You might also like
- EcuacionesDocument3 pagesEcuacionesSelma Albuquerque WexelNo ratings yet
- Practica 3Document12 pagesPractica 3KurokoSanchezNo ratings yet
- Método Lyapunov para análisis de estabilidad de sistemas no linealesDocument7 pagesMétodo Lyapunov para análisis de estabilidad de sistemas no linealesErick HernándezNo ratings yet
- Sistemas No Lineales Ecuaciones DiferencialesDocument28 pagesSistemas No Lineales Ecuaciones DiferencialesjuztliNo ratings yet
- Análisis de la Estabilidad del Equilibrio en Sistemas NeumáticosDocument38 pagesAnálisis de la Estabilidad del Equilibrio en Sistemas NeumáticosCuqui CasianoNo ratings yet
- Estabilidad de LYAPUNOVDocument11 pagesEstabilidad de LYAPUNOVRonyVargasNo ratings yet
- Artefacto EspacialDocument14 pagesArtefacto EspacialIvan RamirezNo ratings yet
- Tarea. Sistemas Discretos. Liapunov.Document10 pagesTarea. Sistemas Discretos. Liapunov.Victor JuárezNo ratings yet
- Funcion DescriptivaDocument14 pagesFuncion Descriptivajimmy_caolNo ratings yet
- Análisis estabilidad sistema borroso LMIDocument7 pagesAnálisis estabilidad sistema borroso LMILuciano Dell'OrfanoNo ratings yet
- LyapunovDocument8 pagesLyapunovlu casNo ratings yet
- Asignación de polos en MATLAB para el control de sistemasDocument21 pagesAsignación de polos en MATLAB para el control de sistemasVictor ApolinaresNo ratings yet
- Tarea Especial 20131256Document6 pagesTarea Especial 20131256Miguel GlzNo ratings yet
- 14 - U 10 Vibraciones 2 GDL 2017Document28 pages14 - U 10 Vibraciones 2 GDL 2017Ercilia Eulalia MaldonadoNo ratings yet
- Teoremas de Estabilidad de Lyapunov y su aplicación al pénduloDocument10 pagesTeoremas de Estabilidad de Lyapunov y su aplicación al péndulocorpses88No ratings yet
- Práctica 3Document6 pagesPráctica 3Jesus Josué González GutiérrezNo ratings yet
- Equilibrio MecánicoDocument8 pagesEquilibrio MecánicoMiguel Yupanqui Estrada100% (1)
- El TigreDocument10 pagesEl TigreorlandoNo ratings yet
- Estabilidad de LyapunovDocument32 pagesEstabilidad de LyapunovRaul Negron GodoyNo ratings yet
- Sistemas vibratorios de dos grados de libertadDocument49 pagesSistemas vibratorios de dos grados de libertadAugusto EspinozaNo ratings yet
- Control Por Linealizacion y ConclusionesDocument2 pagesControl Por Linealizacion y ConclusionesJose Narciso Panta FiestasNo ratings yet
- Medi2 U3 A2 OsljDocument5 pagesMedi2 U3 A2 OsljKarina JimenezNo ratings yet
- 18041155-Evalucion U5-ControlDocument46 pages18041155-Evalucion U5-ControlAlex SalcidoNo ratings yet
- ENSAYO - Equilibrio de Fases en Sistemas de Un ComponentDocument3 pagesENSAYO - Equilibrio de Fases en Sistemas de Un Componentyessi retaNo ratings yet
- Criterios de Estabilidad y Bifurcación en RNDocument21 pagesCriterios de Estabilidad y Bifurcación en RNHector TrianaNo ratings yet
- Tarea8 Control3 YuarthHernandezDocument11 pagesTarea8 Control3 YuarthHernandezYuarth HernándezNo ratings yet
- EstabilidadLiapunovSistemasDocument7 pagesEstabilidadLiapunovSistemasBeto EsquivelNo ratings yet
- Bitacora EstabilidadDocument14 pagesBitacora EstabilidadivanNo ratings yet
- Lab 2 Transformada Laplace 2018Document9 pagesLab 2 Transformada Laplace 2018MumulNo ratings yet
- 7 EstabilidadDocument57 pages7 EstabilidadChristian VelazquezNo ratings yet
- Análisis del control del pendubot mediante modelado de estado y linealizaciónDocument20 pagesAnálisis del control del pendubot mediante modelado de estado y linealizaciónJohnffe LloriNo ratings yet
