You might also like
- Digital Design and Synthesis: Fall 09Document45 pagesDigital Design and Synthesis: Fall 09songoku711No ratings yet
- An Freq MeasurementDocument14 pagesAn Freq MeasurementfarcasiunNo ratings yet
- Vectors, Arrays, System Tasks: TopicDocument30 pagesVectors, Arrays, System Tasks: TopicEffecure HealthcareNo ratings yet
- NDSU Timer2 Interrupt ExampleDocument11 pagesNDSU Timer2 Interrupt ExampleCesar Matos100% (2)
- Timeunit and Timeprecision in SystemVerilogDocument3 pagesTimeunit and Timeprecision in SystemVerilogDan Kumar YadavNo ratings yet
- Testbench For Full Adder in Verilog: Timescale 1ns / 1psDocument5 pagesTestbench For Full Adder in Verilog: Timescale 1ns / 1pspalanyrockNo ratings yet
- Understanding Safety Engineering and Failure AnalysisDocument76 pagesUnderstanding Safety Engineering and Failure AnalysisWilly K. Ng'etich100% (2)
- Tips For Simulation Debug PDFDocument21 pagesTips For Simulation Debug PDFSaurin Shah100% (1)
- Computer Network Experiments at Indore Institute of Science & TechnologyDocument35 pagesComputer Network Experiments at Indore Institute of Science & TechnologyDivyansh DixitNo ratings yet
- FlexCAN bit timing ParametersDocument8 pagesFlexCAN bit timing Parametersravillakiran56No ratings yet
- Lab2 2022FDocument36 pagesLab2 2022FlokeshNo ratings yet
- Debugging Techniques for Mixed-Signal AMS SimulationsDocument28 pagesDebugging Techniques for Mixed-Signal AMS SimulationsarunsrlNo ratings yet
- MEC3015 2012 Filters Tutorial 1Document3 pagesMEC3015 2012 Filters Tutorial 1AliMalikNo ratings yet
- Chapter 6-TestbenchDocument107 pagesChapter 6-Testbenchelle868No ratings yet
- Exp 10 Transient Stability AnalysisDocument6 pagesExp 10 Transient Stability AnalysisPuduru BharathiNo ratings yet
- 16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerDocument12 pages16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerLauderi MartinsNo ratings yet
- lab2Document42 pageslab2nguyen minh giangNo ratings yet
- EE 461 Experiment #1 Digital Control of DC Servomotor: 1 ObjectivesDocument5 pagesEE 461 Experiment #1 Digital Control of DC Servomotor: 1 ObjectivesTancho IndraNo ratings yet
- 7SJ50x CatalogueDocument10 pages7SJ50x CatalogueManuel López Villaseñor100% (2)
- 2010 12 PotM Distance Protection IEC 60255 121 IPTS 2010 PDFDocument8 pages2010 12 PotM Distance Protection IEC 60255 121 IPTS 2010 PDFreza515heiNo ratings yet
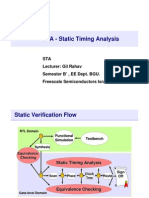
- Sta 9 1Document125 pagesSta 9 1Jayaprakash Polimetla100% (1)
- Setup and Use The AVR® TimersDocument16 pagesSetup and Use The AVR® Timersmike_helplineNo ratings yet
- Special Event Trigger For PIC32 by Bruce MisnerDocument3 pagesSpecial Event Trigger For PIC32 by Bruce MisnerPaquito Rodríguez RodillaNo ratings yet
- ATPG Methodology for Detecting Manufacturing DefectsDocument37 pagesATPG Methodology for Detecting Manufacturing DefectsaanbalanNo ratings yet
- Lab2 2017Document37 pagesLab2 2017ashokalan2038No ratings yet
- Goddard ConsultingDocument4 pagesGoddard ConsultingssuthaaNo ratings yet
- Circular Waveguide Microwave Engineering ProjectDocument19 pagesCircular Waveguide Microwave Engineering ProjectGouse ModeenNo ratings yet
- Section 8.3: Finite-Horizon and Infinite-Horizon Statistics: Discrete-Event Simulation: A First CourseDocument20 pagesSection 8.3: Finite-Horizon and Infinite-Horizon Statistics: Discrete-Event Simulation: A First CoursessfofoNo ratings yet
