Professional Documents
Culture Documents
Artigo Inversor Freq
Uploaded by
Gabriel G. SilvaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Artigo Inversor Freq
Uploaded by
Gabriel G. SilvaCopyright:
Available Formats
Inversor de Freqncia Microcontrolado | 2010
INVERSOR DE FREQNCIA MICROCONTROLADO
LUIS FERNANDO PAVINI, MARCIO RIBEIRO DE SOUZA, RUBENS MORAES FILHO, TACIO LUIZ DE
SOUZA BARBEIRO
Engenharia Eltrica Habilitao Eletrnica, Centro Universitrio de Rio Preto UNIRP
E-mails: aaaa_aaaaaa@hotmail.com, bbb.bbbbbbbbbbbb@gmail.com, ccc.cccccccccccc@gmail.com,
ddddd@unirpnet.com.br
Resumo Com o crescente uso de motores de corrente alternada(CA) devido a necessidade de automatizao de processos
industriais, o inversor de freqncia ganhou destaque neste cenrio. Desta forma, este trabalho tem por objetivo projetar e
simular um inversor de freqncia alimentado pela rede eltrica monofsica convencional, tendo como sada uma tenso
trifsica, para alimentar e controlar a velocidade de rotao de motores CA. O controle feito atravs do chaveamento de
transistores, comandados por um microcontrolador. A velocidade variada pela alterao da freqncia da tenso na sada do
inversor. Um controle de amplitude da tenso realizado na entrada, atravs da tcnica PWM(Modulao por Largura de
Pulso), possibilitando o controle escalar do processo, mantendo a razo V/F(tenso/freqncia) constante, garantindo que o
torque do motor no varie. Alm do processo terico, so mostradas as etapas de uma simulao por software em forma de
resultado, e estes so discutidos e analisados, comprovando a eficcia do projeto.
Palavras-chave motor trifsico, inversor de freqncia, microcontrolador, PIC, chaveamento 6 pulsos, PWM.
1 Introduo
Motores eltricos trifsicos de corrente alternada (CA) so amplamente utilizados em processos industriais no
mundo inteiro. Em muitos casos, a utilizao desses motores requer o total controle da sua velocidade de rotao, de
forma a otimizar o desempenho ou at mesmo tornar possvel a realizao de determinado processo. Com a evoluo da
eletrnica de potncia, muitos equipamentos eletrnicos esto hoje disponveis no mercado para a realizao desta
tarefa. Dentre eles, se destaca o Inversor de Freqncia, por ser mais eficiente e robusto para este fim.
Inversores de freqncia so equipamentos capazes de permitir o controle da freqncia da tenso que
aplicada ao motor CA, possibilitando desta forma, o controle da sua velocidade de rotao. O que o inversor faz ,
basicamente, converter a tenso monofsica da rede eltrica convencional (tambm h inversores com entrada bifsica e
trifsica) em uma tenso contnua(CC) e, posteriormente, converter esta tenso contnua em uma nova tenso alternada
de freqncia ajustvel.
Para esta converso tornar-se possvel, utiliza-se o chaveamento de semicondutores (transistores e/ou
tiristores). Os principais mtodos de chaveamento so o modo 6 pulsos e o PWM. Dentre os semicondutores
disponveis no mercado atualmente para este fim, destaca-se o transistor IGBT (Insulated Gate Bipolar Transistor
Transistor Bipolar de Porta Isolada). Este tipo de transistor capaz de trabalhar em altas freqncias de chaveamento.
Para comandar o processo de chaveamento, temos os microcontroladores e os microprocessadores, que so
componentes capazes de permitir que se controle um processo eletrnico, utilizando-se para isso uma lgica de
controle.
Este trabalho tem por objetivo projetar e simular em software um inversor de freqncia para motores CA
trifsicos para aplicaes simples, utilizando transistores como elementos chaveados, um microcontrolador como
elemento de controle e o mtodo de chaveamento 6 pulsos 3 a 3(ser explicado mais adiante). A freqncia da tenso na
sada dever variar entre 2Hz a 100Hz. A figura 1 mostra um diagrama simplificado de um inversor de freqncia.
Rede eltrica
60Hz
Circuito Retificador
e Filtro
Controle de Amplitude
(Chopper - PWM)
Microcontrolador
(Controle Lgico)
Interface
Homem - Mquina
(IHM)
Circuito de Chaveamento
(6 pulsos 3 a 3)
Motor trifsico CA
Figura 1. Diagrama simplificado de um inversor de freqncia
UNIRP Centro Universitrio de Rio Preto
Inversor de Freqncia Microcontrolado | 2010
O inversor proposto baseia-se no mesmo princpio da figura anterior, onde a entrada da rede eltrica ser
monofsica(127V/60Hz) e a sada ser convertida em trifsica, e um controle de torque do motor ser efetuado atravs
da razo V/F(tenso/freqncia). O controle da amplitude da tenso ser realizado pelo chaveamento(PWM) de um
transistor antes da etapa de chaveamento 6 pulsos, de forma que esta amplitude se relacione com a freqncia, tornando
V/F constante.
Alm de alterar a freqncia, tambm ser possvel configurar um tempo para acelerar e desacelerar o motor,
assim como alterar o sentido de rotao deste. O tempo de acelerao/desacelerao poder variar de 1 a 5 segundos.
Todos esses parmetros sero configurados atravs de botes de controle e todo o processo ser mostrado na tela de um
display de LCD.
2 Fundamentao e Projeto
2.1 Motores Trifsicos CA
Um motor eltrico uma mquina capaz de converter energia eltrica em energia mecnica(movimento
giratrio).