- Unidad V Vib. MecanicasDocument17 pagesUnidad V Vib. MecanicasrobertoNo ratings yet
- El Concepto de EstabilidadDocument16 pagesEl Concepto de EstabilidadDiego RumipullaNo ratings yet
- Modelamiento de Un Sistema Fisico Con Ecuaciones DiferencialesDocument31 pagesModelamiento de Un Sistema Fisico Con Ecuaciones DiferencialesSandra ChachaNo ratings yet
- Estabilidad en Sistemas DinamicosDocument21 pagesEstabilidad en Sistemas DinamicosMiguel MejiaNo ratings yet
- Ecuaciones rectoras para sistemas de un solo grado de libertadDocument41 pagesEcuaciones rectoras para sistemas de un solo grado de libertadGustavo ArmellaNo ratings yet
- ObservadorDocument40 pagesObservadorJosé Eduardo ChairezNo ratings yet
- Estabilidad LyapunovDocument10 pagesEstabilidad LyapunovSantiago Vergara HernandezNo ratings yet
- Lyapunov Método de Control No LinealDocument10 pagesLyapunov Método de Control No LinealMichael PrettoNo ratings yet
- 5.1 Vibración de Modo Normal para Sistemas de Dos Grados de LibertadDocument7 pages5.1 Vibración de Modo Normal para Sistemas de Dos Grados de LibertadEduardo Romo BautistaNo ratings yet
- Análisis de Sistemas de 2do OrdenDocument27 pagesAnálisis de Sistemas de 2do OrdenCésar Augusto Q. LaverianoNo ratings yet
- Capítulo 6 Backstepping: 6.1. IntroducciónDocument39 pagesCapítulo 6 Backstepping: 6.1. IntroducciónSteven MonárrezNo ratings yet
- Medi2 U3 A2 V1Document4 pagesMedi2 U3 A2 V1Karina JimenezNo ratings yet
- Maq Elec I - Generadores DCDocument9 pagesMaq Elec I - Generadores DCEdgar rodriguezNo ratings yet
- Ejercicio 3 Lab Dinámica y VibracionesDocument9 pagesEjercicio 3 Lab Dinámica y VibracionesBekiita Alexa SeguraNo ratings yet
- Practica Moderno 1Document16 pagesPractica Moderno 1Jose Alberto Camacho BernalNo ratings yet
- Modelar y Simular Un Ejemplo de Un Sistema CaóticoDocument10 pagesModelar y Simular Un Ejemplo de Un Sistema CaóticoCristianAriasNo ratings yet
- Péndulo InvertidoDocument14 pagesPéndulo InvertidoRodolfoReyes-Báez100% (1)
- IntroducciónDocument15 pagesIntroduccióngmarconil@hotmail.comNo ratings yet
- Flujo de Potencia Óptimo para Sistemas RadialesDocument7 pagesFlujo de Potencia Óptimo para Sistemas RadialesCruz PorfirioNo ratings yet
- EstabilidadDocument36 pagesEstabilidadCarlos MontoyaNo ratings yet
- Sistemas MdofDocument5 pagesSistemas MdofDiego Norrea WildNo ratings yet
- Oscilaciones Lineales Con Varios Grados de LibertadDocument32 pagesOscilaciones Lineales Con Varios Grados de LibertadAdrianRmzNo ratings yet
- TP6 - Pérez - Agudelo - Sistemas de Ecuaciones Diferenciales LinealesDocument9 pagesTP6 - Pérez - Agudelo - Sistemas de Ecuaciones Diferenciales Linealesangela.perez260477No ratings yet
- Routh HurwitzDocument7 pagesRouth HurwitzAlvaro Raul Gutierrez TovarNo ratings yet
- Unidad 5 Análisis de Flujo de PotenciaDocument30 pagesUnidad 5 Análisis de Flujo de Potenciacarlos jair nicolas rivera100% (1)
- Ejercicios de Ecuaciones Diferenciales OrdinariasFrom EverandEjercicios de Ecuaciones Diferenciales OrdinariasRating: 4 out of 5 stars4/5 (1)
- Rotaciones en MatlabDocument13 pagesRotaciones en MatlabRuben RaygosaNo ratings yet
- Implementación de filtro de Kalman con covarianzas de medición variables R para estimación de estado de robot basado en sensoresDocument2 pagesImplementación de filtro de Kalman con covarianzas de medición variables R para estimación de estado de robot basado en sensoresRuben RaygosaNo ratings yet
