You might also like
- A Distribution-Based Clustering Algorithm For Mining in Large Spatial DatabasesDocument8 pagesA Distribution-Based Clustering Algorithm For Mining in Large Spatial DatabasesMuhammad Kevin Adnan MurbiantoroNo ratings yet
- GDBSCANDocument30 pagesGDBSCANkkoushikgmailcomNo ratings yet
- ST-DBSCAN: An Algorithm For Clustering Spatial-Temporal DataDocument14 pagesST-DBSCAN: An Algorithm For Clustering Spatial-Temporal Datajose puma chavezNo ratings yet
- An Efficient Enhanced K-Means Clustering AlgorithmDocument8 pagesAn Efficient Enhanced K-Means Clustering Algorithmahmed_fahim98No ratings yet
- Pam Clustering Technique ExplainedDocument11 pagesPam Clustering Technique ExplainedsamakshNo ratings yet
- OPTICS: Ordering Points To Identify The Clustering StructureDocument12 pagesOPTICS: Ordering Points To Identify The Clustering StructureqoberifNo ratings yet
- Distributed Clustering Large Data SetsDocument10 pagesDistributed Clustering Large Data SetsEugene PirogovNo ratings yet
- Cluster Analysis ClusteringDocument6 pagesCluster Analysis Clustering17CSE97- VIKASHINI TPNo ratings yet
- Recursive Hierarchical Clustering AlgorithmDocument7 pagesRecursive Hierarchical Clustering Algorithmreader29No ratings yet
- Ambo University: Inistitute of TechnologyDocument15 pagesAmbo University: Inistitute of TechnologyabayNo ratings yet
- An Empirical Evaluation of Density-Based Clustering TechniquesDocument8 pagesAn Empirical Evaluation of Density-Based Clustering Techniquessuchi87No ratings yet
- Cluster Evaluation Techniques: Atds AssignmentDocument4 pagesCluster Evaluation Techniques: Atds AssignmentArcha ShajiNo ratings yet
- Efficient Hierarchical Clustering of Large Data Sets Using P-TreesDocument4 pagesEfficient Hierarchical Clustering of Large Data Sets Using P-Treesnobeen666No ratings yet
- A Novel Approach of Implementing An Optimal K-Means Plus Plus Algorithm For Scalar DataDocument6 pagesA Novel Approach of Implementing An Optimal K-Means Plus Plus Algorithm For Scalar DatasinigerskyNo ratings yet
- A Parallel Study On Clustering Algorithms in Data MiningDocument7 pagesA Parallel Study On Clustering Algorithms in Data MiningAnu IshwaryaNo ratings yet
- 1 A Modified VersionDocument7 pages1 A Modified VersionEdwardNo ratings yet
- Hierarchical Clustering PDFDocument5 pagesHierarchical Clustering PDFLikitha ReddyNo ratings yet
- By Lior Rokach and Oded Maimon: Clustering MethodsDocument5 pagesBy Lior Rokach and Oded Maimon: Clustering MethodsRohit PaulNo ratings yet
- C: A Hierarchical Clustering Algorithm Using Dynamic ModelingDocument22 pagesC: A Hierarchical Clustering Algorithm Using Dynamic ModelingJibesh Kumar BasuriNo ratings yet
- Hierarchical Density-Based Clustering using MapReduceDocument13 pagesHierarchical Density-Based Clustering using MapReduceVidhya RajNo ratings yet
- Embed and Conquer: Scalable Embeddings For Kernel K-Means On MapreduceDocument9 pagesEmbed and Conquer: Scalable Embeddings For Kernel K-Means On MapreducejefferyleclercNo ratings yet
- A Novel Approach For Data Clustering Using Improved K-Means Algorithm PDFDocument6 pagesA Novel Approach For Data Clustering Using Improved K-Means Algorithm PDFNinad SamelNo ratings yet
- Clustering Techniques and Their Applications in EngineeringDocument16 pagesClustering Techniques and Their Applications in EngineeringIgor Demetrio100% (1)