O motor mais utilizado atualmente o motor de induo CA (figura 5). Um motor de induo composto
basicamente de duas partes: estator e rotor. O espao entre o estator e o rotor denominado entre-ferro. O estator
constitui a parte esttica e o rotor a parte mvel. O estator composto de chapas finas de ao magntico tratadas
termicamente para reduzir ao mnimo as perdas por correntes parasitas e histerese. Estas chapas tem o formato de um
anel com ranhuras internas (vista frontal) de tal maneira que possam ser alojados enrolamentos, os quais por sua vez,
quando em operao, devero criar um campo magntico no estator. Existem dois tipos de motores de induo em
relao ao tipo de rotor:
Motor de induo gaiola de esquilo: no qual o rotor composto de barras de material condutor que se
localizam em volta do conjunto de chapas do rotor, curto-circuitadas por anis metlicos nas extremidades.
Motor de induo com rotor bobinado: no qual o rotor composto de um enrolamento distribudo em torno do
conjunto de chapas de material magntico.
A aplicao de tenso alternada nos enrolamentos do estator, ir produzir neste um campo magntico variante
no tempo. O fluxo magntico girante no estator atravessar o entreferro e, por ser variante no tempo, induzir tenso
alternada no enrolamento trifsico do rotor. Como os enrolamentos do rotor esto curto-circuitados, essa tenso
induzida far com que circule uma corrente pelo enrolamento do rotor, que por conseqncia, ir produzir um fluxo
magntico que tentar se alinhar com o campo magntico girante do estator.
Uma vez que o campo magntico produzido no estator varia de acordo com a freqncia da tenso aplicada,
pode-se ento variar a velocidade de rotao do motor.
N=
120 f
p
(1)
N velocidade do campo girante (rpm)
f freqncia da rede em (Hz)
p nmero de plos do motor
Como o torque (2) do motor deve se manter constante, ao variar a freqncia, deve ser alterada tambm a
tenso aplicada, mantendo a relao V/F (tenso/freqncia) constante, evitando assim que o torque varie. Dessa forma,
o fluxo magntico (3) tambm se manter constante, evitando danos ao material magntico do estator e do rotor.
T I2
V
f
T torque (N.m)
F fluxo magntico (weber/m)
I2 corrente rotrica (A)
UNIRP Centro Universitrio de Rio Preto
(2)
(3)
Inversor de Freqncia Microcontrolado | 2010
A figura 2 mostra as caractersticas do torque quando se varia a tenso do estator sem variar a freqncia.
Pode-se verificar mnimas variaes de velocidade para uma mesma situao de carga. A figura 3 mostra uma variao
da freqncia sem variar a tenso. Observa-se uma variao de velocidade mais eficiente, porm, o torque reduzido
com o acrscimo da freqncia. A figura 4 mostra um controle escalar V/F, onde o torque permanece constante para
todas as situaes, e o controle de velocidade se mostra eficiente.
Figura 2. Variao da tenso do estator com freqncia fixa
Figura 3. Variao da freqncia com tenso do estator fixa
Figura 4. Controle escalar V/F constante
UNIRP Centro Universitrio de Rio Preto
Inversor de Freqncia Microcontrolado | 2010
Figura 5. Partes construtivas de um motor CA trifsico
Uma corrente circular pelo enrolamento do estator e pela rede eltrica. A corrente que circular ser a corrente
nominal do motor caso esteja a plena carga. A corrente nominal calculada com base na potncia nominal do motor(CV
ou HP) e na tenso aplicada s fases(motor trifsico). A equao abaixo demonstra esse clculo para a potncia em
CV(cavalos):
In =
In
Pcv
Vl
fp
n
Pcv 736
Vl 3 fp n
(4)
corrente nominal
potncia em CV(cavalos)
tenso de linha
fator de potncia
rendimento do motor
Durante a partida do motor, a corrente pode chegar a um valor de 6 a 8 vezes o valor da corrente nominal. Isto
ocorre devido ao momento de inrcia e ao escorregamento(s) do rotor em relao ao campo girante do estator. O rotor
sempre gira com uma velocidade menor do que o campo do estator, e a esta diferena de velocidade, d-se o nome de
escorregamento. Quando o rotor est parado e o motor acionado, o escorregamento mximo, e o rotor tentar se
alinhar com a velocidade de rotao do campo do estator, produzindo uma alta corrente de partida.
A figura 6 mostra um circuito equivalente para um motor de induo, onde R1 representa a resistncia do
estator e X1 a indutncia. R2 e X2 representam a resistncia e a indutncia do rotor, e XM representa a reatncia de
magnetizao.
Figura 6. Circuito equivalente do motor de induo
UNIRP Centro Universitrio de Rio Preto
Inversor de Freqncia Microcontrolado | 2010
De uma forma geral, a equao (5) mostra a corrente no estator para uma determinada tenso aplicada em
funo da impedncia equivalente do motor. Portanto, podemos verificar que, quanto menor for a tenso aplicada ao
estator, menor ser a corrente que circular pelo circuito.
I1
V1
Z eq
(5)
I1
corrente no estator (A)
V1 tenso no estator (V)
Zeq impedncia equivalente do motor ()
2.2 Microcontrolador
Microcontrolador um componente eletrnico lgico que permite ser programado para que execute uma
determinada tarefa ou um conjunto de tarefas. Um microcontrolador encapsulado em formato de chip e tem vrios
terminais de ligao, nmero este que depende do modelo e das funes disponveis.
Um microcontrolador equivalente a um microcomputador simplificado, pois possui em sua estrutura interna
uma UCP (Unidade Central de Processamento), memria de programa, portas de entrada e sada e circuitos para
funes especficas (conversor AD, lgica PWM, comunicao serial, etc). capaz de executar vrias funes, podendo
ser utilizado em uma vasta gama de aplicaes.
Dentre os principais fabricantes de microcontroladores, destaca-se a Microchip, com a famlia de
microcontroladores PIC.
