You might also like
- Ficha Tec. de Obra X Ad. Direc.Document2 pagesFicha Tec. de Obra X Ad. Direc.Carlos Alberto Mayta RamirezNo ratings yet
- IntroduccionDocument8 pagesIntroduccionalex benditaNo ratings yet
- Inf Ser R029 112016Document154 pagesInf Ser R029 112016alex benditaNo ratings yet
- Guia Metodologica Impacto AmbientalDocument9 pagesGuia Metodologica Impacto AmbientalEmi MarioNo ratings yet
- Instalaciones Convencionales y NoDocument9 pagesInstalaciones Convencionales y Noalex bendita0% (1)
- Libros de La IcgDocument7 pagesLibros de La Icgjundavis3No ratings yet
- 02 Memoria Descriptiva JulioDocument14 pages02 Memoria Descriptiva JulioAlex MnNo ratings yet
- Estructuracion y PredimensionamientoDocument7 pagesEstructuracion y PredimensionamientoEdgar Jimenez SaavedraNo ratings yet
- 02 Memoria Descriptiva JulioDocument8 pages02 Memoria Descriptiva Julioalex benditaNo ratings yet
- CRONOGRAMADocument1 pageCRONOGRAMAalex benditaNo ratings yet
- 1 - IntroducciónDocument10 pages1 - Introducciónalex benditaNo ratings yet
- 2Document14 pages2alex benditaNo ratings yet
- Modulo 1 Introduccion A La NormatividadDocument4 pagesModulo 1 Introduccion A La NormatividadAlex MnNo ratings yet
- AguaDocument36 pagesAguaSunevshïthä Vee Macd AtmriNo ratings yet
- Sistemas de Orden SuperiorDocument5 pagesSistemas de Orden Superioralex benditaNo ratings yet
- Memoria de Calculo 2017Document14 pagesMemoria de Calculo 2017alex benditaNo ratings yet
- Planificación de proyectos hidráulicos y la necesidad de un Plan NacionalDocument169 pagesPlanificación de proyectos hidráulicos y la necesidad de un Plan Nacionalalex benditaNo ratings yet
- Instalaciones Convencionales Y No ConvencionalesDocument11 pagesInstalaciones Convencionales Y No Convencionalesalex benditaNo ratings yet
- Catalogo MipDocument34 pagesCatalogo MipfrancNo ratings yet
- 1 Memoria de Calculo HidraulicoDocument34 pages1 Memoria de Calculo Hidraulicoalex benditaNo ratings yet
- Planificación de proyectos hidráulicos y la necesidad de un Plan NacionalDocument169 pagesPlanificación de proyectos hidráulicos y la necesidad de un Plan Nacionalalex benditaNo ratings yet
- Microsoft Word - 001 Caratula AgradecimientosDocument62 pagesMicrosoft Word - 001 Caratula Agradecimientosalex benditaNo ratings yet
- Planificación de proyectos hidráulicos y la necesidad de un Plan NacionalDocument169 pagesPlanificación de proyectos hidráulicos y la necesidad de un Plan Nacionalalex benditaNo ratings yet
- Predimensionamiento de EscalerasDocument13 pagesPredimensionamiento de EscalerasAntony CutisacaNo ratings yet
- Guía Física II UNAMDocument87 pagesGuía Física II UNAMAna OleaNo ratings yet
- Manual Acad 3D PDFDocument32 pagesManual Acad 3D PDFalex benditaNo ratings yet
- Trabajo Evluacion No. 01 1 MAX3Document2 pagesTrabajo Evluacion No. 01 1 MAX3alex benditaNo ratings yet
- Guías Dirigidas Del Curso de Contabilidad 2 2013 - 1: Facultad de Ciencias EmpresarialesDocument49 pagesGuías Dirigidas Del Curso de Contabilidad 2 2013 - 1: Facultad de Ciencias Empresarialesls maxNo ratings yet
- METRADO deDocument19 pagesMETRADO dealex benditaNo ratings yet
- Motor Electrico Sin EscobillasDocument10 pagesMotor Electrico Sin EscobillasSnairayNo ratings yet
- Máquinas SimplesDocument4 pagesMáquinas SimplesJeimy Rafael Zacarias RodriguezNo ratings yet