- VLSI Lab 9Document33 pagesVLSI Lab 9Umar AyubNo ratings yet
- Recommended Operations: 1. Detrend ACDocument5 pagesRecommended Operations: 1. Detrend ACPradeep TongepatilNo ratings yet
- Codigo MatlabDocument19 pagesCodigo MatlabVictor ManuelNo ratings yet
- The Quality of Approximation Algorithms Implemented in The Flow Line Planning Software Floweval - Numerical ResultsDocument18 pagesThe Quality of Approximation Algorithms Implemented in The Flow Line Planning Software Floweval - Numerical Resultsوديع المخلافيNo ratings yet
- Timer Interrupts: Here Arduino Due Forum PostDocument7 pagesTimer Interrupts: Here Arduino Due Forum PostAlbert DeluqueNo ratings yet
- Technical Proficiency Andtraining-1 Vlsi: Minor Project-1 On PWM Generator With Variable Duty CycleDocument18 pagesTechnical Proficiency Andtraining-1 Vlsi: Minor Project-1 On PWM Generator With Variable Duty CycleRam MNo ratings yet
- Akaroa OmnetDocument8 pagesAkaroa OmnetArie WirawanNo ratings yet
- Simulation Pace: DescriptionDocument4 pagesSimulation Pace: DescriptionEmmanuelNo ratings yet
- Damping SystemDocument6 pagesDamping SystemEro DoppleganggerNo ratings yet
- VLSI Stopwatch Chip Project ReportDocument40 pagesVLSI Stopwatch Chip Project ReportMani SinghNo ratings yet
- Lecture 02-Amdahl's Law, Modern Hardware: ECE 459: Programming For PerformanceDocument13 pagesLecture 02-Amdahl's Law, Modern Hardware: ECE 459: Programming For PerformancemirionNo ratings yet
- Digital Clock Frequency Multiplier Using Floating Point ArithmeticDocument4 pagesDigital Clock Frequency Multiplier Using Floating Point ArithmeticIJERDNo ratings yet
- Configuring Transient AnalysisDocument4 pagesConfiguring Transient AnalysisariasnomercyNo ratings yet
- Microcontroller Tutorial Ii Timers: What Is A Timer?Document13 pagesMicrocontroller Tutorial Ii Timers: What Is A Timer?Ting Chee SiongNo ratings yet
- DVCon Europe 2015 TA5 1 PaperDocument7 pagesDVCon Europe 2015 TA5 1 PaperJon DCNo ratings yet
- EC 6512 CS Lab ManualDocument58 pagesEC 6512 CS Lab ManualPraveen Kumar33% (6)
- Alstom Micom p546 v80 Line PTT User Manual EnuDocument7 pagesAlstom Micom p546 v80 Line PTT User Manual EnuAbib LeyeNo ratings yet
- Tutorial Sol CH 11Document3 pagesTutorial Sol CH 11Abraham wisdomNo ratings yet
- Co-Ordination of Over Current Relays in Distribution SystemDocument36 pagesCo-Ordination of Over Current Relays in Distribution SystemSiva P100% (1)
- U Tune (Micro Lite)Document8 pagesU Tune (Micro Lite)Laurence MalanumNo ratings yet
- Ensayo 2.c.9.b QTGDocument4 pagesEnsayo 2.c.9.b QTGJuan Ignacio CamarottiNo ratings yet
- Project 2nd 1Document11 pagesProject 2nd 1datdrakuNo ratings yet
- Swerleins AlgorithmDocument14 pagesSwerleins AlgorithmnomeNo ratings yet
- GSM Parameters ValuesDocument9 pagesGSM Parameters ValuesArjun AslekarNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Numerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityFrom EverandNumerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- LMD 100 Financial Profile 1 SWDocument1 pageLMD 100 Financial Profile 1 SWindula123No ratings yet
- Heli Cal - Com Coupling SelectorDocument3 pagesHeli Cal - Com Coupling Selectorindula123No ratings yet
- Reports From Maintenance Excellence Data BaseDocument3 pagesReports From Maintenance Excellence Data Baseindula123No ratings yet
- PmuDocument5 pagesPmuindula123No ratings yet
