You might also like
- Basic Elec Theory Week 2Document85 pagesBasic Elec Theory Week 2Michael WheelerNo ratings yet
- Em - 16 MarksDocument14 pagesEm - 16 MarkskesavantNo ratings yet
- ECE 252 Introduction To Electrical Engineering: Lesson 19. MotorsDocument9 pagesECE 252 Introduction To Electrical Engineering: Lesson 19. MotorsPhillip ChirongweNo ratings yet
- Starting of DC MotorDocument7 pagesStarting of DC Motorabbas bilalNo ratings yet
- Single Phase Induction Motor Cross-Field TheoryDocument15 pagesSingle Phase Induction Motor Cross-Field TheoryShoaib Khan100% (1)
- Unit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorDocument13 pagesUnit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorPratik SarkarNo ratings yet
- Induction Motor Braking - Regenerative, Plugging &+ PDFDocument8 pagesInduction Motor Braking - Regenerative, Plugging &+ PDFTechnical boxNo ratings yet
- Kreatryx Koncept Pock PDFDocument8 pagesKreatryx Koncept Pock PDFTechnical boxNo ratings yet
- Induction Motor ControlDocument22 pagesInduction Motor ControlSenpai TashiNo ratings yet
- Ee LawDocument11 pagesEe LawI am Just TrollingNo ratings yet
- What Is Meant by A Load On A Generator? A Load On A Motor?Document9 pagesWhat Is Meant by A Load On A Generator? A Load On A Motor?I am Just TrollingNo ratings yet
- Braking of Electric Motors: Need..... ?Document8 pagesBraking of Electric Motors: Need..... ?Ramesh VeerNo ratings yet
- EMII - Lecture 14 - Synchronous MachinesDocument10 pagesEMII - Lecture 14 - Synchronous MachinesHassan Al BaityNo ratings yet
- Motor StartersDocument9 pagesMotor Startersanon_896479742No ratings yet
- SUB. BY:-Satinder Thakur RB4802B52 Regd:-1812444Document7 pagesSUB. BY:-Satinder Thakur RB4802B52 Regd:-1812444shailesh singhNo ratings yet
- Lab 07 - DC MotorsDocument9 pagesLab 07 - DC MotorsChamila SumathiratnaNo ratings yet
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDocument6 pagesPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniNo ratings yet
- Single Phase Induction MotorDocument7 pagesSingle Phase Induction MotorReeta Dutta100% (1)
- Regenerative Braking of Induction MotorDocument27 pagesRegenerative Braking of Induction MotorcoolkannaNo ratings yet
- Unit1 - AC Commutator MotorsDocument13 pagesUnit1 - AC Commutator MotorsRishi Kant Sharma100% (1)
- Shunt-Wound Motor Final ReportDocument12 pagesShunt-Wound Motor Final ReportJeco Roy OsorioNo ratings yet
- DC Motor PrincipleDocument15 pagesDC Motor Principlecode scribd100% (1)
- Induction Motor BrakingDocument7 pagesInduction Motor BrakingJM4 - ANo ratings yet
- Motorola Application NotesDocument10 pagesMotorola Application Notesvasudeva yasasNo ratings yet
- DC Motor StartersDocument2 pagesDC Motor StartersJoko PriyantoNo ratings yet
- Different Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesDocument7 pagesDifferent Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesKidus DawitNo ratings yet
- DC Motor Drives Unit-II GuideDocument32 pagesDC Motor Drives Unit-II GuidesangsangicnuNo ratings yet
- DC Motors: Characteristics, Control, ApplicationsDocument16 pagesDC Motors: Characteristics, Control, ApplicationsBelayet RonyNo ratings yet
- DC Shunt Motor: Construction, Working, Speed Control & ApplicationsDocument7 pagesDC Shunt Motor: Construction, Working, Speed Control & ApplicationsGhost ReaconNo ratings yet