Para este projeto, foi adotado um microcontrolador PIC 16F877A (figura 7), por ter todas as funes
necessrias ao sistema e possuir muito material bibliogrfico disponvel e de fcil acesso.
O PIC responsvel pelo controle do chaveamento dos transistores, tanto na lgica de chaveamento 6 pulsos 3
a 3 (controle de freqncia) como PWM (controle de amplitude), controle da IHM (interface homem mquina), cujos
comandos so introduzidos por botes, e pelos demais clculos necessrios para a realizao do processo.
Foi utilizada a linguagem C para a criao do programa de controle do microcontrolador, por ser uma
linguagem de alto nvel e facilitar a criao do cdigo, poupando tempo para a execuo das demais etapas do projeto.
Figura 7. Pinagem de um microcontrolador PIC 16F877A
*Para detalhes sobre a pinagem e o microcontrolador, consultar o datasheet do fabricante.
2.3 Fontes de Alimentao
O conjunto de um transformador, um circuito retificador, capacitores e demais componentes que ajustem a
tenso ou corrente necessrias ao funcionamento de um equipamento eletrnico ou eltrico denominado fonte de
alimentao.
Um circuito retificador converte uma tenso alternada em uma tenso contnua. A retificao feita por um
componente ou conjunto de componentes semicondutores, sendo o diodo o mais utilizado.
UNIRP Centro Universitrio de Rio Preto
Inversor de Freqncia Microcontrolado | 2010
A seguir so apresentados dois tipos de circuitos retificadores:
Figura 8. Retificador de meia onda
Figura 9. Retificador de onda completa
Pode-se observar que a corrente contnua na sada uma corrente contnua pulsante. Portanto, para que esta
corrente se torne mais prxima o possvel de uma corrente contnua real, necessrio a utilizao de filtros. O principal
filtro para este propsito o filtro a capacitor.
O capacitor um componente capaz de armazenar energia eltrica, e carregado e descarregado de acordo
com um determinado perodo de tempo (tempo de carga e descarga). Este tempo que determina o quo prximo de
uma corrente contnua real a sada ir chegar.
Para dimensionar um capacitor de filtro, adota-se a equao (6). Este clculo vlido para uma freqncia da
rede de 60Hz e feito com base na corrente que fluir pelo circuito:
Vr =
2,4 I
C
Vr tenso de ripple(ondulao na sada)
I corrente (mA)
C capacitncia (uF)
UNIRP Centro Universitrio de Rio Preto
(6)
Inversor de Freqncia Microcontrolado | 2010
Alm dos componentes anteriormente citados, outros componentes podem ser eventualmente utilizados para
otimizar o desempenho de uma fonte de alimentao, sendo estes a bobina ou indutor, o diodo zener, os CI's reguladores
de tenso, dentre outros.
Duas fontes foram necessrias a este projeto, uma fonte para a etapa inversora (fonte de potncia) e uma para a
etapa de controle (PIC e demais componentes de baixa tenso). Um exemplo bsico de uma fonte com filtro a capacitor
mostrado na figura 10.
Figura 10. Fonte de alimentao simplificada
2.4 Chaveamento 6 Pulsos
O chaveamento de transistores pelo mtodo 6 pulsos consiste em chavear 6 transistores, dispostos 2 em cada
fase de sada do inversor (figura 11), de forma que a tenso na sada seja uma onda quadrada com componente
harmnica fundamental senoidal, que pode ser ajustada com a freqncia desejada, atravs de lgica de programao,
pelo microcontrolador. O mtodo 6 pulsos se divide em dois tipos: 2 a 2 e 3 a 3. O chaveamento 6 pulsos 2 a 2 consiste
em chavear 2 transistores de cada vez em 6 etapas distintas. O 3 a 3 faz o mesmo, s que chaveando 3 transistores a
cada vez. Os transistores a serem acionados devero estar em fases distintas, caso contrrio, um curto-circuito se
originar.
Figura 11. Diagrama de disposio dos transistores no circuito.
Os grficos das figuras 12 e 13, mostram as tenso de fase e neutro e de fase e fase para os chaveamentos 6
pulsos 2 a 2 e 3 a 3, respectivamente.
UNIRP Centro Universitrio de Rio Preto
Inversor de Freqncia Microcontrolado | 2010
Figura 12. Chaveamento 6 pulso 2 a 2.
Figura 13. Chaveamento 6 pulsos 3 a 3.
UNIRP Centro Universitrio de Rio Preto
Inversor de Freqncia Microcontrolado | 2010
O ciclo de chaveamento equivalente freqncia ajustada, e cada etapa do chaveamento se d a 1/6 do
perodo. Cada etapa de chaveamento se d a 60. No chaveamento 6 pulsos 2 a 2, cada transistor conduz por 120. J no
chaveamento 6 pulsos 3 a 3, cada transistor conduz por 180. Dessa forma, ocorre a defasagem de 120 entre as fases.
Tanto no mtodo 2 a 2 como no 3 a 3, no possvel o acionamento conjunto dos transistores que esto
dispostos no mesmo barramento, ou seja, no barramento positivo ou negativo, uma vez que sem a diferena de potencial
no ser gerado o resultado esperado. Sendo assim, no mtodo 2 a 2, um transistor dever estar no barramento negativo
e outro no positivo, e no 3 a 3, um dever estar no negativo e os outros dois no positivo, e vice-versa.
As equaes (7) e (8) mostram os valores das tenses de fase (fase-neutro) e linha (fase-fase) na sada do
inversor para o chaveamento 6 pulsos 2 a 2, e as equaes (9) e (10) mostram estes valores para o chaveamento 6 pulsos
3 a 3.
3
Vcc
Uan
(7)
3
Uab Vcc
(8)
2
Vcc
(9)
2 3
Vcc
(10)
Uan
Uab
Analisando as equaes, observa-se que o chaveamento 6 pulsos 3 a 3 mais eficiente que o 2 a 2, portanto,
este mtodo foi escolhido.