- ROS Ubuntu TutorialDocument41 pagesROS Ubuntu TutorialRuben RaygosaNo ratings yet
- Leyes de Los ExponentesDocument10 pagesLeyes de Los ExponentesRuben RaygosaNo ratings yet
- Casos de Sensores de Consumo IndustrialesDocument1 pageCasos de Sensores de Consumo IndustrialesRuben RaygosaNo ratings yet
- Guía Reporte Practicas - ProyectoDocument4 pagesGuía Reporte Practicas - ProyectoRuben RaygosaNo ratings yet
- Manual de Instalación Del Logger para Anemómetro DavisDocument7 pagesManual de Instalación Del Logger para Anemómetro DavisRuben RaygosaNo ratings yet
- Seleccion Aire A CondicionadoDocument2 pagesSeleccion Aire A CondicionadoRuben RaygosaNo ratings yet
- Integración Sistemas Nube APIDocument14 pagesIntegración Sistemas Nube APIRuben RaygosaNo ratings yet
- Montar Un Servidor WebDocument4 pagesMontar Un Servidor WebRuben RaygosaNo ratings yet
- Inversa (Ejemplo 3 DOF)Document4 pagesInversa (Ejemplo 3 DOF)SandraaMGuzmanNo ratings yet
- Interrupciones y Timers Ejemplo Arduino Esp-01 GooglesheetDocument15 pagesInterrupciones y Timers Ejemplo Arduino Esp-01 GooglesheetRuben RaygosaNo ratings yet
- Integración Sistemas Nube APIDocument14 pagesIntegración Sistemas Nube APIRuben RaygosaNo ratings yet
- ORDEN DE SERVICIO 2.doc - 0Document2 pagesORDEN DE SERVICIO 2.doc - 0Ruben RaygosaNo ratings yet
- Clase Wifi Conectar Wifi Arduino Modulo ESP8266, ESP01Document3 pagesClase Wifi Conectar Wifi Arduino Modulo ESP8266, ESP01Ruben RaygosaNo ratings yet
- Flash Modulo Esp8266 ESP-01Document2 pagesFlash Modulo Esp8266 ESP-01Ruben RaygosaNo ratings yet
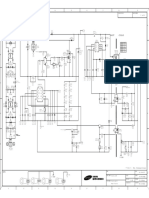
- BN44-00497A PSLF121A03C Samsung PsuDocument3 pagesBN44-00497A PSLF121A03C Samsung PsuSameer Mansuri100% (2)
- Formulacion de Kirchoff Vehiculos MarinosDocument7 pagesFormulacion de Kirchoff Vehiculos MarinosRuben RaygosaNo ratings yet
- Logger BoyaDocument6 pagesLogger BoyaRuben RaygosaNo ratings yet
- Ficha Tecnica InversorDocument2 pagesFicha Tecnica InversorRuben RaygosaNo ratings yet
- Nom 253Document144 pagesNom 253Billy RomanNo ratings yet
- Ficha Tecnica Panel SolarDocument1 pageFicha Tecnica Panel SolarRuben RaygosaNo ratings yet
- Drones AcuáticosDocument1 pageDrones AcuáticosRuben RaygosaNo ratings yet
- SimuladorDocument1 pageSimuladorRuben RaygosaNo ratings yet
- Ejemplo Control Satelite MTR I ADocument3 pagesEjemplo Control Satelite MTR I ARuben RaygosaNo ratings yet
- Del Control Bang Bang Al SMCDocument15 pagesDel Control Bang Bang Al SMCRuben RaygosaNo ratings yet
- Formulacion de Kirchoff Vehiculos MarinosDocument7 pagesFormulacion de Kirchoff Vehiculos MarinosRuben RaygosaNo ratings yet
- Estructura de Datos Pilas (Resolución de Examen)Document5 pagesEstructura de Datos Pilas (Resolución de Examen)WalterChipanaNo ratings yet
- La Funcion de Transferencia Graficos de Flujo de Señal y Diagramas de Bloques PDFDocument4 pagesLa Funcion de Transferencia Graficos de Flujo de Señal y Diagramas de Bloques PDFEdwin Max RChNo ratings yet
- Introducción Programación Dinámica DeterminísticaDocument17 pagesIntroducción Programación Dinámica DeterminísticaLucio RodríguezNo ratings yet
- 2023 06 16 17 48 13 202310060597 Tarea de AlgoritmoDocument29 pages2023 06 16 17 48 13 202310060597 Tarea de AlgoritmoAsalia ZavalaNo ratings yet
- Recursividad: concepto, funciones recursivas y ejemplo del factorialDocument9 pagesRecursividad: concepto, funciones recursivas y ejemplo del factorialERNESTO DAVID GUEVARA SANCHEZNo ratings yet
