You might also like
- Embedded Systems Design Course - Modular design and programming techniquesDocument32 pagesEmbedded Systems Design Course - Modular design and programming techniquesPancho BerríosNo ratings yet
- Mbed BK Ed2 CH 6Document18 pagesMbed BK Ed2 CH 6Pedro Augusto PeresNo ratings yet
- EdSim51 - Example ProgramsDocument12 pagesEdSim51 - Example ProgramserwanblogNo ratings yet
- 8051Document39 pages8051Vaishali GajjarNo ratings yet
- Lunch Box Switch - Seven Segment Display (CC and CA) : Lab Activity - 7Document7 pagesLunch Box Switch - Seven Segment Display (CC and CA) : Lab Activity - 7Vaibhav GoelNo ratings yet
- LAB 3 - Verilog For Combinatorial Circuits: GoalsDocument7 pagesLAB 3 - Verilog For Combinatorial Circuits: GoalsJoey WangNo ratings yet
- Modifications: Before Modification After Modification Set - Tris - B (0x7F) Pin - b7Document7 pagesModifications: Before Modification After Modification Set - Tris - B (0x7F) Pin - b7Ammar AlkindyNo ratings yet
- FPGA Design Flow & Experiment 1Document5 pagesFPGA Design Flow & Experiment 1Faid MuzahidNo ratings yet
- Embedded Lab ReprtDocument56 pagesEmbedded Lab ReprtHarsh KulshresthaNo ratings yet
- Lab1 - Seven Segment DisplayDocument9 pagesLab1 - Seven Segment DisplayJaime BarraganNo ratings yet
- 4 Digits 7 Segment Display ENGDocument16 pages4 Digits 7 Segment Display ENGC R.No ratings yet
- dsPIC Microcontroller PDFDocument19 pagesdsPIC Microcontroller PDFSỹ RonNo ratings yet
- LED and Button Control with 8051 MicrocontrollerDocument16 pagesLED and Button Control with 8051 MicrocontrollerAkbar AkbarNo ratings yet
- Logic Circuits and Switching Theory (Laboratory Manual)Document103 pagesLogic Circuits and Switching Theory (Laboratory Manual)Faye Yturralde50% (2)
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 7Document16 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 7Tomás BurónNo ratings yet
- 05 Laboratory Exercise 5full-PermissionDocument10 pages05 Laboratory Exercise 5full-PermissionDomsNo ratings yet
- Lab 02Document14 pagesLab 02Bodour MohamedNo ratings yet
- C167 Programming ToolsDocument11 pagesC167 Programming ToolscmchristoNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - C - 10Document18 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - C - 10Tomás BurónNo ratings yet
- Using C++ for microcontrollers: benefits and challengesDocument14 pagesUsing C++ for microcontrollers: benefits and challengesTruong Phong TuyenNo ratings yet
- C Programming 01Document22 pagesC Programming 01Brijesh NaikNo ratings yet
- 7-Segment Display Interfacing and Programming - Embedded Club 4 UDocument8 pages7-Segment Display Interfacing and Programming - Embedded Club 4 UManish Kumar VermaNo ratings yet
- CG Labmanual CGDocument25 pagesCG Labmanual CGSami U. KhanNo ratings yet
- Interfacing Seven Segment Displays With AVRDocument8 pagesInterfacing Seven Segment Displays With AVRTufulNo ratings yet
- Rabadon - Exercise3 FullAdderDocument13 pagesRabadon - Exercise3 FullAdderChristian RabadonNo ratings yet
- Microprocessors and Microcontrollers Lab ReportDocument80 pagesMicroprocessors and Microcontrollers Lab ReportLiving LovesNo ratings yet
- Laboratory Manual 2016 EditionDocument1 pageLaboratory Manual 2016 Editionア ムNo ratings yet
