You might also like
- CAP - Sistemas de Primer OrdenDocument37 pagesCAP - Sistemas de Primer OrdenAnonymous HdENZfRNo ratings yet
- Maquina de MooreDocument9 pagesMaquina de MooreCarlos CruzNo ratings yet
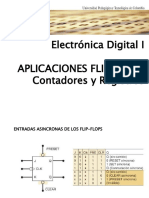
- CONTADORES Y REGISTROS ELECTRÓNICOSDocument16 pagesCONTADORES Y REGISTROS ELECTRÓNICOSLaura VallejoNo ratings yet
- Acciones de ControlDocument55 pagesAcciones de ControlPaolo Andrés Pancho Ramírez0% (1)
- Problemario Estabilidad Segúnda ParteDocument18 pagesProblemario Estabilidad Segúnda ParteCarlos Uriel Martinez TinocoNo ratings yet
- Diagrama de Bloques 2Document3 pagesDiagrama de Bloques 2jguerra3dNo ratings yet
- Respuesta de Sistema de 2do OrdenDocument14 pagesRespuesta de Sistema de 2do OrdenArmando CajahuaringaNo ratings yet
- Practica 4 Moc3011..Document19 pagesPractica 4 Moc3011..JOSSSG0750% (2)
- EXA2G3OI PdfcreatorDocument38 pagesEXA2G3OI PdfcreatorTomas Sanchez TronoNo ratings yet
- Informe Final 1 UtrillaDocument10 pagesInforme Final 1 UtrillaCaptain Underoos0% (1)
- Problema de MuñozDocument44 pagesProblema de MuñozZteven GonzalezNo ratings yet
- Unidad 3 Circuitos HidraulicosDocument20 pagesUnidad 3 Circuitos HidraulicosgacbvmNo ratings yet
- Sistemas en Tiempo ContinuoDocument34 pagesSistemas en Tiempo ContinuoEl CanoeroNo ratings yet
- Modelos Matematicos y Funciones de TransferenciaDocument12 pagesModelos Matematicos y Funciones de TransferenciaFHERFFFNo ratings yet
- Sistema de Control de Posicion Motor C.D.Document8 pagesSistema de Control de Posicion Motor C.D.Yoleiba Nava100% (1)
- Contadores y RegistrosDocument32 pagesContadores y RegistrospepaNo ratings yet
- 10 Contadores Asíncronos (De Rizo)Document6 pages10 Contadores Asíncronos (De Rizo)Ariel BobadillaNo ratings yet
- Introducción A La Modelación de Sistemas ExpoDocument28 pagesIntroducción A La Modelación de Sistemas ExpoMarioNo ratings yet
- Estabilidad de sistemas de control lineal mediante el criterio de Routh HurwitzDocument15 pagesEstabilidad de sistemas de control lineal mediante el criterio de Routh HurwitzMePerdi PeroGracias PorEncontrarme100% (1)
- Laboratorio de Circuitos Digitales 4Document7 pagesLaboratorio de Circuitos Digitales 4Csar PariapazaNo ratings yet
- Laboratorio #3. Respuesta Transitoria y Estacionaria.Document6 pagesLaboratorio #3. Respuesta Transitoria y Estacionaria.Renzo GutiérrezNo ratings yet
- Automatización IndustrialDocument5 pagesAutomatización IndustrialRodrigo RamiroNo ratings yet
- Investigacion IDocument18 pagesInvestigacion IEmmanuel Sanchez NuñezNo ratings yet
- Modelado en El Espacio de EstadosDocument3 pagesModelado en El Espacio de EstadosstvanNo ratings yet
- PUENTE H PDFDocument4 pagesPUENTE H PDFEduardo Ivan Piña Gdc0% (1)
- CI ReguladorVoltajeDocument20 pagesCI ReguladorVoltajeantony bustamanteNo ratings yet
- Tipos de Puente HDocument5 pagesTipos de Puente HCharles HolesNo ratings yet
- Diseño de automatismos con GrafcetDocument57 pagesDiseño de automatismos con GrafcetHectorSandovalNo ratings yet
- Análisis LGR sistemas lazo cerradoDocument41 pagesAnálisis LGR sistemas lazo cerradoWalter Ernest Muñoz MedinaNo ratings yet
