PRN Maths Midterm QP Aug 18Document3 pagesPRN Maths Midterm QP Aug 18JanakChandPNo ratings yet