- A Teaching Tool For Phasor Measurement Estimation: December, 2013 Daniel DottaDocument47 pagesA Teaching Tool For Phasor Measurement Estimation: December, 2013 Daniel Dottaindula123No ratings yet
- Fundamentals of Preventive Maintenance Schedule Definition With Oracle EAMDocument21 pagesFundamentals of Preventive Maintenance Schedule Definition With Oracle EAMindula123No ratings yet
- Oracle EAM GuideDocument9 pagesOracle EAM Guideindula123No ratings yet
- ) vs. Inverter Frequency (F) : B) 1. Motor Speed (NDocument7 pages) vs. Inverter Frequency (F) : B) 1. Motor Speed (Nindula123No ratings yet
- State Space ModellingDocument19 pagesState Space Modellingindula123No ratings yet
- Guide For Matlab & PSCADDocument3 pagesGuide For Matlab & PSCADmehrdad132No ratings yet
- IM Group AssignmentDocument2 pagesIM Group Assignmentindula123No ratings yet
- PJST10 1 75Document7 pagesPJST10 1 75indula123No ratings yet
- Basic Statistics 2014Document6 pagesBasic Statistics 2014indula123No ratings yet
- Synchrophasor Measurements Under The IEEE Standard C37-118!1!2011 With Amendment C37-118-1aDocument9 pagesSynchrophasor Measurements Under The IEEE Standard C37-118!1!2011 With Amendment C37-118-1aindula123No ratings yet
- Computation of Phasor From Discrete Fourier Transform: S. A. Soman Department of Electrical Engineering, IIT BombayDocument17 pagesComputation of Phasor From Discrete Fourier Transform: S. A. Soman Department of Electrical Engineering, IIT Bombayindula123No ratings yet
- SIMkt TOC2012Document5 pagesSIMkt TOC2012indula123No ratings yet
- Simulation of Phasor Measurement Unit in MATLABDocument4 pagesSimulation of Phasor Measurement Unit in MATLABindula123No ratings yet
- Online Reload Receipt DetailsDocument1 pageOnline Reload Receipt Detailsindula123No ratings yet
- Anatomy of PeppersDocument8 pagesAnatomy of Peppersindula123No ratings yet
- Vector BookDocument10 pagesVector Bookindula123No ratings yet
- Cahier 178Document31 pagesCahier 178Heri Tri SetiawanNo ratings yet
- Design of Efficient Induction MotorsDocument43 pagesDesign of Efficient Induction MotorsVivek Pawar83% (6)
- Elr Tzs Ad Operation Manual KRB 5206 12Document4 pagesElr Tzs Ad Operation Manual KRB 5206 12indula123100% (2)
- Vacancies Available For The Year 2014 (Student Preferences)Document90 pagesVacancies Available For The Year 2014 (Student Preferences)indula123No ratings yet
- 4 Layers of Aloe Vera LeafDocument1 page4 Layers of Aloe Vera Leafindula123No ratings yet
- Class interactive assignments report submission guidelinesDocument3 pagesClass interactive assignments report submission guidelinesindula123No ratings yet
- Four Parts of Aloe LeafDocument1 pageFour Parts of Aloe Leafindula123No ratings yet
- MA3023 Maths MidDocument1 pageMA3023 Maths Midindula123No ratings yet
- Numerical Methods For Differential EquationsDocument25 pagesNumerical Methods For Differential EquationsblankleftNo ratings yet
- Growatt 8000tl3 S ManualDocument30 pagesGrowatt 8000tl3 S Manualletuananh122No ratings yet
- Cap 8 PDFDocument6 pagesCap 8 PDFmo02jum0% (1)
- Manual de Utilizare Sina Smart Pentru Jaluzele Verticale Orvibo W13W14Document19 pagesManual de Utilizare Sina Smart Pentru Jaluzele Verticale Orvibo W13W14matryzamNo ratings yet
- HP Sales Central: HP 240 G8 Notebook PC (365K4PA)Document10 pagesHP Sales Central: HP 240 G8 Notebook PC (365K4PA)yudi risnandarNo ratings yet
- SA XH300GS Diagrama Fuente 12654Document2 pagesSA XH300GS Diagrama Fuente 12654Eisenhower Garcia LealNo ratings yet