- Comparison of Density-Based Clustering Algorithms DBSCAN and RDBCDocument5 pagesComparison of Density-Based Clustering Algorithms DBSCAN and RDBCsuserNo ratings yet
- A Fully Autonomous Data Density Based Clustering Technique: R.hyde1@lancaster - Ac.uk P.angelov@lancaster - Ac.ukDocument8 pagesA Fully Autonomous Data Density Based Clustering Technique: R.hyde1@lancaster - Ac.uk P.angelov@lancaster - Ac.ukirwhandiNo ratings yet
- Genetic Algorithm-Based Clustering TechniqueDocument11 pagesGenetic Algorithm-Based Clustering TechniqueArmansyah BarusNo ratings yet
- Density-Based Clustering Algorithms Are The Algorithms Which AreDocument1 pageDensity-Based Clustering Algorithms Are The Algorithms Which Areshyamd4No ratings yet
- DWDM Unit-5Document52 pagesDWDM Unit-5Arun kumar SomaNo ratings yet
- Enhancing The Exactness of K-Means Clustering Algorithm by CentroidsDocument7 pagesEnhancing The Exactness of K-Means Clustering Algorithm by CentroidserpublicationNo ratings yet
- 10 Marks QuestionsDocument19 pages10 Marks QuestionsAnupriya VeerasamyNo ratings yet
- 期末報告-02clustering and Anomaly Detection Method Using Nearest and Farthest NeighborDocument15 pages期末報告-02clustering and Anomaly Detection Method Using Nearest and Farthest Neighbor鄭毓賢No ratings yet
- A Comparative Study of K-Means, K-Medoid and Enhanced K-Medoid AlgorithmsDocument4 pagesA Comparative Study of K-Means, K-Medoid and Enhanced K-Medoid AlgorithmsIJAFRCNo ratings yet
- Memory Efficient Kernel Approximation: . This Work Was Done Before Joining GoogleDocument32 pagesMemory Efficient Kernel Approximation: . This Work Was Done Before Joining Googlehatakekakashinrt2033No ratings yet
- Cluster Analysis or Clustering Is The Art of Separating The Data Points Into Dissimilar Group With ADocument11 pagesCluster Analysis or Clustering Is The Art of Separating The Data Points Into Dissimilar Group With AramaabbidiNo ratings yet
- DMDW R20 Unit 5Document21 pagesDMDW R20 Unit 5car sorryNo ratings yet
- A Robust Deterministic Annealing Algorithm For Data ClusteringDocument17 pagesA Robust Deterministic Annealing Algorithm For Data ClusteringRahul SinhaNo ratings yet
- 10 Clus BasicDocument92 pages10 Clus BasicMike KuNo ratings yet
- Pam Clustering TechniqueDocument13 pagesPam Clustering TechniqueAnoyNo ratings yet
- DM BS Lec8 ClusteringDocument48 pagesDM BS Lec8 ClusteringrubaNo ratings yet
- Analysis and Study of Incremental DBSCAN Clustering AlgorithmDocument15 pagesAnalysis and Study of Incremental DBSCAN Clustering Algorithmadmin2146No ratings yet
- Dbscan: Fast Density-Based Clustering With R: Michael Hahsler Matthew PiekenbrockDocument28 pagesDbscan: Fast Density-Based Clustering With R: Michael Hahsler Matthew PiekenbrockIrina AlexandraNo ratings yet
- Depso Model For Efficient Clustering Using Drifting Concepts.Document5 pagesDepso Model For Efficient Clustering Using Drifting Concepts.Dr J S KanchanaNo ratings yet
- An Introduction To Clustering MethodsDocument8 pagesAn Introduction To Clustering MethodsmagargieNo ratings yet
- K-medoids and PAM Clustering of Rules from Insurance DataDocument6 pagesK-medoids and PAM Clustering of Rules from Insurance Datamoldova89No ratings yet
- Handling Data Skew in Mapreduce: Benjamin Gufler, Nikolaus Augsten, Angelika Reiser and Alfons KemperDocument10 pagesHandling Data Skew in Mapreduce: Benjamin Gufler, Nikolaus Augsten, Angelika Reiser and Alfons KemperShreyansh DiwanNo ratings yet
