You might also like
- ENGL301 An Introduction To Literary Criticism and TheoryDocument3 pagesENGL301 An Introduction To Literary Criticism and Theorydinho91No ratings yet
- JamesonDocument9 pagesJamesonfanzefirlNo ratings yet
- Checkhov PlatonovDocument9 pagesCheckhov PlatonovfanzefirlNo ratings yet
- Kaminskij 231509Document15 pagesKaminskij 231509fanzefirlNo ratings yet
- Media 192656 enDocument5 pagesMedia 192656 enfanzefirlNo ratings yet
- 2011-12 Skakov - Ekphrastic Metaphysics of Dzhan - UlbandusDocument17 pages2011-12 Skakov - Ekphrastic Metaphysics of Dzhan - UlbandusfanzefirlNo ratings yet
- 0f40ace6c8cc1bf27033e62a0d5a2e27Document231 pages0f40ace6c8cc1bf27033e62a0d5a2e27fanzefirlNo ratings yet
- Roman IngardenDocument5 pagesRoman IngardenfanzefirlNo ratings yet
- B. S Grotesque Sample PDFDocument30 pagesB. S Grotesque Sample PDFCristina MandoiuNo ratings yet
- The Politics of Inclusive Agreements: Towards A Critical Discourse Theory of DemocracyDocument19 pagesThe Politics of Inclusive Agreements: Towards A Critical Discourse Theory of DemocracyfanzefirlNo ratings yet
- 8673 1 SMDocument32 pages8673 1 SMfanzefirlNo ratings yet
- Gen 2v18-25 OTE 2010Document22 pagesGen 2v18-25 OTE 2010fanzefirlNo ratings yet
- Roman Ingarden's Theory of Intentional Musical WorkDocument11 pagesRoman Ingarden's Theory of Intentional Musical WorkAnna-Maria ZachNo ratings yet
- Dolls HouseDocument19 pagesDolls HousefanzefirlNo ratings yet
- Semiotics - Vol1.No1.NazarovaDocument9 pagesSemiotics - Vol1.No1.Nazarovaradugeorge11No ratings yet
- Feminist Performance Criticism1Document25 pagesFeminist Performance Criticism1fanzefirlNo ratings yet
- Feminist Research: Debbie Kralik and Antonia M. Van LoonDocument10 pagesFeminist Research: Debbie Kralik and Antonia M. Van LoonfanzefirlNo ratings yet
- Deleuze, Whitehead, and The Truth of Badiou PDFDocument46 pagesDeleuze, Whitehead, and The Truth of Badiou PDFChristos PapasNo ratings yet
- Resource List of PakistanDocument59 pagesResource List of PakistanShahpoor Khan WazirNo ratings yet
- Sustainable Livelihood Approach: A Critical Analysis of Theory and PracticeDocument68 pagesSustainable Livelihood Approach: A Critical Analysis of Theory and PracticefanzefirlNo ratings yet
- Simpkins - Derrida and SemioticsDocument12 pagesSimpkins - Derrida and SemioticskwsxNo ratings yet
- 978 1 4438 0499 8 SampleDocument30 pages978 1 4438 0499 8 SamplefanzefirlNo ratings yet
- SemioticsDocument8 pagesSemioticsfanzefirlNo ratings yet
- Guide For Legislators 3.30.15Document13 pagesGuide For Legislators 3.30.15fanzefirlNo ratings yet
- SemioticsDocument8 pagesSemioticsfanzefirlNo ratings yet
- Aesthetics of EncounterDocument16 pagesAesthetics of EncounterfanzefirlNo ratings yet
- CH 1Document26 pagesCH 1fanzefirlNo ratings yet
- Kaminskij 231509Document15 pagesKaminskij 231509fanzefirlNo ratings yet
- NLR 30302Document3 pagesNLR 30302fanzefirlNo ratings yet
- 2011-12 Skakov - Ekphrastic Metaphysics of Dzhan - UlbandusDocument17 pages2011-12 Skakov - Ekphrastic Metaphysics of Dzhan - UlbandusfanzefirlNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Chapter 5 (Student)Document27 pagesChapter 5 (Student)Muhammad Zarif IshakNo ratings yet
- المرشد العلاجي لالتهاب الانف التحسسيDocument43 pagesالمرشد العلاجي لالتهاب الانف التحسسيyasinoNo ratings yet
- General Strain TheoryDocument2 pagesGeneral Strain TheoryArmin ValdezNo ratings yet
- Paper Summary - The Quest To Replace Passwords: A Framework For Comparative Evaluation of Web Authentication SchemesDocument1 pagePaper Summary - The Quest To Replace Passwords: A Framework For Comparative Evaluation of Web Authentication SchemesTanmay SrivastavNo ratings yet