- UNG-MétodosNuméricos-PrimerParcialDocument21 pagesUNG-MétodosNuméricos-PrimerParcialMateo Bolaños Cañon100% (1)
- Teletransportacion Cuantica 1Document19 pagesTeletransportacion Cuantica 1Salvador Antonio Herrera OrtizNo ratings yet
- EJERCICIOSArbolesDocument7 pagesEJERCICIOSArbolesBrAyan Anthony Mickey Flores CHNo ratings yet
- Pronostico de Relacion Causal - Grupo - 5Document12 pagesPronostico de Relacion Causal - Grupo - 5kelita lavayenNo ratings yet
- Anexo 2 - Tablas CONCEPTO TEORIA DE CONTEODocument3 pagesAnexo 2 - Tablas CONCEPTO TEORIA DE CONTEODIANA XIMENA MURCIA VARGAS0% (1)
- Matemáticas financieras: Cálculos de intereses compuestos y valor presenteDocument5 pagesMatemáticas financieras: Cálculos de intereses compuestos y valor presenteIsaac ZabaletaNo ratings yet
- Optimización de funciones con multiplicadores de LagrangeDocument13 pagesOptimización de funciones con multiplicadores de LagrangeRodrigo PadillaNo ratings yet
- Metodo de Jacobi y Gauss Seidel Kevin LopezDocument8 pagesMetodo de Jacobi y Gauss Seidel Kevin Lopezkevin lopezNo ratings yet
- Paso 3Document5 pagesPaso 3AndresAmayaNo ratings yet
- Ecuaciones en Diferencias FinitasDocument5 pagesEcuaciones en Diferencias FinitasRomelNo ratings yet
- Tabla Binomial y PoissonDocument9 pagesTabla Binomial y PoissonMaureen0% (1)
- Inteligencia Artificial Claudia SanchezDocument7 pagesInteligencia Artificial Claudia SanchezBalwin LadinoNo ratings yet
- 02 ESTIVEN HURTADO SANTOS 20200135 Agrupamiento K Means Ejercicio PropuestoDocument15 pages02 ESTIVEN HURTADO SANTOS 20200135 Agrupamiento K Means Ejercicio PropuestoEstiven Hurtado SantosNo ratings yet
- Ruido Blanco Gaussiano Con MatlabDocument7 pagesRuido Blanco Gaussiano Con MatlabAlex Pomier AliagaNo ratings yet
- Simulación de Sistemas - Generación de números aleatorios y pruebas de uniformidad e independenciaDocument2 pagesSimulación de Sistemas - Generación de números aleatorios y pruebas de uniformidad e independenciaeddy_maxNo ratings yet
- Leccion 1 Evaluacion de IntegralesDocument2 pagesLeccion 1 Evaluacion de Integraleslarval stalkerNo ratings yet
- Polinomio característico y forma canónica de JordanDocument4 pagesPolinomio característico y forma canónica de JordanDonGerardNo ratings yet
- Asignación de tareas y máquinasDocument10 pagesAsignación de tareas y máquinasharveNo ratings yet
- Algoritmo Busqueda Uniforme Plantilla U LibreDocument7 pagesAlgoritmo Busqueda Uniforme Plantilla U Libresantiago baqyeroNo ratings yet
- Dilatacion Del Tiempo y Contraccion Del EspacioDocument15 pagesDilatacion Del Tiempo y Contraccion Del EspacioJhoOn Luna JaenNo ratings yet
- Infografía Horizontal Pasos para Pasar de Una Idea A Un Proyecto MinimalistaDocument1 pageInfografía Horizontal Pasos para Pasar de Una Idea A Un Proyecto MinimalistaEDWIN ALEXANDER ALTAMAR MARTÍNEZNo ratings yet
- Metodos Numericos 2020 I Silabo Arturo Gamarra Moreno ReformuladoDocument6 pagesMetodos Numericos 2020 I Silabo Arturo Gamarra Moreno ReformuladoJames RCNo ratings yet
- DVS Y APLICACIONES Algebra 2 FiubaDocument24 pagesDVS Y APLICACIONES Algebra 2 FiubaNaiara Estefanía NaveiraNo ratings yet
- Cuadro Comparativo Derivación Numérica Y Integración Numérica LizbethDocument2 pagesCuadro Comparativo Derivación Numérica Y Integración Numérica LizbethBryanNo ratings yet
- Resolución sistemas lineales métodos LU Jacobi Gauss-SeidelDocument5 pagesResolución sistemas lineales métodos LU Jacobi Gauss-SeidelCésar Camilo Grefa ValenciaNo ratings yet