Figura 14. Circuito de chaveamento 6 pulsos
UNIRP Centro Universitrio de Rio Preto
Inversor de Freqncia Microcontrolado | 2010
2.5 PWM(Modulao por Largura de Pulso)
A Modulao por Largura de Pulso ou PWM (Pulse Width Modulation), consiste em gerar uma onda quadrada
com a largura dos pulsos varivel, permitindo desta forma, controlar a amplitude de uma tenso contnua.
Para a gerao desta onda, transistores so chaveados com um sinal PWM e a lgica de chaveamento feita
atravs do microcontrolador.
Alguns microcontroladores possuem uma funo pronta para a gerao de PWM (PIC 16F877A, por exemplo),
facilitando o processo, uma vez que no necessrio criar um bloco de cdigo de programa especfico para este fim.
Figura 15. PWM(Modulao Por Largura de Pulso)
A figura acima mostra uma onda quadrada com largura de pulso de 50% para t1 (ligado) e 50% para t2
(desligado). Para este exemplo, a tenso na sada (valor mdio) ser de 50% do valor da tenso total.
Variando-se ento o tempo t1 (ligado) ou t2 (desligado), podemos controlar a amplitude da tenso na sada, ou
seja, quanto maior o tempo ligado, maior o valor da tenso, e quanto maior o tempo desligado, menor o valor. A
equao (11) mostra o valor mdio da tenso atravs de T1 (ligado) e do perodo (T) do sinal de PWM.
Vm V
T1
T
(11)
Este mtodo de chaveamento foi utilizado na fonte de potncia que alimenta a etapa de chaveamento de 6
pulsos, atravs do chaveamento de um transistor conectado ao barramento CC, podendo-se assim controlar o valor da
amplitude da tenso de acordo com a freqncia, de modo a manter V/F e o torque do motor constantes. A figura 16
mostra um grfico equivalente a um controle V/F. Podemos observar que para freqncias acima da nominal (motores
60HZ), o controle escalar no mais possvel, devido a tenso j estar em seu valor mximo de amplitude.
Figura 16. Controle escalar V/F
UNIRP Centro Universitrio de Rio Preto
10
Inversor de Freqncia Microcontrolado | 2010
2.6 Rampa(Acelerao/Desacelerao Gradual)
Como descrito no item 2.1, durante sua partida, a corrente de um motor se eleva a picos muito altos, podendo
acarretar danos na rede eltrica. Devido a este fato, o inversor de freqncia conta com a funo rampa, ou seja, no
caso de acelerao, o motor parte em uma determinada velocidade e vai aumentando-a sucessivamente durante um
determinado tempo at atingir a freqncia pr-estabelecida.
O valor da corrente de partida depender do tempo que for programado para a rampa, ou seja, quanto maior o
tempo, menor ser a corrente de partida, uma vez que a freqncia inicial ter um pequeno valor, e ser incrementada
gradativamente em conjunto com a tenso (controle V/F), reduzindo a corrente proporcionalmente equao (5).
Para este trabalho, adotou-se uma variao no tempo de rampa de 1 a 5 segundos, sendo uma faixa de tempo
satisfatria para aplicaes simples. Para freqncias abaixo de 20Hz, o tempo de rampa travado em 1 segundo, uma
vez que freqncias menores tero uma tenso de menor amplitude, produzindo correntes de partida menores. Para 2Hz,
no ser executada a rampa, devido ao valor muito baixo da freqncia.
Para realizar a rampa, a freqncia configurada na parametrizao do inversor antes da partida, ser dividida
pelo tempo selecionado em segundos e multiplicado por 4. A primeira parte da diviso ser a freqncia inicial de
chaveamento. Sendo assim, a cada de segundo, o valor da freqncia vai sendo incrementado, realizando uma rampa
contnua. Como a tenso ser reduzida proporcionalmente a freqncia, a corrente de partida tambm ser reduzida na
mesma proporo, ou seja, em pelo menos 4 vezes. Este processo pode ser melhor entendido atravs do fluxograma de
rampa mostrado na figura 22, no item 3.2.
2.7 Sentido de Rotao do Motor
Em determinadas aplicaes, exigido que se inverta o sentido de rotao do motor, para que isso ocorra em
um motor CA trifsico, necessrio inverter uma das fases. Na figura 17 basta trocar L1 com L2, por exemplo.
Essa funo foi incorporada ao projeto, e a inverso feita por lgica de programao, onde o
microcontrolador inverte a seqncia de chaveamento, de forma que uma das fases seja invertida com qualquer uma das
outras duas.
Essa inverso pode ser ativada na parametrizao ou com o inversor em funcionamento, pressionando o boto
INVERT. Quando em funcionamento, a inverso ocorrer em conjunto com a rampa, desacelerando o motor e
posteriormente acelerando-o no sentido inverso.
Figura 17. Ligao simplificada de um motor trifsico
UNIRP Centro Universitrio de Rio Preto
11
Inversor de Freqncia Microcontrolado | 2010
2.8 Interface Homem-Mquina (IHM)
Para permitir ajustar os valores de freqncia, tempo de acelerao e desacelerao (rampa) e sentido de
rotao do motor, foram inseridos ao circuito botes de comando. Um display LCD tambm foi incorporado,
permitindo assim a visualizao dos comandos na tela.
Abaixo esto descritos os botes e suas funes, e a figura 18 mostra o circuito simplificado da IHM:
PROG
I/O
+FREQ
-FREQ
INVERT
entrar e navegar no menu de programao do inversor
ativar e desativar o inversor
aumentar a freqncia ou o tempo de acelerao/desacelerao
diminuir a freqncia ou o tempo de acelerao/desacelerao
inverter o sentido de rotao do motor
Figura 18. Circuito Simplificado da IHM
Durante o funcionamento do inversor, somente possvel alterar a freqncia ou o sentido de rotao, no sendo
possvel alterar o tempo de rampa.