- Robinson v. Baltimore & Ohio R. Co., 222 U.S. 506 (1912)Document5 pagesRobinson v. Baltimore & Ohio R. Co., 222 U.S. 506 (1912)Scribd Government DocsNo ratings yet
- RECTO MEMORIAL NATIONAL HIGH SCHOOL Social Sciences ProfessionsDocument11 pagesRECTO MEMORIAL NATIONAL HIGH SCHOOL Social Sciences ProfessionsVince BurceNo ratings yet
- Modeling CO2 Capture via Chemical Absorption Processes Literature ReviewDocument21 pagesModeling CO2 Capture via Chemical Absorption Processes Literature ReviewRene QuisNo ratings yet
- Cheese Comes Up Many Times in The Bible LWML DevotionDocument1 pageCheese Comes Up Many Times in The Bible LWML Devotionnathan_yamahaNo ratings yet
- OS Lab RecordDocument96 pagesOS Lab RecordPrawinNo ratings yet
- ITC Strategic Implementation GuideDocument13 pagesITC Strategic Implementation GuidePranav Goyal100% (1)
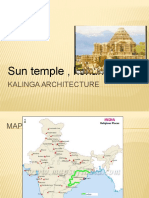
- Konark Sun Temple, a 13th century architectural marvelDocument18 pagesKonark Sun Temple, a 13th century architectural marvelSyed Ahmed KabeerNo ratings yet
- Dse Fact Sheet 2 Dse 0Document4 pagesDse Fact Sheet 2 Dse 0Laura Caitlin HughesNo ratings yet
- Petitioner vs. vs. Respondents Rodriguez D. Dadivas Orlanda Bigcas-LumawagDocument24 pagesPetitioner vs. vs. Respondents Rodriguez D. Dadivas Orlanda Bigcas-LumawagCarol TerradoNo ratings yet
- Customer Satisfaction Survey at Café Coffee DayDocument39 pagesCustomer Satisfaction Survey at Café Coffee DayRahul Gollamudi25% (4)
- Life of BuddhaDocument53 pagesLife of BuddhaPrashant SrivastavaNo ratings yet
- Swami Hariharananda's Vision of Kriya YogaDocument103 pagesSwami Hariharananda's Vision of Kriya YogaOrn-uma DaumNo ratings yet
- 5 Manipulation Techniques Inspired by Johan LiebertDocument12 pages5 Manipulation Techniques Inspired by Johan LiebertKiyotaka AyanokojiNo ratings yet
- Itu-T G.691Document48 pagesItu-T G.691Walter JerezanoNo ratings yet
- 12 Years A Slave LitChartDocument52 pages12 Years A Slave LitChartNobody Important100% (1)
- Total Quality Management For The Hotel Industry and TourismDocument14 pagesTotal Quality Management For The Hotel Industry and TourismMohd Yousuf MasoodNo ratings yet
- Larvicidal Activity of Some Saponin Containing Plants Against The Dengue Vector Aedes Aegypti.Document11 pagesLarvicidal Activity of Some Saponin Containing Plants Against The Dengue Vector Aedes Aegypti.Dr. Jawale Chetan S.100% (1)
- Post Graduate Diploma in International Trade PgditDocument13 pagesPost Graduate Diploma in International Trade PgditNeekhar SinhaNo ratings yet
- How I Created The Theory of RelativityDocument4 pagesHow I Created The Theory of RelativityEric TseNo ratings yet
- Cloned Question Muet Writng Task 2Document2 pagesCloned Question Muet Writng Task 2Nur Adnin TalibNo ratings yet
- Distraction Techniques Reduce Pain in Children During Medical ProceduresDocument7 pagesDistraction Techniques Reduce Pain in Children During Medical ProceduresTuti NingsihNo ratings yet
- Unit 2 - 1Document19 pagesUnit 2 - 1dollyNo ratings yet
- Baking CookiesDocument2 pagesBaking Cookiesapi-541744798No ratings yet
- Reflection Paper About Locomotor and Non-Locomotor MovementsDocument1 pageReflection Paper About Locomotor and Non-Locomotor MovementsanaryNo ratings yet
- Basic Electical Engineering ModelsDocument2 pagesBasic Electical Engineering ModelsChandrakanth GummadiNo ratings yet
- Opici Lecture 16 PDFDocument3 pagesOpici Lecture 16 PDFMingu JeongNo ratings yet