You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Electronic Installations and Service-Parts Manual PDFDocument745 pagesElectronic Installations and Service-Parts Manual PDFmastrangelo2973100% (3)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- MPD A350v1 - R01 - I00Document341 pagesMPD A350v1 - R01 - I00budiaero100% (4)
- C172 Skyhawk SP Maneuvers ManualDocument30 pagesC172 Skyhawk SP Maneuvers Manualkoolkk4uNo ratings yet
- Potla AssignDocument9 pagesPotla AssignAman GauravNo ratings yet
- Homogeneous Model - Typical Application: On Applying Homogeneous Model For Flow With Phase ChangeDocument4 pagesHomogeneous Model - Typical Application: On Applying Homogeneous Model For Flow With Phase ChangeAman GauravNo ratings yet
- Assignment 1Document14 pagesAssignment 1Aman GauravNo ratings yet
- Introduction and Basics of RC HelicopterDocument7 pagesIntroduction and Basics of RC HelicopterAman GauravNo ratings yet
- Basic Principles of TurbomachinesDocument85 pagesBasic Principles of TurbomachinesAhmed Adel IbrahimNo ratings yet
- Faa CT 8080 4e PDFDocument2 pagesFaa CT 8080 4e PDFDavidNo ratings yet
- Minimum Cost and Weight Design of Fuselage Frames Part A: Design Constraints and Manufacturing Process CharacteristicsDocument8 pagesMinimum Cost and Weight Design of Fuselage Frames Part A: Design Constraints and Manufacturing Process CharacteristicsArmando VasquezNo ratings yet
- Wind Turbine Control Upgrades AssessmentDocument14 pagesWind Turbine Control Upgrades Assessmentmersad uzunovicNo ratings yet
- 050663X XZM Indus GB (11-01)Document4 pages050663X XZM Indus GB (11-01)Felipe Morales AliagaNo ratings yet
- Splash 1Document4 pagesSplash 1seafire47100% (1)
- AluminiumDocument16 pagesAluminiumVigneswaranNo ratings yet
- P92 Flight Manual OverviewDocument65 pagesP92 Flight Manual OverviewFaras AlsaidNo ratings yet
- Earth-to-Mars Mission Design (Fortran)Document50 pagesEarth-to-Mars Mission Design (Fortran)Anonymous REw1YIq4q7No ratings yet
- Aw 3363 Data SheetDocument1 pageAw 3363 Data SheetElego13thNo ratings yet
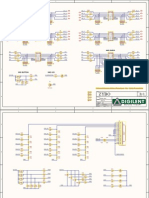
- PG 3 ZYBO - SCHDocument13 pagesPG 3 ZYBO - SCHanuptonemeNo ratings yet
- Aircraft Design Project - 150 Seater Passenger AircraftDocument118 pagesAircraft Design Project - 150 Seater Passenger Aircraftsonusingh786775% (12)
- DIBP RFT 38 17 - Attachment A - SOR - ABF Air Charter ProcurementDocument14 pagesDIBP RFT 38 17 - Attachment A - SOR - ABF Air Charter ProcurementAnonymous o3sgjPKNo ratings yet
- Design of Apache HelicopterDocument19 pagesDesign of Apache HelicopterMed PadilNo ratings yet
- Ali 2018Document6 pagesAli 2018rosendo rojas barraganNo ratings yet
- ANANYA-PTFE Coatings, Teflon Coating, Halar Coating, Xylan Coating Services, Corrosion Resistant Coatings, Non Stick CoatingDocument40 pagesANANYA-PTFE Coatings, Teflon Coating, Halar Coating, Xylan Coating Services, Corrosion Resistant Coatings, Non Stick CoatingAnanya CoatingsNo ratings yet
- Power Supply Networks For The Airport LED Lights Systems: Radim BloudicekDocument5 pagesPower Supply Networks For The Airport LED Lights Systems: Radim BloudicekKadek Ita RosianaNo ratings yet
- FREE FLIGHT RESOURCE LIST VENDORS, PUBLICATIONS, WEBSITESDocument6 pagesFREE FLIGHT RESOURCE LIST VENDORS, PUBLICATIONS, WEBSITESsuttipong_polmagNo ratings yet
- TCDS EASA R509 LHD AW169 Issue 14Document14 pagesTCDS EASA R509 LHD AW169 Issue 14Mike MotariNo ratings yet
- AD List for Saab 340 AircraftDocument8 pagesAD List for Saab 340 AircraftJorge Ignacio Lara CeballosNo ratings yet
- AOT Traffic Report-2019Document183 pagesAOT Traffic Report-2019Egsiam SaotonglangNo ratings yet
- Aviation English & Aviation Weather PresentationDocument12 pagesAviation English & Aviation Weather PresentationAhsan AfzaalNo ratings yet
- Durham Fluent Tutorial GuideDocument6 pagesDurham Fluent Tutorial GuidenavidelecNo ratings yet
- Beechcraft B200 parts catalogDocument890 pagesBeechcraft B200 parts catalogCarlos Andres Oviedo OsorioNo ratings yet
- 27 Flight ControlsDocument6 pages27 Flight ControlsAhmed Abdoul ZaherNo ratings yet
- Primary Foam Tender (PFT)Document7 pagesPrimary Foam Tender (PFT)rmaffireschoolNo ratings yet
- Types of Stress On ShipsDocument4 pagesTypes of Stress On Shipssumedhb21No ratings yet