- El Lugar Geométrico de RaicesDocument14 pagesEl Lugar Geométrico de RaicesLuis LNo ratings yet
- Laboratorio de Control Ii Diagrama de Bode, Nyquist y NicholsDocument20 pagesLaboratorio de Control Ii Diagrama de Bode, Nyquist y Nicholsrosario arenas dionicioNo ratings yet
- 1 - Introduccion A La Ca PDFDocument20 pages1 - Introduccion A La Ca PDFMiguel FerrerNo ratings yet
- Movimiento de RototraslacionDocument6 pagesMovimiento de RototraslacionFranciscoNo ratings yet
- Densidad de Flujo ElectricoDocument6 pagesDensidad de Flujo ElectricoCarlos Ramirez RicoNo ratings yet
- Ensayo de Control 1 (Control Digital)Document5 pagesEnsayo de Control 1 (Control Digital)Paul GuillenNo ratings yet
- Sensores QTR RCDocument8 pagesSensores QTR RCEdwin Yesidh Rios Contreras100% (1)
- Comportamiento de Los Transistores BJTDocument11 pagesComportamiento de Los Transistores BJTAlexisTamayoNo ratings yet
- Manual para Sistema de Seguridad Casero Con Cerradura Solenoide y Arduino UNODocument48 pagesManual para Sistema de Seguridad Casero Con Cerradura Solenoide y Arduino UNOChristopher MoranNo ratings yet
- Lab - Flip FlopDocument7 pagesLab - Flip Flopomar0sandoval0timanaNo ratings yet
- Mealy y Moore Preparatorio Arreglado 1Document6 pagesMealy y Moore Preparatorio Arreglado 1Jesus Andres Intriago VelezNo ratings yet
- Capítulo #2 Modelado Matemático de Sistemas de ControlDocument76 pagesCapítulo #2 Modelado Matemático de Sistemas de ControlHector Vergara100% (3)
- Acción de Control de Dos Posiciones o de Encendido y ApagadoDocument5 pagesAcción de Control de Dos Posiciones o de Encendido y ApagadoEvelyn ArredondoNo ratings yet
- Error en Estado Estacionario ResueltoDocument9 pagesError en Estado Estacionario ResueltoTrabajos AcademicosNo ratings yet
- Álgebra de Diagrama de Bloques.Document43 pagesÁlgebra de Diagrama de Bloques.Daniel Felipe Ardila Guerrero100% (1)
- Análisis de La Respuesta Transitoria y EstacionariaDocument27 pagesAnálisis de La Respuesta Transitoria y EstacionariaAlfredo Gil Velasco100% (1)
- Arrays Leds 11x11 LABVIEWDocument11 pagesArrays Leds 11x11 LABVIEWcheNo ratings yet
- Ejercicos en Atmega 164p Uso de Inteepciones de Los PorticosDocument4 pagesEjercicos en Atmega 164p Uso de Inteepciones de Los PorticosWilmer Villegas CodenaNo ratings yet
- Oscilador de RelajacionDocument11 pagesOscilador de RelajacionSara Rodríguez BlancoNo ratings yet
- Mecatrónica: modelado, simulación y control de sistemas físicosFrom EverandMecatrónica: modelado, simulación y control de sistemas físicosNo ratings yet
- Ejercicios Resueltos de Lugar de RaicesDocument33 pagesEjercicios Resueltos de Lugar de RaicesMiGuel67% (3)
- Ejercicios Resueltos EstabilidadDocument13 pagesEjercicios Resueltos EstabilidadWilfredoCajoCarmona0% (2)
- Cap005 Tecnica Del Lugar de Las RaicesDocument36 pagesCap005 Tecnica Del Lugar de Las RaicesBismarck Aliaga RojasNo ratings yet
- Actividades Control de ProcesosDocument26 pagesActividades Control de ProcesosDaniel PalaciosNo ratings yet
- Lugar Geometrico de Las RaicesDocument33 pagesLugar Geometrico de Las RaicesSergio CastroNo ratings yet
- LGR Método EVANS PDFDocument11 pagesLGR Método EVANS PDFJohan SantiagoNo ratings yet