- Synchronous Motor Working Principle and Starting MethodsDocument21 pagesSynchronous Motor Working Principle and Starting MethodsPrasad YadavNo ratings yet
- Starting and Braking of Induction MotorDocument15 pagesStarting and Braking of Induction MotorSOURABH MONGRANo ratings yet
- Chapter 6 - Induction Motors (Part1)Document18 pagesChapter 6 - Induction Motors (Part1)SanjanaLakshmiNo ratings yet
- DC Motors Advantages and Disadvantages Over AC MotorsDocument9 pagesDC Motors Advantages and Disadvantages Over AC MotorsAnonymous 22VivgHlNo ratings yet
- Experiment Number 1Document7 pagesExperiment Number 1saksham mahajanNo ratings yet
- Rohini 11967264535Document9 pagesRohini 11967264535Chayan MondalNo ratings yet
- Synchronous Motors: Compensator. It Behaves As A Variable Capacitor When The Field IsDocument11 pagesSynchronous Motors: Compensator. It Behaves As A Variable Capacitor When The Field Ispriyanka2711_dubeyNo ratings yet
- EM - Solutions To Question Bank 2022-23Document53 pagesEM - Solutions To Question Bank 2022-23Kubera U100% (2)
- DC Motors ExplainedDocument31 pagesDC Motors ExplainedRajeev ValunjkarNo ratings yet
- Notes of CH 2 TractionDocument9 pagesNotes of CH 2 Tractionbagathariya dharaNo ratings yet
- Electrical Braking of Three Phase Induct PDFDocument4 pagesElectrical Braking of Three Phase Induct PDFFranc Lami100% (1)
- Driving DC Motors-CD00003791Document7 pagesDriving DC Motors-CD00003791Dan EsentherNo ratings yet
- 3-Point Starter NotesDocument5 pages3-Point Starter NotesBobbyNo ratings yet
- DcmotorsDocument16 pagesDcmotorskaran113No ratings yet
- DC MotorDocument6 pagesDC MotorLeandro CamargoNo ratings yet
- STARTING AND SPEED CONTROL OF INDUCTION MOTORSDocument9 pagesSTARTING AND SPEED CONTROL OF INDUCTION MOTORSSolomon NyekoNo ratings yet
- Electrical Machines Final AssignmentDocument13 pagesElectrical Machines Final Assignmentaamir.faiazNo ratings yet
- Voltage and Current Equation of A Shunt Wound DC MotorDocument4 pagesVoltage and Current Equation of A Shunt Wound DC MotorBangla BashNo ratings yet
- DC MACH - Chapter 5Document53 pagesDC MACH - Chapter 5marryjohnopalla05No ratings yet
- De La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorDocument6 pagesDe La Salle University Dasmarinas: Experiment No. 4 DC Shunt MotorMizhar GerardoNo ratings yet
- 3.b. D.C. Motors: Construction and Working of DC Motor ElectricalDocument5 pages3.b. D.C. Motors: Construction and Working of DC Motor ElectricalJB 1922No ratings yet
- Objective: Fig 1. Left Hand RuleDocument11 pagesObjective: Fig 1. Left Hand RuleShahir Afif IslamNo ratings yet
- Single Phase Induction MotorsDocument19 pagesSingle Phase Induction MotorsRahulGundeNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- KPIsDocument5 pagesKPIssiddiq85No ratings yet
- Emico NoteDocument1 pageEmico Notesiddiq85No ratings yet
- Bill For Repaired Turn TableDocument1 pageBill For Repaired Turn Tablesiddiq85No ratings yet
- 662 Time Pin StudyDocument2 pages662 Time Pin Studysiddiq85No ratings yet
- Bill For Repaired Turn TableDocument1 pageBill For Repaired Turn Tablesiddiq85No ratings yet
- Unit 3: Introduction To DC Generator (Part 2)Document14 pagesUnit 3: Introduction To DC Generator (Part 2)idasyarmilaNo ratings yet
- Merus A2 Module User Manual 3.1 PDFDocument110 pagesMerus A2 Module User Manual 3.1 PDFFawad NoorNo ratings yet
