You might also like
- JQ2015 Chiu LoDocument15 pagesJQ2015 Chiu LofawadazeemqaisraniNo ratings yet
- Renewable Energy TechnologiesDocument74 pagesRenewable Energy TechnologiesfawadazeemqaisraniNo ratings yet
- Jççéääáåöi Páãìä Íáçåi Åç Méêñçêã Ååé Å Äóëáë ÇÑ Eóäêáç Mçïéê Póëíéã Ñçê Jçäáäé Jéçáå Ä 'Äáåáå David Arap Cheruiyot CherusDocument98 pagesJççéääáåöi Páãìä Íáçåi Åç Méêñçêã Ååé Å Äóëáë ÇÑ Eóäêáç Mçïéê Póëíéã Ñçê Jçäáäé Jéçáå Ä 'Äáåáå David Arap Cheruiyot CherusfawadazeemqaisraniNo ratings yet
- Chapter 24 PDFDocument38 pagesChapter 24 PDFRayyan SalmanNo ratings yet
- Power Transmission, Distribution and UtilizationDocument12 pagesPower Transmission, Distribution and UtilizationfawadazeemqaisraniNo ratings yet
- Alternative Energy - An Overview - v3Document44 pagesAlternative Energy - An Overview - v3Kenny SiludNo ratings yet
- EnMS Manual For LAs FINALDocument67 pagesEnMS Manual For LAs FINALvino280286No ratings yet
- BS/BSC (B.tech Hons) Engineering Technology New Curriculum 2015-2016Document179 pagesBS/BSC (B.tech Hons) Engineering Technology New Curriculum 2015-2016EngrEjazURRehmanNo ratings yet
- Basic Control Systems EngineeringDocument457 pagesBasic Control Systems EngineeringBinh Le Khac82% (17)
- APEN Multiapartament Microgrid 2015-LibreDocument13 pagesAPEN Multiapartament Microgrid 2015-LibrefawadazeemqaisraniNo ratings yet
- Design and Economy of Renewable Energy Sources To SupplyDocument4 pagesDesign and Economy of Renewable Energy Sources To SupplyfawadazeemqaisraniNo ratings yet
- Micro-Grid Simulation During Grid-Connected and Islanded Modes of OperationDocument6 pagesMicro-Grid Simulation During Grid-Connected and Islanded Modes of OperationNguyễn Đức NguyệnNo ratings yet
- Analysis of Power Converters Control Techniques in Grid-Tie andDocument142 pagesAnalysis of Power Converters Control Techniques in Grid-Tie andfawadazeemqaisraniNo ratings yet
- 1 J 2017Document13 pages1 J 2017fawadazeemqaisraniNo ratings yet
- Ref 11effect of Environmental Parameters On The Water Solubility of The Polycyclic Aromatic Hydrocarbons and Derivatives Using Taguchi Experimental Design MethodologyDocument4 pagesRef 11effect of Environmental Parameters On The Water Solubility of The Polycyclic Aromatic Hydrocarbons and Derivatives Using Taguchi Experimental Design MethodologyfawadazeemqaisraniNo ratings yet
- Analysis of Power Converters Control Techniques in Grid-Tie andDocument142 pagesAnalysis of Power Converters Control Techniques in Grid-Tie andfawadazeemqaisraniNo ratings yet
- Evaluation of Heat Loss Coefficients in SolarDocument5 pagesEvaluation of Heat Loss Coefficients in SolarEdson ViniciusNo ratings yet
- Journal of Power SourcesDocument10 pagesJournal of Power SourcesfawadazeemqaisraniNo ratings yet
- Paper Related To BiofuelsDocument19 pagesPaper Related To BiofuelsfawadazeemqaisraniNo ratings yet
- 1 s2.0 S1364032113006370 MainDocument16 pages1 s2.0 S1364032113006370 MainKarthik KumarNo ratings yet
- Frequenz Online Brochure en Final 2Document51 pagesFrequenz Online Brochure en Final 2lisusedNo ratings yet
- Paper Related To BiofuelDocument5 pagesPaper Related To BiofuelfawadazeemqaisraniNo ratings yet
- Flat Plate Solar SystemDocument4 pagesFlat Plate Solar SystemRD1_LNVNo ratings yet
- Financial and Operating Performance of Privatized Firms A Case Study of Pakistan PDFDocument27 pagesFinancial and Operating Performance of Privatized Firms A Case Study of Pakistan PDFfawadazeemqaisraniNo ratings yet
- Electric Vehicles PaperDocument9 pagesElectric Vehicles PaperfawadazeemqaisraniNo ratings yet
- So Sanh CSI Voi VSIDocument8 pagesSo Sanh CSI Voi VSIRen Hong GiangNo ratings yet
- Frequenz Online Brochure en Final 2Document51 pagesFrequenz Online Brochure en Final 2lisusedNo ratings yet
- Electric Vehicles PaperDocument9 pagesElectric Vehicles PaperfawadazeemqaisraniNo ratings yet