- Graphic Recorder - GR200 SeriesDocument4 pagesGraphic Recorder - GR200 Seriesrolando ojedaNo ratings yet
- Choose The Right Data Converter For Your ApplicationDocument78 pagesChoose The Right Data Converter For Your ApplicationAnonymous 3mJfZENo ratings yet
- Thyristor Switch ApplicationsDocument7 pagesThyristor Switch ApplicationsPathum SudasingheNo ratings yet
- A 3.0GHz 13.8GHz Ultra-Wideband Planar Monopole Micro Strip Antenna. Proceedings of 2014 3rd Asia-Pacific Conference On Antennas and Propagation PDFDocument3 pagesA 3.0GHz 13.8GHz Ultra-Wideband Planar Monopole Micro Strip Antenna. Proceedings of 2014 3rd Asia-Pacific Conference On Antennas and Propagation PDFNiko RohadiNo ratings yet
- Como Abrir All in One HP o Compaq18 All-in-One PCDocument13 pagesComo Abrir All in One HP o Compaq18 All-in-One PCAdrian Parada AlexNo ratings yet
- Training - Battery-Based-PV-Systems-with-OutBack-Power PDFDocument97 pagesTraining - Battery-Based-PV-Systems-with-OutBack-Power PDFsudarman007No ratings yet
- TCP IpDocument64 pagesTCP IpMohamed ShabanaNo ratings yet
- Project ReportDocument67 pagesProject ReportNithyasri ANo ratings yet
- Servo Cn1 - Chân Để Hàn - CncDocument1 pageServo Cn1 - Chân Để Hàn - CncTrí ChốtNo ratings yet
- AISnet Quick Start Guide V1 - 00 - EngDocument5 pagesAISnet Quick Start Guide V1 - 00 - EngDavor GiaconiNo ratings yet
- Emergency Cloud System: Jesse Alexander, WB2IFS/3 Prince George's County ARES/RACES, Clinton Cert, SkywarnDocument25 pagesEmergency Cloud System: Jesse Alexander, WB2IFS/3 Prince George's County ARES/RACES, Clinton Cert, SkywarnMike HammondsNo ratings yet
- Cadence MixerDocument118 pagesCadence MixerVăn Công100% (1)
- BJT vs FET: Comparing key differences between bipolar junction transistors and field effect transistorsDocument1 pageBJT vs FET: Comparing key differences between bipolar junction transistors and field effect transistorsfrinzyNo ratings yet
- Everyday Practical Electronics - 2005.03Document74 pagesEveryday Practical Electronics - 2005.03István BoldogNo ratings yet
- 01 LTE TDD ERAN11.1 Optional Feature Description 02 (20160730)Document225 pages01 LTE TDD ERAN11.1 Optional Feature Description 02 (20160730)Mohammed Al Mandhari100% (1)
- Zap Pica ToreDocument1 pageZap Pica TorechicanahenoNo ratings yet
- Replace GP3000H To GP4000H eDocument9 pagesReplace GP3000H To GP4000H eToshni-Tek Tech Support RajeshNo ratings yet
- Assignment PDFDocument2 pagesAssignment PDFTAPAS KUMAR MAJINo ratings yet
- Library Sound Level Meter: September 2013Document11 pagesLibrary Sound Level Meter: September 2013Sophie VillanuevaNo ratings yet
- Power Electronics and Motor Drives - (The Industrial Electronics Handbook) Bogdan M. Wilamowski, J. David IrwinDocument8 pagesPower Electronics and Motor Drives - (The Industrial Electronics Handbook) Bogdan M. Wilamowski, J. David IrwinTrustWorthy100No ratings yet
- GHF - S of TT - Technical CurriculumDocument65 pagesGHF - S of TT - Technical CurriculumDxmplesNo ratings yet
- Malfunction in Speedometer: Wiring DiagramDocument4 pagesMalfunction in Speedometer: Wiring DiagramJustin LeoNo ratings yet
- Section 8: Inter-RAT Handover: Single Radio Voice Call Continuity (SRVCC)Document19 pagesSection 8: Inter-RAT Handover: Single Radio Voice Call Continuity (SRVCC)Aseem Rajpal100% (2)
- ksc1008 TV SamsungDocument4 pagesksc1008 TV Samsungjavier venturaNo ratings yet