You might also like
- HGLRC F4 V5PRO Manual - High-Performance All-in-One Racing Drone FCDocument12 pagesHGLRC F4 V5PRO Manual - High-Performance All-in-One Racing Drone FCGobardhan Pudasaini100% (1)
- The Quad Copter ControllerDocument11 pagesThe Quad Copter ControllerAdam MahmoodNo ratings yet
- Crius AIOP V2 0 Guide For MegaPirateNG Ver 1 0Document43 pagesCrius AIOP V2 0 Guide For MegaPirateNG Ver 1 0FlyeerNo ratings yet
- Electrodes/ADS1298 Interface: ResolvedDocument10 pagesElectrodes/ADS1298 Interface: ResolvedSummer MamunNo ratings yet
- H2 Production Detailed ReviewDocument6 pagesH2 Production Detailed ReviewJaydeep PatelNo ratings yet
- Inside The Power SupplyDocument41 pagesInside The Power SupplyBright UzzalNo ratings yet
- SMPS Test SeduleDocument6 pagesSMPS Test SeduledeeruNo ratings yet
- Texas Instruments. Testing A Form of SMPSDocument7 pagesTexas Instruments. Testing A Form of SMPSRoger FairchildNo ratings yet
- Simple Distillation of Cyclohexane and Toluene MixtureDocument18 pagesSimple Distillation of Cyclohexane and Toluene MixtureAnonymous xfzNyyi4No ratings yet
- Gazi Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği'nde Resonant KonvertörlerDocument41 pagesGazi Üniversitesi Mühendislik Fakültesi Elektrik Elektronik Mühendisliği'nde Resonant Konvertörlerkazemy_gNo ratings yet
- Elecs 1 - Diode CircuitsDocument103 pagesElecs 1 - Diode CircuitsAnthony CortezNo ratings yet
- AN4105 Power Switching ICDocument23 pagesAN4105 Power Switching ICatomo33100% (1)
- A Manual On Freecad (An Open Source Software)Document42 pagesA Manual On Freecad (An Open Source Software)Dr.Krishna BhowalNo ratings yet
- Syngas Preparation: CH4 + H2 O CO + 3H2Document4 pagesSyngas Preparation: CH4 + H2 O CO + 3H2Gopal AgarwalNo ratings yet
- Physics Grade 10 Physics Ch3 Motion in One DimensionDocument68 pagesPhysics Grade 10 Physics Ch3 Motion in One DimensionozasviNo ratings yet
- Switch Mode Power Supply Basics TutorialDocument16 pagesSwitch Mode Power Supply Basics TutorialDavidNo ratings yet
- Flasher 5: Programming Tool For Serial in Circuit Programming of Microcontrollers With On-Chip FlashDocument16 pagesFlasher 5: Programming Tool For Serial in Circuit Programming of Microcontrollers With On-Chip FlashAjay AroraNo ratings yet
- Design Guide for Off-line Fixed Frequency DCM Flyback ConverterDocument12 pagesDesign Guide for Off-line Fixed Frequency DCM Flyback Converterdavid reyesNo ratings yet
- ZVS Full BridgeDocument20 pagesZVS Full Bridgejameschall1No ratings yet
- Filtered Power SupplyDocument39 pagesFiltered Power SupplyAngelo Mark Ordoña Porgatorio0% (1)
- Application Software Design Guideline for Process IndustryDocument16 pagesApplication Software Design Guideline for Process IndustryEmilianoVendittiNo ratings yet
- Constant and Green Mode Operation Technique in Flyback and Push-Pull DC-DC ConverterDocument13 pagesConstant and Green Mode Operation Technique in Flyback and Push-Pull DC-DC ConverterIJRASETPublicationsNo ratings yet
- DIY Short Circuit Overcurrent Protection PDFDocument6 pagesDIY Short Circuit Overcurrent Protection PDFsarath39438No ratings yet
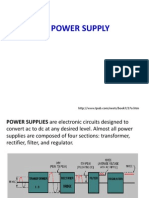
- How A Power Supply WorksDocument3 pagesHow A Power Supply Worksperkinsc305No ratings yet
- Alternate Fuel From Synthetic Plastics Waste - ReviewDocument5 pagesAlternate Fuel From Synthetic Plastics Waste - ReviewSachin SahaniNo ratings yet
- Buck Converter Design NoteDocument17 pagesBuck Converter Design NoteZhao XuNo ratings yet
- Switch-Mode Power Supplies - SPICE Simulations and Practical Designs - EE Times3 PDFDocument7 pagesSwitch-Mode Power Supplies - SPICE Simulations and Practical Designs - EE Times3 PDFVIJAYPUTRA0% (1)
- 12 Steps Design SMPS TransformersDocument11 pages12 Steps Design SMPS TransformersRnDES1 CMLNo ratings yet
- Power Electronics - Kits PDFDocument31 pagesPower Electronics - Kits PDFGaganVishwakarmaNo ratings yet
