You might also like
- Ieotab 3Document4 pagesIeotab 3Kayla DollenteNo ratings yet
- Fresh or Recycled Water Logs And/or Chips: Wood PreparationDocument1 pageFresh or Recycled Water Logs And/or Chips: Wood PreparationKayla DollenteNo ratings yet
- Thinkpad X13 Yoga Gen 2 User GuideDocument66 pagesThinkpad X13 Yoga Gen 2 User GuideKayla DollenteNo ratings yet
- Meralco Bill 409851010101 10232021 - 1Document2 pagesMeralco Bill 409851010101 10232021 - 1Kayla DollenteNo ratings yet
- Orifice Plate Test ResultsDocument10 pagesOrifice Plate Test ResultsKayla DollenteNo ratings yet
- St. Jude Novena PrayerDocument2 pagesSt. Jude Novena PrayerKayla DollenteNo ratings yet
- 1997 11 14 Guide Pulppaper JD Fs2Document3 pages1997 11 14 Guide Pulppaper JD Fs2Yudhi Dwi KurniawanNo ratings yet
- Aeotab 12Document12 pagesAeotab 12Kayla DollenteNo ratings yet
- Petroleum Whitepaper 7-15-2013Document68 pagesPetroleum Whitepaper 7-15-2013Kayla DollenteNo ratings yet
- E302Document4 pagesE302Kayla DollenteNo ratings yet
- Chemical Engineering Lab Drying Experiment ResultsDocument2 pagesChemical Engineering Lab Drying Experiment ResultsKayla DollenteNo ratings yet
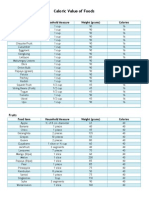
- Caloric Value of FoodsDocument3 pagesCaloric Value of FoodsKayla DollenteNo ratings yet
- 79 e 4150 D 6054 Be 6034Document9 pages79 e 4150 D 6054 Be 6034Kayla DollenteNo ratings yet
- Drying Curves of Non-Porous SolidsDocument6 pagesDrying Curves of Non-Porous SolidsKayla DollenteNo ratings yet
- Diagnostic Exam Review Phy10Document24 pagesDiagnostic Exam Review Phy10Kayla DollenteNo ratings yet
- E301Document3 pagesE301Kayla DollenteNo ratings yet
- 86 Measuring A Discharge Coefficient of An Orifice For An Unsteady Compressible FlowDocument5 pages86 Measuring A Discharge Coefficient of An Orifice For An Unsteady Compressible FlowKayla DollenteNo ratings yet
- Flow Measurements Using OrificeDocument4 pagesFlow Measurements Using OrificeKovačević DarkoNo ratings yet
- Quadratic Relation and FunctionsDocument37 pagesQuadratic Relation and FunctionsKayla DollenteNo ratings yet
- Chanson de Roland - Full SummaryDocument16 pagesChanson de Roland - Full SummaryKayla DollenteNo ratings yet
- Prayer Before ExaminationDocument2 pagesPrayer Before ExaminationKayla DollenteNo ratings yet
- Ir Presentation PDFDocument17 pagesIr Presentation PDFMarr BarolNo ratings yet
- Diagnostic Exam Review Phy10Document24 pagesDiagnostic Exam Review Phy10Kayla DollenteNo ratings yet
- Chipping Initial Cooking Washing Debarking Screening: Refining (Continuous Digester)Document1 pageChipping Initial Cooking Washing Debarking Screening: Refining (Continuous Digester)Kayla DollenteNo ratings yet
- IRR of RA 9297Document21 pagesIRR of RA 9297Peter Jake Patriarca0% (1)
- Eulers MethodDocument3 pagesEulers MethodKayla DollenteNo ratings yet
- Dr. Neal Bushaw: at atDocument3 pagesDr. Neal Bushaw: at atKayla DollenteNo ratings yet
- School of Chemical Engineering and Chemistry: Mapua Institute of TechnologyDocument2 pagesSchool of Chemical Engineering and Chemistry: Mapua Institute of TechnologyKayla DollenteNo ratings yet
- Boyce/Diprima 10 Ed, CH 1.1: Basic Mathematical Models Direction FieldsDocument27 pagesBoyce/Diprima 10 Ed, CH 1.1: Basic Mathematical Models Direction FieldsKayla DollenteNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- What Is Computer ScienceDocument2 pagesWhat Is Computer ScienceRalph John PolicarpioNo ratings yet
- Ascon IO XS ENDocument1 pageAscon IO XS ENthiodoroNo ratings yet
- U50SI1 Schematics OverviewDocument32 pagesU50SI1 Schematics OverviewHamter YoNo ratings yet
