You might also like
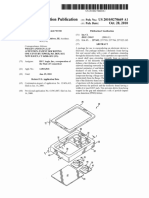
- Us20100013084a1 - Surface Mount Package With High Thermal ConductivityDocument13 pagesUs20100013084a1 - Surface Mount Package With High Thermal ConductivityNosfe Matingli DiazNo ratings yet
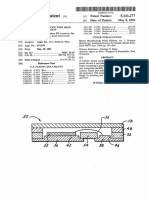
- Us5111277 - Surface Mount Device With High Thermal ConductivityDocument7 pagesUs5111277 - Surface Mount Device With High Thermal ConductivityNosfe Matingli DiazNo ratings yet
- Ceramic Sidewall Surface Mount Package Improves Thermal ConductivityDocument13 pagesCeramic Sidewall Surface Mount Package Improves Thermal ConductivityNosfe Matingli DiazNo ratings yet
- H00002007-HexagonMI-RDS User Manual-V5.4.1.202 enDocument216 pagesH00002007-HexagonMI-RDS User Manual-V5.4.1.202 enNosfe Matingli Diaz100% (1)
- Surface Roughness Scale Conversion ChartDocument1 pageSurface Roughness Scale Conversion ChartNosfe Matingli DiazNo ratings yet
- Us6111198 - Duplex Feedthrough and Method ThereforDocument9 pagesUs6111198 - Duplex Feedthrough and Method ThereforNosfe Matingli DiazNo ratings yet
- Awcb 178 NfdatasheetDocument18 pagesAwcb 178 NfdatasheetNosfe Matingli DiazNo ratings yet
- Surface Roughness Conversion2Document1 pageSurface Roughness Conversion2Nosfe Matingli DiazNo ratings yet
- Energy Conversion-Based Nanotherapy For Rheumatoid Arthritis TreatmentDocument16 pagesEnergy Conversion-Based Nanotherapy For Rheumatoid Arthritis TreatmentNosfe Matingli DiazNo ratings yet
- RDS Data Collector: User ManualDocument149 pagesRDS Data Collector: User ManualNosfe Matingli DiazNo ratings yet
- Cut-Offs and The Measurement of Surface Roughness PDFDocument8 pagesCut-Offs and The Measurement of Surface Roughness PDFLOGANATHAN VNo ratings yet
- Cut-Offs and The Measurement of Surface Roughness PDFDocument8 pagesCut-Offs and The Measurement of Surface Roughness PDFLOGANATHAN VNo ratings yet
- ME0403 Ch2 Gear MeasurementDocument42 pagesME0403 Ch2 Gear MeasurementMANOJ M100% (1)
- Job List Hoja BlancaDocument4 pagesJob List Hoja BlancaNosfe Matingli DiazNo ratings yet
- BioRes - 10 - 4 - 7618 - Gaff - Effect - Selected - Parameters - Surface Waviness - Milling - Birch - 7644Document9 pagesBioRes - 10 - 4 - 7618 - Gaff - Effect - Selected - Parameters - Surface Waviness - Milling - Birch - 7644Nosfe Matingli DiazNo ratings yet
- Poetry Series Highlights Indian Culture and TraditionsDocument536 pagesPoetry Series Highlights Indian Culture and TraditionsNosfe Matingli DiazNo ratings yet
- Pc-Dmis 2017 r1 NistDocument5 pagesPc-Dmis 2017 r1 NistNosfe Matingli DiazNo ratings yet
- FARO TechDocument7 pagesFARO TechNosfe Matingli DiazNo ratings yet
- Chukwuemeke Bright 2016 31Document4 pagesChukwuemeke Bright 2016 31Nosfe Matingli DiazNo ratings yet
- Engineering Information: Spur Gears Gear NomenclatureDocument18 pagesEngineering Information: Spur Gears Gear NomenclatureShamologNo ratings yet
- Lubinda Lubinda 2016 34Document126 pagesLubinda Lubinda 2016 34Nosfe Matingli DiazNo ratings yet
- Gear Guide PDFDocument89 pagesGear Guide PDFDicedudeNo ratings yet
- Farzad Jahanbani 2016 45Document80 pagesFarzad Jahanbani 2016 45Nosfe Matingli DiazNo ratings yet
- Mtemi Dedan - Poems - : Poetry SeriesDocument35 pagesMtemi Dedan - Poems - : Poetry SeriesNosfe Matingli DiazNo ratings yet
- Farzad Jahanbani 2016 45Document80 pagesFarzad Jahanbani 2016 45Nosfe Matingli DiazNo ratings yet
- Poetry Series Publication by Warren FalconDocument903 pagesPoetry Series Publication by Warren FalconNosfe Matingli DiazNo ratings yet
- Dean William Johnston 2016 11Document237 pagesDean William Johnston 2016 11Nosfe Matingli DiazNo ratings yet