- Overview and Power Devices PDFDocument48 pagesOverview and Power Devices PDFSebastian LangkahNo ratings yet
- What Is A Switched-Mode Power Supply (SMPS) - Definition From Techopedia PDFDocument1 pageWhat Is A Switched-Mode Power Supply (SMPS) - Definition From Techopedia PDFBright Tendai ChingwenaNo ratings yet
- Flyback Transformer Tutorial Function and DesignDocument5 pagesFlyback Transformer Tutorial Function and DesignDany NewbyNo ratings yet
- AC/DC Converters Serve as Rectifiers to Convert AC to DCDocument11 pagesAC/DC Converters Serve as Rectifiers to Convert AC to DCMoon BorahNo ratings yet
- Biomass Gasification LectureDocument32 pagesBiomass Gasification Lectureaz33mNo ratings yet
- UC3845 Technical ExplanationDocument15 pagesUC3845 Technical ExplanationankurmalviyaNo ratings yet
- Digital Logic Design ProjectsDocument23 pagesDigital Logic Design ProjectsMychon KanNo ratings yet
- Testing The PIC Microcontroller (Pic 16F877A)Document6 pagesTesting The PIC Microcontroller (Pic 16F877A)Matt ImriNo ratings yet
- Microwave Oven Inverter HV Power SupplyDocument8 pagesMicrowave Oven Inverter HV Power SupplyADe Muslimin MadridistaNo ratings yet
- Lab Manual Separation Tech February 2023Document41 pagesLab Manual Separation Tech February 2023Nurhanis DayanaNo ratings yet
- DriverDocument2 pagesDriverDeepak LaserNo ratings yet
- Discover The Small Switch Mode Power Supplies Modification SecretsDocument10 pagesDiscover The Small Switch Mode Power Supplies Modification Secretscarlos1670201480% (5)
- Fundamentals of Refining and Petrochemical Engineering - Final - docx@BENEDICTDocument95 pagesFundamentals of Refining and Petrochemical Engineering - Final - docx@BENEDICTetheldoe100No ratings yet
- Application of SyngasDocument10 pagesApplication of SyngasJaydeep Patel100% (1)
- Introduction Power SupplyDocument46 pagesIntroduction Power SupplyYsrael M. TatlonghariNo ratings yet
- Cam Design - Pt1Document29 pagesCam Design - Pt1JC ZayasNo ratings yet
- SP Racing F3 FC Board(Deluxe) internal OSD Specification and SetupDocument5 pagesSP Racing F3 FC Board(Deluxe) internal OSD Specification and SetupibyselfNo ratings yet
- EZ-ROJ 1 Reference ManualDocument28 pagesEZ-ROJ 1 Reference ManualRohidas Vilas PawarNo ratings yet
- Ps4-200 Hardware h1184gDocument94 pagesPs4-200 Hardware h1184gEmmanuel PatryNo ratings yet
- 9 - 9 - 9 - 9 - 9 - 9 - 9 - 20130322 - 093051617 - PMT-12V35W1AA-MPBU-TW-201206031-UL Report PDFDocument85 pages9 - 9 - 9 - 9 - 9 - 9 - 9 - 20130322 - 093051617 - PMT-12V35W1AA-MPBU-TW-201206031-UL Report PDFA. LobsterNo ratings yet
- ZVS OriginalDocument9 pagesZVS OriginaldllabarreNo ratings yet
- Newbies Guide To CRIUS MultiWii SE Board and SoftwareDocument10 pagesNewbies Guide To CRIUS MultiWii SE Board and SoftwareTatimaxNo ratings yet
- CRIUS MultiWii SE BoardDocument13 pagesCRIUS MultiWii SE BoardhkycflogNo ratings yet
- Crius All in One Pro V1.3docxDocument9 pagesCrius All in One Pro V1.3docxAdrian TudorNo ratings yet
- ARRIS F210 User Manual F3Document19 pagesARRIS F210 User Manual F3eddieduff281No ratings yet
- Manual For Smart3 REV 2Document7 pagesManual For Smart3 REV 2Axel CipolliniNo ratings yet
- Crius AIOP Manual MWCDocument14 pagesCrius AIOP Manual MWCNeilNo ratings yet
- Arduino Uno CNC ShieldDocument11 pagesArduino Uno CNC ShieldMărian IoanNo ratings yet
- Ks0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleDocument13 pagesKs0096 Keyestudio CNC Kit / CNC Shield V4.0 + Nano 3.0+3pcs A4988 Driver / GRBL CompatibleBarmaley67No ratings yet
- HGLRC F428-TX20 V2-ManualDocument15 pagesHGLRC F428-TX20 V2-ManualWilson CarreiraNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Agenda: Course Overview Getting Started With CDocument10 pagesAgenda: Course Overview Getting Started With CHiroshi TakeshiNo ratings yet