A figura 19 mostra as etapas de parametrizao, sendo a freqncia variando de 2 100hz em mltiplos de 2, a
rampa variando de 1 5s e o sentido definido por 0 horrio ou 1 anti-horrio
Figura 19. Etapas de programao atravs do menu do inversor
UNIRP Centro Universitrio de Rio Preto
12
Inversor de Freqncia Microcontrolado | 2010
3 Desenvolvimento
Aps o estudo da fundamentao terica, o contedo foi reunido e estruturado em um circuito nico de
simulao, podendo assim simular e validar o sistema proposto. Os componentes utilizados no circuito de simulao,
so, em sua maioria, componentes genricos. Na seqncia, o circuito final de simulao e os fluxogramas do programa
do microcontrolador sero apresentados.
3.1 Circuito de Simulao
Aps definidos os padres do circuito e todos os componentes necessrios, foi realizada a sua estruturao,
unindo as informaes mostradas na seo 2.
Para a simulao, foi utilizado o software Proteus, da Labcenter Eletronics, que uma ferramenta til para
estudantes e profissionais que desejam acelerar e melhorar suas habilidades no desenvolvimento de aplicaes
analgicas e digitais.
Aps a criao do circuito atravs do software, vrias etapas de simulao foram realizadas, como por
exemplo, a simulao das fontes de alimentao, a eficincia dos filtros a capacitor, a interface homem-mquina e o
programa de controle, a fim de eliminar qualquer falha que pudesse resultar em uma simulao final errnea. A figura
20 mostra o circuito completo de simulao.
A fonte de alimentao de 5V responsvel por alimentar o microcontrolador e o display de LCD. A entrada
da rede eltrica convencional e foi estabelecida com valor de 18V, como se estivesse passando por um transformador
abaixador de 127V para 18V, transformador este que foi omitido para aliviar a carga de simulao. A tenso alternada
passa por uma ponte retificadora que faz uma retificao de onda completa. A tenso retificada filtrada no capacitor de
2200uF, de forma a deixar a tenso o mais prximo possvel de uma tenso contnua, uma vez que o microcontrolador
muito sensvel a rudos. Por fim, o CI LM7805 regula a tenso em 5V fixo, evitando qualquer variao.
Figura 20. Circuito de simulao completo
UNIRP Centro Universitrio de Rio Preto
13
Inversor de Freqncia Microcontrolado | 2010
A fonte de potncia alimenta o barramento CC do circuito de chaveamento. A entrada equivalente a da rede
eltrica convencional (127V/60Hz), e tambm passa por uma ponte retificadora. A tenso filtrada no capacitor de
2700uF, e sa com valor contnuo de aproximadamente 180V (tenso de pico). Posteriormente, a tenso passa por um
transistor, que chaveado com um sinal PWM a 2kHz, para ajustar o valor mdio da tenso na sada da fonte,
permitindo que esta tenso se relacione com a freqncia do chaveamento 6 pulsos e garantindo que a razo V/F seja
uma constante. O sinal de PWM aplicado ao transistor controlado pelo microcontrolador atravs do programa lgico
de controle.
No circuito de chaveamento 6 pulsos, o sinal de chaveamento tambm controlado pelo microcontrolador, da
mesma forma que o sinal de PWM. Do centro de cada juno entre dois transistores, sai uma fase, formando a sada
trifsica (A, B, C) do inversor de freqncia.
Os botes de comando e o display de LCD formam a interface homem-mquina, ou IHM. Atravs dela torna-se
possvel controlar os parmetros do inversor e visualiz-los na tela de LCD. A funo de cada boto j foi explicada no
item 2.8. Da mesma forma que os sinais de chaveamento, a IHM tambm totalmente controlada pelo
microcontrolador.
3.2 Programao do Microcontrolador
A programao do PIC foi realizada em linguagem C. O compilador utilizado foi o CCS. Este compilador
bem simples de ser utilizado e possui bibliotecas para a programao dos mais variados modelos de microcontroladores
da Microchip.
O programa foi desenvolvido em etapas. Primeiramente foi feito uma rotina para testar a comunicao com o
display de LCD. Posteriormente foi adicionado um boto ao circuito, permitindo a entrada de dados.
As etapas se seguiram de forma a adicionar funcionalidades ao programa, como por exemplo: realizar o
chaveamento dos transistores, permitir a parametrizao do inversor por botes (IHM), permitir a execuo da rampa,
etc.
Todas as etapas foram simuladas e testadas no software, permitindo realizar ajustes e correes antes de
incorpor-las ao programa final.
A figura 21 mostra um fluxograma simplificado que representa o programa de controle do inversor. De uma
forma geral, a varivel Prog controla a etapa de programao do inversor, onde os parmetros so armazenados nas
variveis Freq (freqncia), Rampa (tempo acelerao/desacelerao) e Sentido (sentido de rotao), tambm controla o
acionamento e desacionamento do chaveamento. A varivel Rampa indica se ocorrer ou no uma acelerao ou
desacelerao do motor (essa varivel sempre trabalhar em conjunto com a inverso de sentido e o chaveamento 6
pulsos).
A figura 22 apresenta de forma simplificada a execuo da rotina de rampa de acelerao e/ou desacelerao. A
varivel Tempo_AD armazena o fator de diviso para a freqncia e tambm para o controle de contagem de tempo. O
valor da Rampa, que escolhido na parametrizao do inversor, multiplicado por 4 devido ao estouro de tempo do
TIMER_1 (diretiva interna do microcontrolador responsvel por contagem de tempo) estar configurado para 250ms, ou
seja, de segundo. Desta forma, o incremento de freqncia ser feito de forma suave.