- Analyzing Performance of Clustering AlgorithmsDocument5 pagesAnalyzing Performance of Clustering AlgorithmsNaresh MathurNo ratings yet
- Analyzing Performance of Clustering AlgorithmsDocument5 pagesAnalyzing Performance of Clustering AlgorithmsNaresh MathurNo ratings yet
- Big Data: An Optimized Approach For Cluster Initialization: Open Access ResearchDocument19 pagesBig Data: An Optimized Approach For Cluster Initialization: Open Access ResearchEdwardNo ratings yet
- IJIKMv15p091 108altaf6036Document18 pagesIJIKMv15p091 108altaf6036Mujahid QaisraniNo ratings yet
- Automatic Clustering Using An Improved Differential Evolution AlgorithmDocument20 pagesAutomatic Clustering Using An Improved Differential Evolution Algorithmavinash223No ratings yet
- Analysis&Comparisonof Efficient TechniquesofDocument5 pagesAnalysis&Comparisonof Efficient TechniquesofasthaNo ratings yet
- Chang Liang Et Al - Scaling Up Kernel Grower Clustering Method For Large Data Sets Via Core-SetsDocument7 pagesChang Liang Et Al - Scaling Up Kernel Grower Clustering Method For Large Data Sets Via Core-SetsTuhmaNo ratings yet
- Document Clustering in Web Search Engine: International Journal of Computer Trends and Technology-volume3Issue2 - 2012Document4 pagesDocument Clustering in Web Search Engine: International Journal of Computer Trends and Technology-volume3Issue2 - 2012surendiran123No ratings yet
- Comparing Machine Learning Clustering Algorithms on Sample DatasetDocument10 pagesComparing Machine Learning Clustering Algorithms on Sample DatasetBidof VicNo ratings yet
- A Fast K-Means Implementation Using CoresetsDocument10 pagesA Fast K-Means Implementation Using CoresetsHiinoNo ratings yet
- Analysis of Dendrogram Tree For Identifying and Visualizing Trends in Multi-Attribute Transactional DataDocument5 pagesAnalysis of Dendrogram Tree For Identifying and Visualizing Trends in Multi-Attribute Transactional Datasurendiran123No ratings yet
- Clustering For Big Data AnalyticsDocument28 pagesClustering For Big Data AnalyticshakonaNo ratings yet
- Clustering large-scale data using modified affinity propagationDocument11 pagesClustering large-scale data using modified affinity propagationMUHAMMAD MUHAJIR, S.Si., M.Sc.No ratings yet
- Gautam A. KudaleDocument6 pagesGautam A. KudaleHellbuster45No ratings yet
- Docs 2Document9 pagesDocs 2JulioMartinezNo ratings yet
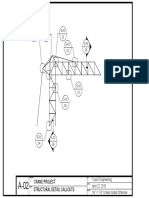
- Structural Detail Callouts Crane Project: Trusst Engineering April 22, 2016 1/8" 1'-0" Unless Noted OthersiseDocument1 pageStructural Detail Callouts Crane Project: Trusst Engineering April 22, 2016 1/8" 1'-0" Unless Noted OthersiseJulioMartinezNo ratings yet
- Crane Project Construction Document Package: Trusst Engineering June 7, 2016 N/A Dylan Jones 24X36"Document8 pagesCrane Project Construction Document Package: Trusst Engineering June 7, 2016 N/A Dylan Jones 24X36"JulioMartinezNo ratings yet
- MATH 185. Introduction To Computational Statistics (4) : Prerequisites: Math 181B or Consent of InstructorDocument1 pageMATH 185. Introduction To Computational Statistics (4) : Prerequisites: Math 181B or Consent of InstructorJulioMartinezNo ratings yet
- Java Lab Results MartinezDocument6 pagesJava Lab Results MartinezJulioMartinezNo ratings yet