- $ Cat Welcome.c: Welcome To COS 217 Introduction To Programming Systems Fall 2019Document55 pages$ Cat Welcome.c: Welcome To COS 217 Introduction To Programming Systems Fall 2019Hiroshi TakeshiNo ratings yet
- O M S IC: ATA2188 DatasheetDocument13 pagesO M S IC: ATA2188 DatasheetarifactoryNo ratings yet
- Christopher Dall - Arm Timers and Fire PDFDocument43 pagesChristopher Dall - Arm Timers and Fire PDFHiroshi TakeshiNo ratings yet
- MachXO3L StarterKit UGDocument28 pagesMachXO3L StarterKit UGDavid ParkerNo ratings yet
- Second AttempDocument9 pagesSecond AttempAhmed GadooNo ratings yet
- Privacy Policy (Fishie, Friend) PDFDocument4 pagesPrivacy Policy (Fishie, Friend) PDFRachel Kristen Ch'ngNo ratings yet
- TerrSet MANUALDocument392 pagesTerrSet MANUALM MuhammadNo ratings yet
- Setup And Access The Xtreamer On Your Home NetworkDocument10 pagesSetup And Access The Xtreamer On Your Home NetworkbublilNo ratings yet
- Boolean query processing exercisesDocument2 pagesBoolean query processing exercisesAhmed gamal ebiedNo ratings yet
- Manual Yamaha SongBookDocument16 pagesManual Yamaha SongBookRayNo ratings yet
- Adoption and Usability of Low-Code - No-Code Development ToolsDocument8 pagesAdoption and Usability of Low-Code - No-Code Development Toolsdovat82201No ratings yet
- Dse Gencomm enDocument38 pagesDse Gencomm enbaguspermana7No ratings yet
- Research Essay - Cybersecurity - Final DraftDocument8 pagesResearch Essay - Cybersecurity - Final Draftapi-357261601No ratings yet
- Ilom UsersguideDocument186 pagesIlom UsersguideyesilyurtavNo ratings yet
- Internet of Things PrimeDocument3 pagesInternet of Things Primemohamed yasinNo ratings yet
- Xr11 ManualDocument1 pageXr11 ManualMike BelandNo ratings yet
- We Provide The Most Reliable Storage Solution: January.2010 (Rev.4.0)Document12 pagesWe Provide The Most Reliable Storage Solution: January.2010 (Rev.4.0)Quete ImportaNo ratings yet
- STP protocol spanning tree informationDocument5 pagesSTP protocol spanning tree informationaakashtrivediNo ratings yet
- Module Code: DEE40082 Module Title: Project 1 Course: Diploma in Electrical and Electronic EngineeringDocument8 pagesModule Code: DEE40082 Module Title: Project 1 Course: Diploma in Electrical and Electronic EngineeringNurhidayah JamaluddinNo ratings yet
- (Video Title) : FPGA Design For Embedded SystemsDocument13 pages(Video Title) : FPGA Design For Embedded SystemsAl AminNo ratings yet
- Smartsheet Knowledge Management Solution GuideDocument22 pagesSmartsheet Knowledge Management Solution Guideأحمد المنصورNo ratings yet
- cp3404 Information Security Quiz AnswerDocument10 pagescp3404 Information Security Quiz AnswerNhat Long NguyenNo ratings yet
- ReadmeDocument3 pagesReadmeSebastian Montaño RodriguezNo ratings yet
- Canvas Quiz #2 (Sect. 1.1-1.7)Document8 pagesCanvas Quiz #2 (Sect. 1.1-1.7)Kking ChungNo ratings yet
- Talend Open Studio For ESB v6.1 Virtual Tour 2015Document18 pagesTalend Open Studio For ESB v6.1 Virtual Tour 2015Tejeswar NNo ratings yet
- Rashid Beach Resort Online Reservation SystemDocument13 pagesRashid Beach Resort Online Reservation SystemJohn Joseph PasawaNo ratings yet
- IBM Watson Defeats Humans on JeopardyDocument18 pagesIBM Watson Defeats Humans on JeopardyPraveen NairNo ratings yet
- Aim 3.1Document3 pagesAim 3.1Basavanagowda GowdaNo ratings yet
- Curriculum Vitae of SK Mahmudul HoqueDocument4 pagesCurriculum Vitae of SK Mahmudul HoquerubelklnNo ratings yet
- Assistive Technology: Ikhwan HafidhiDocument16 pagesAssistive Technology: Ikhwan HafidhiMohammad Iskandar DzulkurnainNo ratings yet
- OPTIR Touch Manual (32A Model)Document8 pagesOPTIR Touch Manual (32A Model)Nitish Rajani Chunilal MethaNo ratings yet
- Device DriversDocument474 pagesDevice DriversarchankumarturagaNo ratings yet
- Forum Post Assistant v1.6.4 - en-GBDocument8 pagesForum Post Assistant v1.6.4 - en-GBhkNo ratings yet