- Powerscreen Premiertrak 400 Technical Specification Rev 8 01 01 2017 PDFDocument14 pagesPowerscreen Premiertrak 400 Technical Specification Rev 8 01 01 2017 PDFSanjay KumarNo ratings yet
- Archimod HE Tender Threephase 80kW enDocument14 pagesArchimod HE Tender Threephase 80kW enMuhammad Qumar NazeerNo ratings yet
- Product Knowledge Training Materials For Cable ArmoringDocument21 pagesProduct Knowledge Training Materials For Cable ArmoringYomna SamiNo ratings yet
- Schneider (1000A) Bus DuctDocument342 pagesSchneider (1000A) Bus DuctOliver HermosaNo ratings yet
- Battery Analyser 7200 User ManualDocument11 pagesBattery Analyser 7200 User ManualBùi Xuân ĐứcNo ratings yet
- w18765 Manual Cat 390fDocument50 pagesw18765 Manual Cat 390fMartin Carhuaz Acuna100% (1)
- GBH 2 Power Plus: Operating InstructionsDocument11 pagesGBH 2 Power Plus: Operating InstructionsMhd Ismail PanutNo ratings yet
- Volt - and Ammeters W. Switch Data Sheet 4921210077 UK PDFDocument3 pagesVolt - and Ammeters W. Switch Data Sheet 4921210077 UK PDFEdwin QuispeNo ratings yet
- Closing SIS - Step-by-Step Guide to Test Transmission Clutch PressuresDocument6 pagesClosing SIS - Step-by-Step Guide to Test Transmission Clutch PressuresCarlos IrabedraNo ratings yet
- Evfuel PurifinerDocument2 pagesEvfuel Purifinerapi-525617690No ratings yet
- Modular Electronic Devices - 2015Document156 pagesModular Electronic Devices - 2015Razvan FarcasNo ratings yet
- Split Case Fire Pumps: Fairbanks NijhuisDocument24 pagesSplit Case Fire Pumps: Fairbanks NijhuisRUDYNIZAMANo ratings yet
- Battery Sizing CalculationDocument11 pagesBattery Sizing CalculationZulfiker Heider83% (6)
- ClarifierDocument2 pagesClarifierchagar_harshNo ratings yet
- Partes ST1030Document903 pagesPartes ST1030Jerson MieresNo ratings yet
- Curiculum Vitae - Doc 2Document3 pagesCuriculum Vitae - Doc 2rodlabaclado3231100% (2)
- Max7-Neo7 Him (Ubx-13003704)Document51 pagesMax7-Neo7 Him (Ubx-13003704)jaychenonlyNo ratings yet
- UPS III Loop Calibrator Measures and Sources 0-24 mADocument4 pagesUPS III Loop Calibrator Measures and Sources 0-24 mAbugoff700No ratings yet
- Haldex InformationDocument8 pagesHaldex InformationFernando PadillaNo ratings yet
- United PerformanceDocument285 pagesUnited PerformanceSkynnerNo ratings yet
- Stolces J. 70 Years of Radio Tubes and Valves 2ed 1997 - Part1Document20 pagesStolces J. 70 Years of Radio Tubes and Valves 2ed 1997 - Part1Anonymous 60esBJZIjNo ratings yet
- SWP-24 Piling Operation DaimanDocument4 pagesSWP-24 Piling Operation DaimanHassan AbdullahNo ratings yet
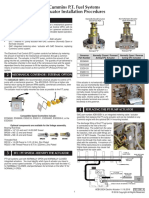
- PIB1006 - A Cummins PT Fuel SystemDocument2 pagesPIB1006 - A Cummins PT Fuel SystemMauricio Guanella80% (5)
- Ul 1261 BulletinDocument14 pagesUl 1261 BulletinMboriko MwashaNo ratings yet
- Automate de Aprindere Honeywell S 4565 S4575 S4585 - Pliant Date TehniceDocument66 pagesAutomate de Aprindere Honeywell S 4565 S4575 S4585 - Pliant Date TehniceAl ZanoagaNo ratings yet
- CD Fe Iii 001 V20 enDocument13 pagesCD Fe Iii 001 V20 enOmar AlhadyNo ratings yet
- Appliedmembranes - Pressure Vessels PDFDocument18 pagesAppliedmembranes - Pressure Vessels PDFalfredo guzmanNo ratings yet
- Blood Collection Mixer: User'S ManualDocument28 pagesBlood Collection Mixer: User'S ManualFredy7878No ratings yet
- 2N3440 STM TransistorDocument4 pages2N3440 STM TransistortotaliseNo ratings yet