You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Transmission Network Expansion Planning Considering Repowering and ReconfiguratioDocument9 pagesTransmission Network Expansion Planning Considering Repowering and Reconfiguratiosumitverma1990No ratings yet
- Iet-Gtd 2015 1555Document14 pagesIet-Gtd 2015 1555sumitverma1990No ratings yet
- Multi-Objective Based Congestion Management Using Generation Rescheduling and Load SheddingDocument12 pagesMulti-Objective Based Congestion Management Using Generation Rescheduling and Load Sheddingsumitverma1990No ratings yet
- Transmission Network Expansion Planning Considering Repowering and ReconfiguratioDocument9 pagesTransmission Network Expansion Planning Considering Repowering and Reconfiguratiosumitverma1990No ratings yet
- Transmission Network Expansion Planning Considering Repowering and ReconfiguratioDocument9 pagesTransmission Network Expansion Planning Considering Repowering and Reconfiguratiosumitverma1990No ratings yet
- Thu KaramDocument11 pagesThu KaramSumit VermaNo ratings yet
- Renewable Energy Sources and Responsive Demand. Do We Need Congestion Management in The Distribution Grid?Document10 pagesRenewable Energy Sources and Responsive Demand. Do We Need Congestion Management in The Distribution Grid?sumitverma1990No ratings yet
- GK For Sbi Po Exam 2013Document410 pagesGK For Sbi Po Exam 2013sumitverma1990No ratings yet
- 04 3 1-Es-GaDocument55 pages04 3 1-Es-Gasumitverma1990No ratings yet
- Line Protection UnitDocument6 pagesLine Protection Unitsumitverma1990No ratings yet
- IcwaiDocument7 pagesIcwaisumitverma1990No ratings yet
- Simulation and Optimization of Automatic Generation Control Under DeregulationDocument29 pagesSimulation and Optimization of Automatic Generation Control Under Deregulationsumitverma1990No ratings yet
- A Manual For Preparation of Project ReportDocument9 pagesA Manual For Preparation of Project ReportJeyasri R VigneshNo ratings yet
- Synopsis On Home Appliance Control Through Pc/internetDocument5 pagesSynopsis On Home Appliance Control Through Pc/internetsumitverma1990No ratings yet
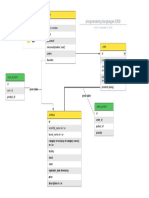
- Programming Languages ERDDocument1 pageProgramming Languages ERDkosaialbonniNo ratings yet
- T05 3-4 2 PDFDocument201 pagesT05 3-4 2 PDFKhyss Ziah HerscheNo ratings yet
- Inview message and variable triggeringDocument2 pagesInview message and variable triggeringGabriel David Paez CamposNo ratings yet
- Strategical Analysis of NCR WIFI by Kedari KiranDocument18 pagesStrategical Analysis of NCR WIFI by Kedari KirankedarikiranNo ratings yet
- NCKU Compiler 2021 Assignment 1 PagedDocument6 pagesNCKU Compiler 2021 Assignment 1 PagedArthue1316No ratings yet
- Cluster Could Not StartDocument4 pagesCluster Could Not StartMartaSekulicNo ratings yet
- SSH Key Generation ReferenceDocument6 pagesSSH Key Generation ReferenceBabjee ReddyNo ratings yet
- Android Ranch ProgrammingDocument69 pagesAndroid Ranch ProgrammingReg Nullify100% (2)
- 312 50 DemoDocument9 pages312 50 DemoTomasVileikisNo ratings yet
- LTO and CPR ProcessingDocument2 pagesLTO and CPR Processingverkie100% (9)
- DMC Card 00180020430723Document2 pagesDMC Card 00180020430723jotu sheelaNo ratings yet
- Tugas WiresharkDocument12 pagesTugas WiresharkImam SadiliNo ratings yet
- Assignment - ACCESSDocument19 pagesAssignment - ACCESSTeyhaNo ratings yet
- Dell Emc Poweredge R640: Installation and Service ManualDocument173 pagesDell Emc Poweredge R640: Installation and Service ManualangevilessNo ratings yet
- Michael W Hughes 2020 RESUME CVDocument4 pagesMichael W Hughes 2020 RESUME CVrecruiterkkNo ratings yet
- MM 30Document40 pagesMM 30PRIYORANJAN DE100% (2)
- Script MafiaDocument2 pagesScript MafiaHassan FethiNo ratings yet
- SAP CRM 7.0 For Newbies (Part 1) Simple BOL Object Creation For CRM Webclient UIDocument9 pagesSAP CRM 7.0 For Newbies (Part 1) Simple BOL Object Creation For CRM Webclient UIMehmet Onur MutluNo ratings yet
- FxExtractor OperationDocument6 pagesFxExtractor OperationMirevStefanNo ratings yet
- Compiler Design: Hoor FatimaDocument19 pagesCompiler Design: Hoor FatimaHoor FatimaNo ratings yet
- Apple Identity Guidelines: For Channel Affiliates and Apple-Certified IndividualsDocument64 pagesApple Identity Guidelines: For Channel Affiliates and Apple-Certified IndividualsZahid RizvyNo ratings yet
- 8760Document5 pages8760VinNo ratings yet
- Example Curriculum VitaeDocument4 pagesExample Curriculum VitaeGugun NugrahaNo ratings yet
- Oracle Silent InstallDocument5 pagesOracle Silent InstallAnuj SinghNo ratings yet
- NavCad PWD Module NA Jul-Aug 14Document1 pageNavCad PWD Module NA Jul-Aug 14theleepiper8830No ratings yet
- Oracle APSDocument13 pagesOracle APSAnindita Nath100% (1)
- P442 CortecDocument6 pagesP442 CortecHari Krishna.MNo ratings yet
- r05321204 Data Warehousing and Data MiningDocument5 pagesr05321204 Data Warehousing and Data MiningSRINIVASA RAO GANTANo ratings yet
- HRMS Comparison GuideDocument160 pagesHRMS Comparison GuideSudheer Reddy ReddypalliNo ratings yet
- Dhanasimmaraja Subramani - Page 1Document3 pagesDhanasimmaraja Subramani - Page 1mukthesh9No ratings yet