A freqncia ento dividida pelo fator de diviso e repassada varivel Soma, onde esta ltima ser utilizada
para incrementar o novo valor de freqncia que foi calculado para inicializar a rampa. A cada estouro do TIMER_1,
ou seja, a cada 250 milissegundos, ocorre a soma do incremento de freqncia na varivel Freq, e isso se d em
conjunto com o chaveamento 6 pulsos e o PWM, realizando ento a rampa de acelerao/desacelerao.
O processo termina quando a varivel de controle Conta atinge o mesmo valor da varivel Tempo_AD, ento o
chaveamento prossegue de forma normal e com o valor inicial da freqncia antes de realizar a rampa.
UNIRP Centro Universitrio de Rio Preto
14
Inversor de Freqncia Microcontrolado | 2010
INCIO
Freq = 60;
FreqOld = 60;
Rampa = 3;
RampaOld = 3;
Sentido = 0;
SentidoOld = 0;
Executa
Clculos
Exec. Rampa
de Acelerao
e Chaveamento 6P
Prog
Prog =1
Freq
Freq
Prog =1
Freq =
FreqOld
Executa
Clculos
S
S
Rampa
Sentido
FreqOld<- Freq
Prog =1
Executa
Clculos
Sentido =
SentidoOld
Sentido
SentidoOld <- Sentido
Prog
Exec. Rampa
de Desacelerao
e Chaveamento 6P
Prog = 1
S
3
Exec. Rampa
de Desacelerao
e Chaveamento 6P
Figura 21. Fluxograma simplificado do processo
UNIRP Centro Universitrio de Rio Preto
15
Inversor de Freqncia Microcontrolado | 2010
Tempo_AD Rampa x 4
Freq Freq / Tempo_AD
Soma Freq
Conta 1
Configura Interrupes do
TIMER_1
(estouro a cada 250ms)
TIMER_1
(ESTOURO)
Freq Freq + Soma
Conta Conta + 1
Executa Chaveamento 6P com
o Valor da Freq
Desativa as Interrupes
TIMER_1
Conta =
Tempo_AD
Continua a Execuo Normal
do Programa
Chaveamento 6 Pulsos c/ a
Freqncia Parametrizada
Figura 22. Fluxograma de execuo da rampa de acelerao/desacelerao
UNIRP Centro Universitrio de Rio Preto
16
Inversor de Freqncia Microcontrolado | 2010
4 Resultados e Validao
A simulao para validao do projeto foi efetuada com sucesso, e os resultados foram colhidos atravs do
osciloscpio do software de simulao.
4.1 Sinais do Chaveamento 6 Pulsos 3 a 3
A figura 23 mostra os sinais de tenso obtidos na sada do inversor pelo chaveamento 6 pulsos 3 a 3 para cada
fase. As divises da imagem, neste caso, so de 50V na vertical e 2 ms na horizontal e a freqncia de chaveamento
de 60Hz. A cada 120 o chaveamento deslocado para a prxima fase.
Figura 23. Chaveamento 6 pulsos 3 a 3 em cada fase(A, B e C, respectivamente)
4.2 Tenses de Fase e Linha
Os sinais das tenses de fase (fase-neutro) e de linha (fase-fase), obtidos da sada trifsica do inversor para
valores de freqncia de 100, 60 e 20Hz, so mostradas nas figuras 24, 25 e 26 respectivamente. Devido a limitaes do
software de simulao e a interferncias causadas pelo sinal de chaveamento 6 pulsos na sada do circuito de controle de
amplitude, que esto ligados no mesmo barramento, no foi possvel simular o chaveamento PWM em conjunto com o
chaveamento 6 pulsos, ou seja, mostrar o controle V/F em um nico sinal. Portanto a imagens que seguem apresentamse com tenses constantes mesmo com a variao da freqncia. As divises das figuras apresentadas so de 50V na
vertical e de 2ms na horizontal.
UNIRP Centro Universitrio de Rio Preto
17
Inversor de Freqncia Microcontrolado | 2010
Figura 24. Tenso fase(fase-neutro) e linha(fase-fase) a 100Hz
Figura 25. Tenso fase(fase-neutro) e linha(fase-fase) a 60Hz
UNIRP Centro Universitrio de Rio Preto
18
Inversor de Freqncia Microcontrolado | 2010
Figura 26. Tenso fase(fase-neutro) e linha(fase-fase) a 20Hz
Analisando as figuras 24, 25 e 26, possvel observar os valores dos perodos do sinal para cada situao,
comprovando as freqncias em questo.
4.3 Controle de Amplitude
Devido ao problema citado no item anterior, foi efetuada uma simulao da fonte de potncia separada do
chaveamento 6 pulsos.
Os sinais mostrados nas figuras 27, 28, 29 e 30, foram obtidos atravs do barramento V- da fonte de potncia.
Uma vez que o barramento V+ sempre estar com tenso de 180V, pode-se observar que a ddp entre V+ e V- (ver figura
20) ser maior quando o transistor Q7 estiver a maior parte do tempo em conduo, ou seja, aterrando o resistor de
carga (R13). A ddp entre V+ e V- ir diminuindo conforme o transistor Q7 permanecer menos tempo em conduo,
diminuindo assim o tempo em que a carga fica aterrada.
Analisando as figuras e os nveis de tenso, possvel obter o valor mdio de V- para cada situao atravs da
equao (11). Desta forma, efetuando a subtrao entre V+ e V-, ser obtida a ddp na sada da fonte de potncia. Assim,
a relao V/F constante pode ser comprovada.
Figura 27. Sinal V- para freqncia de 60Hz
A figura 27 tambm vlida para freqncias acima de 60Hz, uma vez que, como a ddp entre V+ e V- estar
no seu valor mximo, no possvel modific-la. Portanto, nestes casos no possvel efetuar o controle do torque do
motor pela constante V/F.