- Ece Upcp ResumeDocument1 pageEce Upcp Resumeapi-532246334No ratings yet
- Instructions For CX ProgrammerDocument1,403 pagesInstructions For CX Programmergustavoxr650No ratings yet
- Nordson p4 p7 p10 PDFDocument319 pagesNordson p4 p7 p10 PDFRicardo CruzNo ratings yet
- MTINV 1-D interpretation of magnetotelluric EM soundingsDocument8 pagesMTINV 1-D interpretation of magnetotelluric EM soundingsAnnisa Trisnia SNo ratings yet
- HLR9820-Configuration Guide (V900R003C02 04, Db2)Document105 pagesHLR9820-Configuration Guide (V900R003C02 04, Db2)ynocNo ratings yet
- SEW Eurodrive Gearmotors PDFDocument23 pagesSEW Eurodrive Gearmotors PDFDeki PurnayaNo ratings yet
- Process Synchronization: Critical Section ProblemDocument8 pagesProcess Synchronization: Critical Section ProblemLinda BrownNo ratings yet
- ECG Circuit Design & ImplementationDocument1 pageECG Circuit Design & ImplementationJack MarshNo ratings yet
- User Manual: Series X - Maritime Multi Computer (MMC) ModelsDocument69 pagesUser Manual: Series X - Maritime Multi Computer (MMC) ModelsMariosNo ratings yet
- One-Instruction Set Computer - WikipediaDocument15 pagesOne-Instruction Set Computer - WikipediaAnuja SatheNo ratings yet
- EM 9280 Compactline EM 9380 Compactline: English Technical Service ManualDocument46 pagesEM 9280 Compactline EM 9380 Compactline: English Technical Service ManualIrimia MarianNo ratings yet
- DC DC Converter Simulation White PaperDocument12 pagesDC DC Converter Simulation White PaperGiulio Tucobenedictopacifjuamar RamírezbettiNo ratings yet
- Instruction Manual EDB245-420 1Document30 pagesInstruction Manual EDB245-420 1rpshvjuNo ratings yet
- Java (TM) 6 Update 27 - UninstallDocument62 pagesJava (TM) 6 Update 27 - UninstallChirag PanditNo ratings yet
- Stack Overflows: Reversed Hell Networks - Creative Research FacilityDocument16 pagesStack Overflows: Reversed Hell Networks - Creative Research FacilityLeandro MussoNo ratings yet
- Edge Adaptive Image Steganography Based On LSB Matching Revisited CodeDocument24 pagesEdge Adaptive Image Steganography Based On LSB Matching Revisited Codegangang1988No ratings yet
- SPNGN1101SG Vol2Document376 pagesSPNGN1101SG Vol2Dwi Utomo100% (1)
- Japanese Otome Games For Learners - Japanese Otome Games Sorted by Japanese DifficultyDocument9 pagesJapanese Otome Games For Learners - Japanese Otome Games Sorted by Japanese DifficultyJessicaNo ratings yet
- 12 Important Specifications of Graphics Card Explained - The Ultimate Guide - BinaryTidesDocument13 pages12 Important Specifications of Graphics Card Explained - The Ultimate Guide - BinaryTidespoptot000No ratings yet
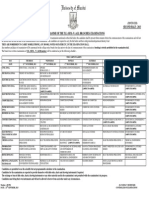
- TE Sem V Exam Schedule 2013Document1 pageTE Sem V Exam Schedule 2013Rahul RawatNo ratings yet
- DECA User Manual: July 20, 2017Document134 pagesDECA User Manual: July 20, 2017ADHITYANo ratings yet
- Accutorr V Service ManualDocument125 pagesAccutorr V Service ManualMiguel IralaNo ratings yet
- CRS328-24P-4S+RM - 28 Port 1GbE Switch with 24 PoE+ PortsDocument2 pagesCRS328-24P-4S+RM - 28 Port 1GbE Switch with 24 PoE+ Portsargame azkaNo ratings yet
- Plasma TV: User ManualDocument38 pagesPlasma TV: User ManualTony CharlesNo ratings yet
- DCP Orientation HandbookDocument30 pagesDCP Orientation HandbookOnin C. OpeñaNo ratings yet
- BACnet MS TP Configuration Guide PN50032 Rev A Mar 2020Document14 pagesBACnet MS TP Configuration Guide PN50032 Rev A Mar 2020litonNo ratings yet
- How To Add and Clear Items in A ListBox ControlDocument7 pagesHow To Add and Clear Items in A ListBox ControlAdrian AlîmovNo ratings yet