- David Lacey 2016 23Document726 pagesDavid Lacey 2016 23Nosfe Matingli DiazNo ratings yet
- Poetry Series Highlights Indian Culture and TraditionsDocument536 pagesPoetry Series Highlights Indian Culture and TraditionsNosfe Matingli DiazNo ratings yet
- Kim Hilliker 2016 37Document32 pagesKim Hilliker 2016 37Nosfe Matingli DiazNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- C146-94a (2014) Standard Test Methods For Chemical Analysis of Glass SandDocument12 pagesC146-94a (2014) Standard Test Methods For Chemical Analysis of Glass SandAhmed AlzubaidiNo ratings yet
- Laboratory Activity No. 01 - Properties of LiquidDocument2 pagesLaboratory Activity No. 01 - Properties of LiquidCzarina Relleve0% (1)
- Port Ps PDFDocument2 pagesPort Ps PDFluisNo ratings yet
- TAURI User ManualDocument23 pagesTAURI User ManualChris Sad LHNo ratings yet
- Mapping of Significant Natural Resources: Category: Bodies of WaterDocument3 pagesMapping of Significant Natural Resources: Category: Bodies of WaterDei HernandezNo ratings yet
- Four Ball EPDocument5 pagesFour Ball EPu4sachinNo ratings yet
- PSP StompFilter Operation ManualDocument26 pagesPSP StompFilter Operation ManualMoving BackwardsNo ratings yet
- CE QB - All Units PDFDocument38 pagesCE QB - All Units PDFkurian georgeNo ratings yet
- Organizational Structure and ProfilesDocument178 pagesOrganizational Structure and ProfilesImran Khan NiaziNo ratings yet
- Catalogo Novik NeoDocument32 pagesCatalogo Novik NeorafaelciceliniNo ratings yet
- Process Strategy PPT at BEC DOMSDocument68 pagesProcess Strategy PPT at BEC DOMSBabasab Patil (Karrisatte)100% (1)
- Hydrocarbon TechnologyDocument21 pagesHydrocarbon Technologyghatak2100% (1)
- Lesson Plan in Science 10 2nd QuarterDocument5 pagesLesson Plan in Science 10 2nd QuarterJenevev81% (21)
- Safety Steering System Alarm Code GuideDocument43 pagesSafety Steering System Alarm Code GuideIsrael Michaud84% (19)
- Fc6a Plus (MQTT)Document44 pagesFc6a Plus (MQTT)black boxNo ratings yet
- Management Science BUMA 20103 Module New PDFDocument290 pagesManagement Science BUMA 20103 Module New PDFLee TeukNo ratings yet
- Harvard Referencing ManualDocument31 pagesHarvard Referencing ManualАлина ЛовицкаяNo ratings yet
- Atuador Ip67Document6 pagesAtuador Ip67Wellington SoaresNo ratings yet
- Grade-3-DLL MATHEMATICS-3 Q1 W4Document3 pagesGrade-3-DLL MATHEMATICS-3 Q1 W4Jonathan Corveau IgayaNo ratings yet
- Quicksort and Heapsort Algorithms ExplainedDocument41 pagesQuicksort and Heapsort Algorithms ExplainedRahul SaxenaNo ratings yet
- Educ 61 Module 5 ActivityDocument4 pagesEduc 61 Module 5 ActivityMitchille GetizoNo ratings yet
- VUCG Guia de Instalacion y Comisionamiento en Ingles 1ZSC000562-AAY en Rev 1 - LowDocument56 pagesVUCG Guia de Instalacion y Comisionamiento en Ingles 1ZSC000562-AAY en Rev 1 - Lowarmandoa71565No ratings yet
- Module 1 SIMPLE INTERESTDocument15 pagesModule 1 SIMPLE INTERESTElle Villanueva VlogNo ratings yet
- i-PROTECTOR SPPR Catalogue 1.0Document2 pagesi-PROTECTOR SPPR Catalogue 1.0Sureddi KumarNo ratings yet
- Timecode and SourcesDocument4 pagesTimecode and Sourcesapi-483055750No ratings yet
- ISO/TC 46/SC 9/working Group 1Document4 pagesISO/TC 46/SC 9/working Group 1João Paulo CésarNo ratings yet
- Chemistry: Crash Course For JEE Main 2020Document17 pagesChemistry: Crash Course For JEE Main 2020QSQFNo ratings yet
- Quiz 2 ReviewDocument17 pagesQuiz 2 ReviewabubakkarNo ratings yet
- Trip WireDocument19 pagesTrip Wirepinky065558100% (2)
- Simulation and Performance of Double Gate Finfet Devices: B.Sethupathy, P.Aruna PriyaDocument3 pagesSimulation and Performance of Double Gate Finfet Devices: B.Sethupathy, P.Aruna PriyaKrisumraj PurkaitNo ratings yet