UNIRP Centro Universitrio de Rio Preto
19
Inversor de Freqncia Microcontrolado | 2010
Figura 28. Sinal V- para freqncia de 50Hz
Figura 29. Sinal V- para freqncia de 30Hz
Figura 30. Sinal V- para freqncia de 2Hz
UNIRP Centro Universitrio de Rio Preto
20
Inversor de Freqncia Microcontrolado | 2010
4.4 Defasagem
Nas figuras 31 e 32, so mostradas as defasagens das tenses de fase (fase-neutro) entre a fase A e as fases B e
C em 60Hz, comprovando que um sistema de tenses trifsicas fornecido na sada do inversor de freqncia.
Os sinais apresentados nas imagens 31 e 32 foram obtidos atravs de simulao com carga resistiva, devido ao
fato dos rudos apresentados pela carga indutiva dificultarem a visualizao da defasagem.
Figura 31. Defasagem de 120 - fase A e fase B
Figura 32. Defasagem de 240 - fase A e fase C
UNIRP Centro Universitrio de Rio Preto
21
Inversor de Freqncia Microcontrolado | 2010
4.5 Rampa de Acelerao e Desacelerao
Apesar de includa uma funo de rampa no projeto, no foi possvel mostrar com fotos de tela a execuo da
simulao de acelerao e/ou desacelerao, devido ser um processo de mudana contnua no sinal de sada em um
curto espao de tempo. Ainda sim, podemos dizer que as simulaes efetuadas mostraram que a execuo da rampa no
sistema proposto foi satisfatria e uma anlise do fluxograma da figura 22 pode comprovar como o processo
realizado.
4.6 Inverso do Sentido de Rotao do Motor
A inverso do sentido de rotao do motor foi efetuada atravs da inverso da fase B com a fase C. Esta troca
efetuada atravs da modificao da ordem dos transistores a serem acionados pelo chaveamento 6 pulsos. A seqncia
de chaveamento utilizada no programa para o sentido horrio de rotao foi a mesma apresentada no item 2.4. Para a
rotao do motor ser efetuada no sentido anti-horrio, a seqncia de chaveamento dos transistores ficou da seguinte
forma: 1-2-3, 1-2-6, 1-5-6, 4-5-6, 4-5-3 e 4-2-3. Dessa maneira, as fases B e C so invertidas, possibilitando a inverso
no sentido de rotao do motor.
Concluso
Atravs da anlise de todos os resultados demonstrados neste trabalho, possvel concluir que o objetivo
desejado com o sistema proposto foi alcanado. Um sistema trifsico foi obtido na simulao do inversor de freqncia,
possibilitando a variao da freqncia atravs da faixa de valores pr-estabelecida. No foi possvel mostrar a
execuo da rampa de acelerao e desacelerao, pois como um processo contnuo, fica invivel mostr-lo atravs de
imagens. Mesmo assim, podemos afirmar que a rampa foi executada com eficcia. A inverso no sentido de rotao do
motor tambm foi efetuada com sucesso, mostrando que o chaveamento 6 pulsos extremamente eficiente para o
controle de motores trifsicos CA.
Os sinais de tenso apresentados, apesar de serem ondas quadradas, possuem harmnica fundamental senoidal.
Ainda sim, estes, possuem alm da harmnica fundamental, outras harmnicas de ordem mpar, que podem causar
interferncia em outros equipamentos e um pequeno aquecimento no prprio motor que se utiliza deste tipo de inversor
como elemento de comando.
Utilizando o circuito de simulao apresentado e efetuando o correto dimensionamento dos componentes
eletrnicos e adaptaes necessrias, o sistema pode ser implementado em um prottipo, permitindo uma anlise mais
detalhada dos aspectos funcionais do inversor de freqncia.
Agradecimentos
Agradecemos ao professor e orientador Msc. Tcio Luiz de Souza Barbeiro e ao professor co-orientador
Marcos Vincius Pinto e Silva, que alm de contriburem grandiosamente nas aulas ministradas em algumas disciplinas
do curso, orientaram com eficcia a realizao deste trabalho.
Agradecemos tambm aos familiares, amigos e demais professores que participaram direta ou indiretamente.
UNIRP Centro Universitrio de Rio Preto
22
Inversor de Freqncia Microcontrolado | 2010
Bibliografia
BOYLESTAD, Robert L.; NASHELSKY, Louis. Dispositivos Eletrnicos e Teoria de Circuitos. So Paulo: Prentice
Hall, 2004.
FITZGERALD, Arthur E.; KINGSLEY, Charles, Jr.; ESTEPHEN, D. Umans. Eletric Manchinery. 6.ed. New York:
McGraw-Hill, 2003.
PEREIRA, Fbio. Microcontroladores PIC: Programao em C. So Paulo: rica, 2003.
RASHID, Muhammad H. Eletrnica de Potncia: Circuitos, Dispositivos e Aplicaes. So Paulo: Makron Books,
1999.
SERANTOLA, Leonardo P., et al. Inversor CC - CA Trifsico Microcontrolado. Trabalho de Concluso de Curso Engenharia Eltrica, Centro Universitrio de Rio Preto, So Jos do Rio Preto, 2008.
CAPELLI, Alexandre. Dimensionado e Escolhendo o Melhor Motor Segundo a NBR 7094. Mecatrnica Atual, So
Paulo, ano 3, n. 15, p. 29-34, abr./mai. 2004.