- Seven SegDocument21 pagesSeven SegHendrick SebastianNo ratings yet
- Job14 ARM Nuvoton NUC140 SevenSegment Dan KeypadDocument5 pagesJob14 ARM Nuvoton NUC140 SevenSegment Dan KeypadMuhamad SalimNo ratings yet
- Verilog Interview QuestionsDocument39 pagesVerilog Interview Questionskvxrw7201No ratings yet
- Infineon-LED7SEG - User - Module-Software Module Datasheets-V01 - 02-ENDocument13 pagesInfineon-LED7SEG - User - Module-Software Module Datasheets-V01 - 02-ENAsrulNo ratings yet
- Ex - No 7 Interfacing-Seven-Segment-DisplayDocument7 pagesEx - No 7 Interfacing-Seven-Segment-DisplaytdsuresheeeNo ratings yet
- DWMC - Lecture2 8051 Programming (ESD 606)Document33 pagesDWMC - Lecture2 8051 Programming (ESD 606)sreenathpnNo ratings yet
- INTERVIEW QUESTIONS - Verilog - PART-1Document9 pagesINTERVIEW QUESTIONS - Verilog - PART-1charan tejaNo ratings yet
- Lab 2 - 7 Segment Display and Analog InputsDocument27 pagesLab 2 - 7 Segment Display and Analog Inputsroger david pimienta barrosNo ratings yet
- Lab 7Document9 pagesLab 7zaqNo ratings yet
- Ard1 - Using 7-Segment and PWMDocument8 pagesArd1 - Using 7-Segment and PWMaliNo ratings yet
- Cone With Color Projection REPORTDocument28 pagesCone With Color Projection REPORTpruthvi kumarNo ratings yet
- 1-Microcontroller Based System Design - CompleteDocument55 pages1-Microcontroller Based System Design - CompleteWasif Bin ArifNo ratings yet
- Lab 03Document9 pagesLab 03daniyal2k23No ratings yet
- ECEN 248 Lab7 - ReportDocument9 pagesECEN 248 Lab7 - ReportRebecca Sontheimer100% (1)
- Arduino and 7 Segment LEDDocument5 pagesArduino and 7 Segment LEDAnonymous h2VaB0No ratings yet
- Enel3dsh1 Lab1 PDFDocument5 pagesEnel3dsh1 Lab1 PDFNdumiso MtshaliNo ratings yet
- Ard1 - Using 7-Segment and PWMDocument8 pagesArd1 - Using 7-Segment and PWMAhmed SajidNo ratings yet
- OpenGL and SDLDocument3 pagesOpenGL and SDLsurface995No ratings yet
- Lab 5Document8 pagesLab 5robertoNo ratings yet
- C Programming on ArduinoDocument17 pagesC Programming on ArduinoNick RecordNo ratings yet
- Lecture Programming MicrocontrollersDocument22 pagesLecture Programming MicrocontrollersHectorLopezNo ratings yet
- 6th Sem CG ManualDocument74 pages6th Sem CG Manualfathima parveenNo ratings yet
- Arduino 101 - Basics of Programming in ArduinoDocument8 pagesArduino 101 - Basics of Programming in ArduinoshujanNo ratings yet
- ED Curs 06 07 Q1 1BT4 Control MI-8Document2 pagesED Curs 06 07 Q1 1BT4 Control MI-8Michel MoacirNo ratings yet
- Lab 3Document6 pagesLab 3anonymous bunnyNo ratings yet
- Debug GDB Guide Under 40 CharactersDocument9 pagesDebug GDB Guide Under 40 Charactersvkbadal01No ratings yet
- Lec 2 Introduction of OpenGLDocument34 pagesLec 2 Introduction of OpenGLSalman MalikNo ratings yet
- Unregistered Word to PDF Converter Coding LCD Hello World ProgramDocument3 pagesUnregistered Word to PDF Converter Coding LCD Hello World Programkailashv91No ratings yet
- Welcome To Pico Sensor Kit Repository: Segment7.pyDocument7 pagesWelcome To Pico Sensor Kit Repository: Segment7.pyDarwin VargasNo ratings yet
- Welcome To Pico Sensor Kit Repository: Segment7.pyDocument7 pagesWelcome To Pico Sensor Kit Repository: Segment7.pyDarwin VargasNo ratings yet
- Enhancing System Verilog - AOPDocument3 pagesEnhancing System Verilog - AOPNagarjuna UduthaNo ratings yet