- Checklist Camion CisternaDocument3 pagesChecklist Camion CisternaEver Luis Toledo ChancaNo ratings yet
- Capitulo 09 Ciclo OttoDocument30 pagesCapitulo 09 Ciclo Ottoraul cabanillasNo ratings yet
- Grúas tipo puente: características y tiposDocument33 pagesGrúas tipo puente: características y tiposjose reategui llempenNo ratings yet
- Ex355 Tier2 EsDocument970 pagesEx355 Tier2 EsYido Alvarz100% (2)
- Inv FisDocument38 pagesInv FisJefferson CarranzaNo ratings yet
- Catalogo - L (UNE Standard Cable) PDFDocument55 pagesCatalogo - L (UNE Standard Cable) PDFCarlos liceaNo ratings yet
- Mantenimiento mecánico de transmisiones por engranajes y correasDocument40 pagesMantenimiento mecánico de transmisiones por engranajes y correasFelix AtajoNo ratings yet
- Manual de Uso ReishauerDocument23 pagesManual de Uso ReishauerManuel CardozoNo ratings yet
- Ejercicios de Palancas y PoleasDocument12 pagesEjercicios de Palancas y PoleasAnonymous bw3KTM3WbNo ratings yet
- Foro 2 - MotoresDocument10 pagesForo 2 - MotoresJose Alexander Diestra CortezNo ratings yet
- Practica 1 Pesos de Las Piezas Del MotorDocument22 pagesPractica 1 Pesos de Las Piezas Del MotorCristi HernandezNo ratings yet
- Tarifario mantenimiento gama pesadaDocument1 pageTarifario mantenimiento gama pesadacharles19797126100% (1)
- Elementos de Maquinas IDocument19 pagesElementos de Maquinas ILi Rodriguez0% (2)
- Electricidad Motores y ManiobrasDocument44 pagesElectricidad Motores y ManiobrasRonald Butron SalvatierraNo ratings yet
- ECU - Reparación de Computadoras Automotrices - Seminario - Manual Del Participante PDFDocument48 pagesECU - Reparación de Computadoras Automotrices - Seminario - Manual Del Participante PDFCharly Rodriguez100% (14)
- Eje Trasero HL1 y HL2 EspañolDocument15 pagesEje Trasero HL1 y HL2 EspañolJaime Noches100% (2)
- DistribucionDocument4 pagesDistribucionPablo ZagiaNo ratings yet
- Relación de Compresión de Un Motor de Combustión InternaDocument5 pagesRelación de Compresión de Un Motor de Combustión InternaRodrigoNo ratings yet
- MANTENIMIENTO CAMIONDocument25 pagesMANTENIMIENTO CAMIONTallersofia AutomotrizNo ratings yet
- SOBREALIMENTACIONDocument13 pagesSOBREALIMENTACIONRuth S RuizNo ratings yet
- MotorDocument139 pagesMotorMarcos Montes100% (1)
- 02 Problema Generadores Sincronos Operacion Paralelo PDFDocument6 pages02 Problema Generadores Sincronos Operacion Paralelo PDFPool Martinez AlejandroNo ratings yet
- Kudu BRO Driveheads INT SPA WEB (Kudu3)Document4 pagesKudu BRO Driveheads INT SPA WEB (Kudu3)Abraham RojasNo ratings yet
- Práctica Lab de Potencia FluidaDocument5 pagesPráctica Lab de Potencia FluidaKevin MontoyaNo ratings yet
- Tesis - Sistematizacion de MP en Maquinaria - Realizado Por Ney CepedaDocument152 pagesTesis - Sistematizacion de MP en Maquinaria - Realizado Por Ney Cepedaneycepeda67% (3)
- Trans Manual Ax15Document444 pagesTrans Manual Ax15luis100% (1)
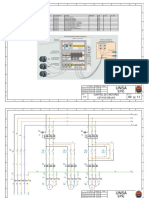
- DE Control de 3 Motores Lista de Dibujos: 29/12/16 29/12/16 29/12/16 CJCM CJCM CJCMDocument11 pagesDE Control de 3 Motores Lista de Dibujos: 29/12/16 29/12/16 29/12/16 CJCM CJCM CJCMJose Manuel Moa PerezNo ratings yet
- Capitulo Iv Diseño Turbo y MDP PDFDocument18 pagesCapitulo Iv Diseño Turbo y MDP PDFJulioOrtegaNo ratings yet