- Microgrid Testbeds Around the World: A Review of Distributed Energy SystemsDocument22 pagesMicrogrid Testbeds Around the World: A Review of Distributed Energy SystemsfawadazeemqaisraniNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Design of RRM WallDocument2 pagesDesign of RRM WallchapiuNo ratings yet
- 2S Solar Private Limited Connects Remote Areas with Solar EnergyDocument26 pages2S Solar Private Limited Connects Remote Areas with Solar Energyvishwajeet narayananNo ratings yet
- Vibration Isolation PDFDocument9 pagesVibration Isolation PDFl8o8r8d8s8i8v8No ratings yet
- AC DC Power SupplyDocument26 pagesAC DC Power SupplyNathaniel RogeroNo ratings yet
- 60 Questions Basic Physics Paul G HewittDocument9 pages60 Questions Basic Physics Paul G Hewittraphael bellezaNo ratings yet
- Tnpsc Group 2 Force and Pressure Study MaterialsDocument7 pagesTnpsc Group 2 Force and Pressure Study MaterialsanbuNo ratings yet
- 11kV Test Procedure (OG-630A, IC-2000A, BB-2000A)Document6 pages11kV Test Procedure (OG-630A, IC-2000A, BB-2000A)Bandaru Ananth NaiduNo ratings yet
- PV Inverter Catalogue20180802Document29 pagesPV Inverter Catalogue20180802SathishNo ratings yet
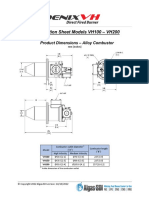
- Spec Sheet PN 57001 Phoenix VH VH100 VH200 3 1Document4 pagesSpec Sheet PN 57001 Phoenix VH VH100 VH200 3 1Jona RochaNo ratings yet
- Heat Transfer Final ExamDocument10 pagesHeat Transfer Final ExamAssignment HelpNo ratings yet
- Rotational Dynamics and Static EquilibriumDocument11 pagesRotational Dynamics and Static EquilibriumnoriNo ratings yet
- JET-2022 Electrical Sample Paper: - DomainDocument4 pagesJET-2022 Electrical Sample Paper: - DomainVIKASH KUMAR SINGHNo ratings yet
- Internship Report 28 PDF FreeDocument45 pagesInternship Report 28 PDF FreeMuhammad Talha ShahidNo ratings yet
- Sigma Procedure - RTDDocument15 pagesSigma Procedure - RTDFarhan IftakharNo ratings yet
- APTRANSCO - APGENCO Assistant Engineer AE Electrical Previous Question Papers - Indian ShoutDocument10 pagesAPTRANSCO - APGENCO Assistant Engineer AE Electrical Previous Question Papers - Indian ShoutumamaheshwarraoNo ratings yet
- Pflex At001 - en PDocument76 pagesPflex At001 - en Pvenky4025No ratings yet
- Refrigerated Room ProblemsDocument10 pagesRefrigerated Room ProblemsChesterJerichoRamosNo ratings yet
- 03 - Chapter 4Document12 pages03 - Chapter 4Sahiel HaripersadNo ratings yet
- HVAC System Design Report Master DocumentDocument7 pagesHVAC System Design Report Master DocumentHisham MustafaNo ratings yet
- Vd09-Vd12-Axitub Piros Winder 48-800t-6 2.8 KW - UkDocument2 pagesVd09-Vd12-Axitub Piros Winder 48-800t-6 2.8 KW - UkConstantin294No ratings yet
- Chapter 3 - Fall2015 PDFDocument41 pagesChapter 3 - Fall2015 PDFPhạm Ngọc ThạchNo ratings yet
- Drying 1-1Document96 pagesDrying 1-1Sameer SharmaNo ratings yet
- Mitsubishi v500 VFD Instruction ManualDocument119 pagesMitsubishi v500 VFD Instruction ManualMROstop.com100% (1)
- Higher Voltage Capacitance Becomes Increasingly ImportantDocument2 pagesHigher Voltage Capacitance Becomes Increasingly ImportantdevrajNo ratings yet
- Effects of Transmission Filters and Color Spectrums on Photoelectric Stopping PotentialsDocument6 pagesEffects of Transmission Filters and Color Spectrums on Photoelectric Stopping PotentialsAnwar Husen SadiliNo ratings yet
- Question Paper For Internal Assessment Examination (Theory) - Credit 4 / 45Document6 pagesQuestion Paper For Internal Assessment Examination (Theory) - Credit 4 / 45Garkal AjinkyaNo ratings yet
- Experiment 16: Heat ConductionDocument6 pagesExperiment 16: Heat Conductiontuan nguyenNo ratings yet
- 6SL3220-3YE46-0AF0 - Datasheet - en SiemensDocument3 pages6SL3220-3YE46-0AF0 - Datasheet - en Siemensbernardo ospinaNo ratings yet
- XS - 25000 Manual Low UK ENDocument8 pagesXS - 25000 Manual Low UK ENflireousNo ratings yet
- 33 KV Cable Transmission Line Technical SpesificationDocument10 pages33 KV Cable Transmission Line Technical SpesificationNima dawa SherpaNo ratings yet