You might also like
- Informe Del Aula de Innovacion PedagogicaDocument1 pageInforme Del Aula de Innovacion PedagogicaAntony Yupanqui Torpoco0% (1)
- Raz. Mat. Iv BimDocument25 pagesRaz. Mat. Iv BimAntony Yupanqui TorpocoNo ratings yet
- Guía SmartArtDocument9 pagesGuía SmartArtAnonymous iu95trpxNNo ratings yet
- Detalle de Pastoral 01Document1 pageDetalle de Pastoral 01Antony Yupanqui TorpocoNo ratings yet
- Proyeccion de La Demanda Electrica Vegetativa Del Sein - DesbloqueadoDocument12 pagesProyeccion de La Demanda Electrica Vegetativa Del Sein - DesbloqueadoAntony Yupanqui TorpocoNo ratings yet
- El Manual Del PendejoDocument16 pagesEl Manual Del PendejoJesús IbarraNo ratings yet
- Compensador Estático Síncrono - STATCOM - WanlidaDocument2 pagesCompensador Estático Síncrono - STATCOM - WanlidaAntony Yupanqui TorpocoNo ratings yet
- Manual IdentidadDocument64 pagesManual IdentidadAntony Yupanqui TorpocoNo ratings yet
- Clase 15Document16 pagesClase 15Jere OlivieriNo ratings yet
- 1871-Revista de España. 7-1871, N.º 21 Importante Citan A SabDocument640 pages1871-Revista de España. 7-1871, N.º 21 Importante Citan A SabXascon TxikiNo ratings yet
- Manejo Seguro de Armas de FuegoDocument20 pagesManejo Seguro de Armas de FuegoOlguita Lucia Remolina100% (1)
- Diseño Del Sistema de Puesta A Tierra de Una Planta Termoeléctrica de Generación PDFDocument110 pagesDiseño Del Sistema de Puesta A Tierra de Una Planta Termoeléctrica de Generación PDFAlbertoCedeñoNo ratings yet
- Solicitud de Inscripcion 22-23Document2 pagesSolicitud de Inscripcion 22-23Aaron GonzalezNo ratings yet
- 2 Plan OracionDocument7 pages2 Plan OracionJohaniita FuentezNo ratings yet
- 30ma Clase. Potencial de Membrana. 19-07-18 Prof. Pedro Pieruzzini. Maria Gabriela Pino y Darwin Plaza PDFDocument19 pages30ma Clase. Potencial de Membrana. 19-07-18 Prof. Pedro Pieruzzini. Maria Gabriela Pino y Darwin Plaza PDFdarwin plazaNo ratings yet
- Teorias Psicoafectivas de FREUDDocument19 pagesTeorias Psicoafectivas de FREUDLizz MartinezNo ratings yet
- Https WWW - Mortal-Kombat - Org Guias Guia Mk1Document3 pagesHttps WWW - Mortal-Kombat - Org Guias Guia Mk1Martin CatalánNo ratings yet
- Termodinamica (Toberas)Document13 pagesTermodinamica (Toberas)NAYELY BELLODASNo ratings yet
- Navegando Mine SihtDocument19 pagesNavegando Mine SihtYari Diaz LicuimeNo ratings yet
- Revista REGyO UC v4n82020Document217 pagesRevista REGyO UC v4n82020Wladimir Chacón-ParedesNo ratings yet
- Tarea Logistica (2 - 4)Document6 pagesTarea Logistica (2 - 4)Anonymous FezJJ6bINo ratings yet
- Presentación RIC 06 - Puestaatierra - 270521Document33 pagesPresentación RIC 06 - Puestaatierra - 270521Erik Cristopher Sobarzo LazoNo ratings yet
- Presentación de ABR RetoDocument15 pagesPresentación de ABR RetoPATTSI DANALIS FERNANDEZ LAURANo ratings yet
- Ecologia I Introduccion Organismos y Poblaciones PG 72 94 PDFDocument23 pagesEcologia I Introduccion Organismos y Poblaciones PG 72 94 PDFEdgar Meneses MoranNo ratings yet
- Clase de Problemas N°7Document3 pagesClase de Problemas N°7Victoria HumbertoNo ratings yet
- 6bsico Publicidadypropaganda 161111073649Document3 pages6bsico Publicidadypropaganda 161111073649Jonatan Barraza TorrecillaNo ratings yet
- Buenos Dias Mina Justa 2022.07.08Document5 pagesBuenos Dias Mina Justa 2022.07.08Eloy Ayna AduviriNo ratings yet
- Cuota de Pantalla Obras de Cine - Analisis Comparado - Final - v3Document9 pagesCuota de Pantalla Obras de Cine - Analisis Comparado - Final - v3Tripolina ZukNo ratings yet
- Prehistoria y Edad Media de EnfermeriaDocument5 pagesPrehistoria y Edad Media de EnfermeriaHenry Fernando ILTW0% (1)
- Clasificacion de Los HierrosDocument19 pagesClasificacion de Los HierrosCarlos Asqui100% (1)
- MKT EyO-mba-18 OkDocument172 pagesMKT EyO-mba-18 OkCrisstian Maximiliano VianoNo ratings yet
- Cuadro Comparativo Modelos PedagogicosDocument3 pagesCuadro Comparativo Modelos PedagogicosDiana Aguilar100% (1)
- Test Estilo de AprendizajeDocument6 pagesTest Estilo de AprendizajeWily G̶u̶a̶y̶a̶c̶ L̶u̶c̶a̶n̶o̶No ratings yet
- Proyecto de Instalaciones Electricas Interiores de Un IndustriaDocument9 pagesProyecto de Instalaciones Electricas Interiores de Un IndustriaJose Luis BelitoNo ratings yet
- Ficha Tecnica PasteurizadoraDocument2 pagesFicha Tecnica Pasteurizadoraana maria arvelaez100% (2)
- Como Calcular El Capacitor de Un Motor MonofasicoDocument6 pagesComo Calcular El Capacitor de Un Motor MonofasicoGerman Gabriel FernandezNo ratings yet
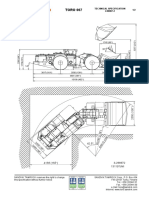
- Ficha Tecnica Toro 007Document2 pagesFicha Tecnica Toro 007Jose CarmonaNo ratings yet
- Tipos de Editores de TextoDocument7 pagesTipos de Editores de Textoleo081989No ratings yet