- This Is A Random PDFDocument1 pageThis Is A Random PDFJulioMartinezNo ratings yet
- Lab8 MainDocument3 pagesLab8 MainJulioMartinezNo ratings yet
- Document 1Document1 pageDocument 1JulioMartinezNo ratings yet
- Computer 1Document4 pagesComputer 1JulioMartinezNo ratings yet
- Document 1Document1 pageDocument 1JulioMartinezNo ratings yet
- 10.2165/00007256 200838100 00004 PDFDocument24 pages10.2165/00007256 200838100 00004 PDFStefano LivieraNo ratings yet
- UNIT-2 Data ModelsDocument77 pagesUNIT-2 Data ModelsBhautiksinh ValaNo ratings yet
- Mule 2.2.1 Users GuideDocument733 pagesMule 2.2.1 Users GuideJun Jie GongNo ratings yet
- Lab 17Document9 pagesLab 17Sherriemae SabundoNo ratings yet
- 20dce007 Practical1,2Document63 pages20dce007 Practical1,2Anand BapodaraNo ratings yet
- P2LPC Users Manual PDFDocument34 pagesP2LPC Users Manual PDFFatihDutaAlamsyahNo ratings yet
- OPTIMA Installation ToolDocument76 pagesOPTIMA Installation ToolAngel DobrevNo ratings yet
- Senior Technical Program Manager in San Francisco Bay CA Resume Kimsukh KunduDocument2 pagesSenior Technical Program Manager in San Francisco Bay CA Resume Kimsukh KunduKimsukhKunduNo ratings yet
- Am85c30 10PCDocument68 pagesAm85c30 10PCDrykolosNo ratings yet
- BW Base RepDocument324 pagesBW Base RepMushtaq AhmedNo ratings yet
- Zbdciw31 Template E&c r1Document12 pagesZbdciw31 Template E&c r1Luwani LinoNo ratings yet
- Business Analytics NotesDocument5 pagesBusiness Analytics NotesSARGAM JAINNo ratings yet
- MS AccessDocument9 pagesMS AccessRaja PrasantNo ratings yet
- DB2 Basic CommandsDocument6 pagesDB2 Basic Commandskhalid.mallick7258No ratings yet
- Criminology - RESEARCH PROPOSAL CHAPTER 1 TO 3Document43 pagesCriminology - RESEARCH PROPOSAL CHAPTER 1 TO 3Seradallab Ch Rish100% (1)
- Indonesia rice self-sufficiency analysis using dynamic modelDocument11 pagesIndonesia rice self-sufficiency analysis using dynamic modeldita pratiwiNo ratings yet
- SIP - 190201089 - DR Bidisha Banerjee - PGDM - 2019-21 PDFDocument42 pagesSIP - 190201089 - DR Bidisha Banerjee - PGDM - 2019-21 PDFSakshi ShahNo ratings yet
- FRP C & DS DumpsDocument711 pagesFRP C & DS DumpsMirza Ahmed100% (1)
- Target Import Data PDFDocument19 pagesTarget Import Data PDFAbraham Y MbeweNo ratings yet
- Mid Term Exam SQLDocument17 pagesMid Term Exam SQLSebastian Ajesh100% (1)
- TI3G 12 Tugas3 Galih Maulana Adji 1641720131Document7 pagesTI3G 12 Tugas3 Galih Maulana Adji 1641720131GalihNo ratings yet
- Tra Job AdvertDocument23 pagesTra Job AdvertDaniel EudesNo ratings yet
- IndusInd Bank LimitedDocument75 pagesIndusInd Bank LimitedDebzane PatiNo ratings yet
- The Worlds of Database Systems: File Systems and DatabasesDocument50 pagesThe Worlds of Database Systems: File Systems and Databasespuspa_sweetoo6550No ratings yet
- CS403 Quiz-2 by Vu Topper RMDocument53 pagesCS403 Quiz-2 by Vu Topper RMabbas abbas khanNo ratings yet
- Data Mining Versus Knowledge Discovery IDocument3 pagesData Mining Versus Knowledge Discovery IMohit SainiNo ratings yet
- Why Statistics is Important for EveryoneDocument21 pagesWhy Statistics is Important for EveryoneREKKI100% (1)
- Nominum Data Aggregator 1.5.0 Manual 20121119Document18 pagesNominum Data Aggregator 1.5.0 Manual 20121119trialoserNo ratings yet
- Methodology Research Paper SampleDocument6 pagesMethodology Research Paper Samplejiyzzxplg100% (1)
- LogDocument2 pagesLogمنتظر باسمNo ratings yet