- Root LocusDocument37 pagesRoot LocusArturo Arévalo FloresNo ratings yet
- Examen de Control Automatico Espol 2014Document14 pagesExamen de Control Automatico Espol 2014Jose Cueva Tumbaco100% (1)
- Problemas Root LocusDocument4 pagesProblemas Root LocusNicolas David Cabanillas AraujoNo ratings yet
- Capitulo3 Analisis LGRDocument12 pagesCapitulo3 Analisis LGRNina RamirezNo ratings yet
- Tempo Riz AdoresDocument18 pagesTempo Riz AdoresGustavo Mario Torres SantamaríaNo ratings yet
- LiberarTeléfonosGRATIS PDFDocument2 pagesLiberarTeléfonosGRATIS PDFFabricio SanchezNo ratings yet
- Tempo Riz AdoresDocument18 pagesTempo Riz AdoresGustavo Mario Torres SantamaríaNo ratings yet
- Metodo de KarnaughDocument8 pagesMetodo de KarnaughagarciaNo ratings yet
- Inf. Elementos DeslizantesDocument4 pagesInf. Elementos DeslizantesDaniloCHNo ratings yet
- El Transistor PDFDocument6 pagesEl Transistor PDFVarinuk Na NanukNo ratings yet
- 844817156XDocument22 pages844817156XAlejandro Camacho100% (1)
- Tiristores 1Document18 pagesTiristores 1Frank Pizarro IbáñezNo ratings yet
- Rodamientos Inf (Recuperado)Document7 pagesRodamientos Inf (Recuperado)Fabricio SanchezNo ratings yet
- Metodo de KarnaughDocument8 pagesMetodo de KarnaughagarciaNo ratings yet
- El Transistor PDFDocument6 pagesEl Transistor PDFVarinuk Na NanukNo ratings yet
- Tanques de AlmacenamientoDocument8 pagesTanques de AlmacenamientojapeleNo ratings yet
- Tema 1 Que Es Una Investigacion CientificaDocument18 pagesTema 1 Que Es Una Investigacion CientificaFabricio SanchezNo ratings yet
- Manua Poleas en V Intermec PDFDocument112 pagesManua Poleas en V Intermec PDFJhonRC100% (3)
- Inf. Elementos DeslizantesDocument4 pagesInf. Elementos DeslizantesDaniloCHNo ratings yet
- Presion y EntalpiaDocument21 pagesPresion y EntalpiaAna CristinaNo ratings yet
- Tipos de Investigacion Cientifica1Document28 pagesTipos de Investigacion Cientifica1Steven HicksNo ratings yet
- Silabo Ingeniería Eléctrica 2014-5Document6 pagesSilabo Ingeniería Eléctrica 2014-5llGarUllNo ratings yet
- Rodamientos Soportes de BridaDocument24 pagesRodamientos Soportes de Bridahuguio280% (1)
- Tipos de CojinetesDocument5 pagesTipos de CojinetesPeter HudsonNo ratings yet
- Partes Por Millón de Co2 FayoDocument5 pagesPartes Por Millón de Co2 FayoFabricio SanchezNo ratings yet
- Partes Por Millón de Co2 FayoDocument5 pagesPartes Por Millón de Co2 FayoFabricio SanchezNo ratings yet
- Tipos y Especificaciones de Rodamientos.Document18 pagesTipos y Especificaciones de Rodamientos.Erick Javier Torres Manotas.89% (47)
- Informe Gestion 2014 01Document206 pagesInforme Gestion 2014 01Fabricio SanchezNo ratings yet
- Arme y Desarme de Un Motor ElectricoDocument7 pagesArme y Desarme de Un Motor Electricosemagor100% (3)
- Lejislacion LaboralDocument3 pagesLejislacion LaboralFabricio SanchezNo ratings yet
- Niveles de IluminaciónDocument4 pagesNiveles de IluminaciónFabricio Sanchez100% (1)
- Fallas en Un Motor ElectricoDocument4 pagesFallas en Un Motor ElectricoFabricio SanchezNo ratings yet
- Actividad 15 TrigonometriaDocument4 pagesActividad 15 TrigonometriaSaEsNaNo ratings yet
- Redmodular 120304134427 Phpapp02Document44 pagesRedmodular 120304134427 Phpapp02josetecoNo ratings yet