- Programming Fundamentals Practical ReportDocument24 pagesProgramming Fundamentals Practical ReportSarahmei MeiNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Odoo JavascriptDocument120 pagesOdoo JavascriptMahmoud Naguib100% (1)
- 5-10542 Viper 100 DatasheetDocument9 pages5-10542 Viper 100 DatasheetMahmoud NaguibNo ratings yet
- Konfigurasi LCDDocument4 pagesKonfigurasi LCDAndwi Putra NugrahaNo ratings yet
- VLSIDocument7 pagesVLSIMahmoud NaguibNo ratings yet
- Root Finding AlgorithmDocument5 pagesRoot Finding AlgorithmMahmoud NaguibNo ratings yet
- Booting ARM Linux: Vincent SandersDocument22 pagesBooting ARM Linux: Vincent SandersMahmoud NaguibNo ratings yet
- Specifications: Customer Mass Production Code SPF-N260QV1R37-S38Document22 pagesSpecifications: Customer Mass Production Code SPF-N260QV1R37-S38Mahmoud NaguibNo ratings yet
- r61526 SpecDocument22 pagesr61526 SpecMahmoud NaguibNo ratings yet
- TFT LCDDocument30 pagesTFT LCDMahmoud NaguibNo ratings yet
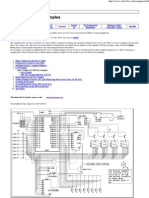
- Hardware Examples Part 1Document2 pagesHardware Examples Part 1Mahmoud NaguibNo ratings yet
- Himax HX8352 SpecDocument161 pagesHimax HX8352 SpecMahmoud NaguibNo ratings yet
- Chapter 8 - Power Density Spectrum: EE420/500 Class Notes 7/27/2011 John StensbyDocument18 pagesChapter 8 - Power Density Spectrum: EE420/500 Class Notes 7/27/2011 John StensbyMahmoud NaguibNo ratings yet
- Controllability and ObservabilityDocument6 pagesControllability and ObservabilityMahmoud NaguibNo ratings yet
- Hardware Examples Part 2Document1 pageHardware Examples Part 2Mahmoud NaguibNo ratings yet
- Does The Inertia of A Body DependDocument3 pagesDoes The Inertia of A Body Dependapi-3771959No ratings yet
- DFTDocument106 pagesDFTBhatt JaydeepNo ratings yet
- Fermat Last Theorem ProofDocument140 pagesFermat Last Theorem ProofAhmed Samir100% (1)
- Jordan's Proof of The Jordan Curve TheoremDocument16 pagesJordan's Proof of The Jordan Curve TheoremMahmoud NaguibNo ratings yet
- Single PhotonDocument6 pagesSingle PhotonMahmoud NaguibNo ratings yet
- 03.08010804 V Sahaded AntennaDocument10 pages03.08010804 V Sahaded AntennaMahmoud NaguibNo ratings yet
- Solution Path Integral I H Duru 1979Document4 pagesSolution Path Integral I H Duru 1979Husnu AksakalNo ratings yet
- Access Control Lists (Acls)Document16 pagesAccess Control Lists (Acls)Khalid ArdahNo ratings yet
- Blackbody RadiationDocument16 pagesBlackbody RadiationMahmoud NaguibNo ratings yet
- Fourier TransformDocument7 pagesFourier TransformMahmoud NaguibNo ratings yet
- Tensor AlgebraDocument16 pagesTensor AlgebraBoules AtefNo ratings yet
- Solution Path Integral I H Duru 1979Document4 pagesSolution Path Integral I H Duru 1979Husnu AksakalNo ratings yet
- 11 Appendix BoltzmannDocument9 pages11 Appendix BoltzmannMahmoud NaguibNo ratings yet
- Combinations of Multisets: September 17, 2008Document2 pagesCombinations of Multisets: September 17, 2008Mahmoud NaguibNo ratings yet
- ElementsofQuaternions 10632581Document616 pagesElementsofQuaternions 10632581Bodan NedNo ratings yet
- B276-B277 PSGDocument33 pagesB276-B277 PSGDarwin HernandezNo ratings yet
- Emd 1Document277 pagesEmd 1shaikh wajed khalilNo ratings yet
- CNC Programming Examples Lathe MachiningDocument2 pagesCNC Programming Examples Lathe MachiningchandruNo ratings yet