UNIRP Centro Universitrio de Rio Preto
23
You might also like
- Introdução à Cartografia: Mapas e Sistemas de CoordenadasDocument15 pagesIntrodução à Cartografia: Mapas e Sistemas de CoordenadasLucas Rangel Rodrigues100% (2)
- Livro de Raciocínio LógicoDocument340 pagesLivro de Raciocínio LógicoRafaela Freitas100% (1)
- Dimensionamento de Vigas para FlexãoDocument9 pagesDimensionamento de Vigas para Flexãorenatos79100% (1)
- 1994 Matematica AFADocument2 pages1994 Matematica AFAReforço Multidisciplinar Aulas ParticularesNo ratings yet
- I2CDocument7 pagesI2CGabriel G. SilvaNo ratings yet
- Mdulo f4 CircuitoselectricoDocument11 pagesMdulo f4 CircuitoselectricoMaria Papoila CrisNo ratings yet
- 04 TaskDocument42 pages04 TaskGabriel G. SilvaNo ratings yet
- CE Aula03 LeisDeKirchhoff NodalDocument9 pagesCE Aula03 LeisDeKirchhoff NodalGabriel G. SilvaNo ratings yet
- Understanding MPLAB HarmonyDocument10 pagesUnderstanding MPLAB HarmonyGabriel G. SilvaNo ratings yet
- Apostila FCDocument138 pagesApostila FCflavioipNo ratings yet
- Aulassobre FiltrosdesinaisDocument9 pagesAulassobre FiltrosdesinaisMadson FranklinNo ratings yet
- Filtros ativos de 1a ordem - resumo e exemplosDocument24 pagesFiltros ativos de 1a ordem - resumo e exemplos'Yuri CardosoNo ratings yet
- EmiDocument13 pagesEmiGabriel G. SilvaNo ratings yet
- PVBB 01 PDFDocument33 pagesPVBB 01 PDFgabriel_augusto6083No ratings yet
- Resolução de problema de calor e 1a lei da termodinâmicaDocument2 pagesResolução de problema de calor e 1a lei da termodinâmicaSaturno FilhoNo ratings yet
- Análise de atividade de ensino a distância sobre Engenharia de SoftwareDocument7 pagesAnálise de atividade de ensino a distância sobre Engenharia de SoftwareTiago FernandoNo ratings yet
- Guia completo para instalação e operação de condicionador de ar GreeDocument54 pagesGuia completo para instalação e operação de condicionador de ar GreeMárcio Henrique Tenório MartinsNo ratings yet
- CRL1509Document2 pagesCRL1509Luis Miguel Vergara Gonzalez100% (1)
- Extrusora de Plástico e Inversor de FrequênciaDocument12 pagesExtrusora de Plástico e Inversor de FrequênciaWagner LemesNo ratings yet
- Matemática - Produtos Notáveis e RacionalizaçãoDocument8 pagesMatemática - Produtos Notáveis e RacionalizaçãoAcibnetNo ratings yet
- Relatorio Duo TrioDocument9 pagesRelatorio Duo TrioAdelaide Silva100% (1)
- Gabarito Lista 1 - Restrição OrçamentáriaDocument4 pagesGabarito Lista 1 - Restrição OrçamentáriaMiguel ArcanjoNo ratings yet
- Escavadeira Hidráulica Com Certificação Tier Iii: Cilindros Hidráulicos Motor Parte RodanteDocument6 pagesEscavadeira Hidráulica Com Certificação Tier Iii: Cilindros Hidráulicos Motor Parte RodantetfkrochaNo ratings yet
- Circuitos CA e Fasores: conceitos básicosDocument30 pagesCircuitos CA e Fasores: conceitos básicosWilsonSimonalNo ratings yet
- Riscos elétricos e mecânicos em instalações, máquinas e equipamentosDocument55 pagesRiscos elétricos e mecânicos em instalações, máquinas e equipamentosJosélia Fátima Carnielo Dias100% (1)
- Transformações Lineares Reflexões RotaçõesDocument19 pagesTransformações Lineares Reflexões RotaçõesRicardo Rodrigo Da SilvaNo ratings yet
- Catálogo Alpe & AritanaDocument36 pagesCatálogo Alpe & AritanacatybarrosfrNo ratings yet
- Exercícios de Física sobre Ondas e VibraçõesDocument6 pagesExercícios de Física sobre Ondas e VibraçõesJhefin Jhef100% (1)
- RESUMO RADIO1 - Técnicas Radiográficas Intrabucais - Interproximal e OclusalDocument3 pagesRESUMO RADIO1 - Técnicas Radiográficas Intrabucais - Interproximal e OclusalSamara Santos100% (1)
- DifracaoDocument8 pagesDifracaoLuiz Carlos GomesNo ratings yet
- ListaIAL 1Document15 pagesListaIAL 1CaioCoelhoNo ratings yet
- Estudo dos gases: leis de Boyle, Charles e transformações isotérmica, isobárica e isovolumétricaDocument10 pagesEstudo dos gases: leis de Boyle, Charles e transformações isotérmica, isobárica e isovolumétricafranquimicoNo ratings yet
- 3serie - NOVODocument5 pages3serie - NOVOMarcelia Lopes Azevedo de SiqueiraNo ratings yet
- Expressoes RegularesDocument10 pagesExpressoes Regulareshack3rg33kNo ratings yet
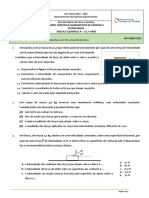
- Física e Química A - Força e MovimentoDocument4 pagesFísica e Química A - Força e MovimentoMaria SilvaNo ratings yet
- Despertar ExcertoDocument11 pagesDespertar ExcertobpuppinNo ratings yet
- PTEC - Subestação compacta pré-fabricadaDocument6 pagesPTEC - Subestação compacta pré-fabricadaStefania OliveiraNo ratings yet
- Bolas carnes enchidosDocument3 pagesBolas carnes enchidosJosé Torcato AlmeidaNo ratings yet
- Ficha de Trabalho Nº22Document3 pagesFicha de Trabalho Nº22diogopintobritoNo ratings yet