- Ejercicios de DerivadasDocument1 pageEjercicios de DerivadasHipolito ReyesNo ratings yet
- Movimiento Cirular - Cinematica - GrupalDocument27 pagesMovimiento Cirular - Cinematica - GrupalelyNo ratings yet
- Evaluacion de GeometriaDocument1 pageEvaluacion de GeometriaBoris Raynier Nieto ArrietaNo ratings yet
- Ejercicios de CalculoDocument6 pagesEjercicios de CalculoL Manuel CruzNo ratings yet
- Prueba de MatematicaDocument3 pagesPrueba de MatematicaHassem Raul Guerra CordobaNo ratings yet
- Solucion 216 Al 240 Poligonos RegularesDocument51 pagesSolucion 216 Al 240 Poligonos RegularesNicolle Campos chamorroNo ratings yet
- Prueba de Retroalimentacion No.4 SolucionDocument2 pagesPrueba de Retroalimentacion No.4 SolucionJorge OviedoNo ratings yet
- Matemáticas II Nayarit Siglo XXIDocument3 pagesMatemáticas II Nayarit Siglo XXIHectoriin M. RodriguezNo ratings yet
- Física IDocument12 pagesFísica IAntonio Montalvo CorreaNo ratings yet
- 2 - 1 - Sistemas de Coordenadas en GeodesiaDocument124 pages2 - 1 - Sistemas de Coordenadas en GeodesiaMacbijegs Gutiérrez GarcíaNo ratings yet
- R.rorty: Heideger. Contingencia y PragmatismoDocument17 pagesR.rorty: Heideger. Contingencia y PragmatismoVenancio DomínguezNo ratings yet
- Ejercicios MruvDocument3 pagesEjercicios MruvJireh NeiraNo ratings yet
- Unidad Didáctica - Geometría SextoDocument6 pagesUnidad Didáctica - Geometría SextoMadeleine Shiloh Ackles PittNo ratings yet
- Apuntes Nivelacion MatematicasDocument29 pagesApuntes Nivelacion MatematicasGonzalo HernandezNo ratings yet
- Polígonos: Definición 1. Un Polígono (Simple) Es La Unión de Finitos Segmentos Que Se Tocan Solo en LosDocument48 pagesPolígonos: Definición 1. Un Polígono (Simple) Es La Unión de Finitos Segmentos Que Se Tocan Solo en LosSofía SantibáñezNo ratings yet
- Grupo 4-Monografía-Integrales en La FísicaDocument21 pagesGrupo 4-Monografía-Integrales en La FísicaPRINS JEREMY VILLEGAS JULCANo ratings yet
- Movimiento circular uniforme (MCUDocument16 pagesMovimiento circular uniforme (MCUsergioNo ratings yet
- Problemas VectoresDocument9 pagesProblemas VectoresIsabel CárdenasNo ratings yet
- Prueba de Geometria 4°Document3 pagesPrueba de Geometria 4°Rosa Quintanilla Venegas100% (1)
- 6.4 Derivadas InfinitasDocument6 pages6.4 Derivadas InfinitasJ Luis MlsNo ratings yet
- Taller - Semanal 10Document10 pagesTaller - Semanal 10Gerson Eheyen GuarnizoNo ratings yet
- Centro de Gravedad y Centroide6Document86 pagesCentro de Gravedad y Centroide6graceNo ratings yet
- Laboratorio Resistencia 3,4 FinalDocument18 pagesLaboratorio Resistencia 3,4 FinalEsneidis Amaya OrtizNo ratings yet
- Cap 02 FMDocument26 pagesCap 02 FMMaria FernandezNo ratings yet
- Congruencia de Los Números EnterosDocument5 pagesCongruencia de Los Números EnteroskatherinemichelNo ratings yet
- 53 E.050 Suelos y CimentacionesDocument56 pages53 E.050 Suelos y CimentacionesJOSE MONTENEGRONo ratings yet
- Ficha 7 Matemática: Las Transformaciones Geométricas en El Antiguo PerúDocument11 pagesFicha 7 Matemática: Las Transformaciones Geométricas en El Antiguo PerúBruno Beltran67% (3)
- Problemas ExtraDocument3 pagesProblemas Extravictor xdNo ratings yet