- Varitel c2000 Man EngDocument630 pagesVaritel c2000 Man EngclaudiotamecubaNo ratings yet
- Advanced MBSD - NotesDocument737 pagesAdvanced MBSD - NotesTom KigeziNo ratings yet
- DM542 English VersionDocument4 pagesDM542 English VersionGiuliano Alves SantanaNo ratings yet
- KC - June2020 - NetBeat User ManualDocument20 pagesKC - June2020 - NetBeat User ManualSergio Alejandro Ovalle CamposNo ratings yet
- DC-DC Converters - Lecture Notes Tutorial Problems PDFDocument23 pagesDC-DC Converters - Lecture Notes Tutorial Problems PDFvipul50% (6)
- FUJI FRENIC Mega Manual PDFDocument287 pagesFUJI FRENIC Mega Manual PDFAli Fajar100% (1)
- How To Add Hard Disk As CacheDocument6 pagesHow To Add Hard Disk As CacheGary John Managbanag YuNo ratings yet
- SCADA Open Source SolutionsDocument10 pagesSCADA Open Source SolutionsbelopezpNo ratings yet
- Keetec TS100Document2 pagesKeetec TS100Solzaru EugenNo ratings yet
- A New Family of Sensors For Pulse OximetryDocument22 pagesA New Family of Sensors For Pulse OximetryEmilio CánepaNo ratings yet
- Using The GP-3500 With DEIF SystemsDocument10 pagesUsing The GP-3500 With DEIF Systemsvirgil guimanNo ratings yet
- 02 Student Placement Report Thursday 11 2019 O.H.T.-iiDocument978 pages02 Student Placement Report Thursday 11 2019 O.H.T.-iiAll SidesNo ratings yet
- Basic Knowledge of Discrete Semiconductor Device - Toshiba Electronic Devices & Storage Corporation - Asia-EnglishDocument10 pagesBasic Knowledge of Discrete Semiconductor Device - Toshiba Electronic Devices & Storage Corporation - Asia-EnglishReetipragya SinghNo ratings yet
- 2 - The Current State of ICT TechnologiesDocument85 pages2 - The Current State of ICT TechnologiesPrincerhianne DecemnbranaNo ratings yet
- Lab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterDocument6 pagesLab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterSadil BatafNo ratings yet
- MPLS Fundamentals ExplainedDocument52 pagesMPLS Fundamentals ExplainedBon Tran HongNo ratings yet
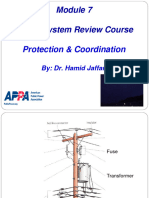
- Protection & Coordination by - Dr. Hamid JaffariDocument83 pagesProtection & Coordination by - Dr. Hamid JaffariMuhammad HusnainNo ratings yet
- Cache Analysis Using CACTIDocument4 pagesCache Analysis Using CACTIMuhammad Arif SaidNo ratings yet
- Industrial Sliding Gate GearmotorsDocument11 pagesIndustrial Sliding Gate GearmotorsVictor Catril MatamalaNo ratings yet
- Service Manual: Skyworth RGB R&D Centre Technical DocumentDocument32 pagesService Manual: Skyworth RGB R&D Centre Technical DocumentlalgalleNo ratings yet
- Uni LogDocument2 pagesUni LogAmit Singh ChouhanNo ratings yet
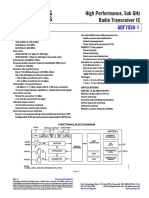
- Adf7030 1 PDFDocument55 pagesAdf7030 1 PDFFarid AhmadNo ratings yet
- SP 377 Manual Deserv I CosDocument184 pagesSP 377 Manual Deserv I CosDawood AhmedNo ratings yet
- q615 Electrical Electronics and Control EngineeringDocument36 pagesq615 Electrical Electronics and Control Engineeringjustooln2No ratings yet
- DS100S AC Servo Drive ManualDocument23 pagesDS100S AC Servo Drive ManualJuan Francisco Sanchez MassadiNo ratings yet
- GE CIC Pro Service Manual Clinical Info Center MP100 v511 2011Document312 pagesGE CIC Pro Service Manual Clinical Info Center MP100 v511 2011Usman GhaniNo ratings yet