You might also like
- Bhimbra-Generalized Theory Electrical MachinesDocument10 pagesBhimbra-Generalized Theory Electrical Machinesdebasishmee5808No ratings yet
- RID 1 ModrobDocument4 pagesRID 1 ModrobbalakaleesNo ratings yet
- nRF24L01P Product Specification 1 0Document78 pagesnRF24L01P Product Specification 1 0CaelumBlimpNo ratings yet
- Adjunct 2Document5 pagesAdjunct 2debasishmee5808No ratings yet
- TrademarksDocument1 pageTrademarksDhyan SwaroopNo ratings yet
- RID 1 ModrobDocument6 pagesRID 1 Modrobdebasishmee5808No ratings yet
- Extramural Funding2012-13Document2 pagesExtramural Funding2012-13debasishmee5808No ratings yet
- Adaptive Control of Linearizable Systems: Fully-StateDocument9 pagesAdaptive Control of Linearizable Systems: Fully-Statedebasishmee5808No ratings yet
- Book ListDocument6 pagesBook Listdebasishmee58080% (1)
- Control SystemDocument22 pagesControl SystemKamran RazaNo ratings yet
- 10 1109@91 481843Document12 pages10 1109@91 481843debasishmee5808No ratings yet
- T Year B.tech Sylla1sbus Revised 18.08.10Document33 pagesT Year B.tech Sylla1sbus Revised 18.08.10Manoj KarmakarNo ratings yet
- Sophus 3Document1 pageSophus 3debasishmee5808No ratings yet
- Electromagnetic Field TheoryDocument3 pagesElectromagnetic Field Theorydebasishmee5808No ratings yet
- AssignmentsDocument11 pagesAssignmentsdebasishmee5808No ratings yet
- Introduction To Nba 16 NovDocument32 pagesIntroduction To Nba 16 Novdebasishmee5808No ratings yet
- AssignmentsDocument11 pagesAssignmentsdebasishmee5808No ratings yet
- Duplicate Doc Diploma CertiDocument1 pageDuplicate Doc Diploma Certidebasishmee5808No ratings yet
- Graphical AbstractDocument2 pagesGraphical Abstractdebasishmee5808No ratings yet
- Control System - I: Weekly Lesson PlanDocument5 pagesControl System - I: Weekly Lesson Plandebasishmee5808No ratings yet
- Lec 2Document25 pagesLec 2debasishmee5808No ratings yet
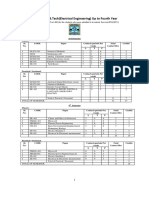
- Syllabus For B.Tech (Electrical Engineering) Up To Fourth YearDocument67 pagesSyllabus For B.Tech (Electrical Engineering) Up To Fourth YearDr. Kaushik MandalNo ratings yet
- Lec 2Document25 pagesLec 2debasishmee5808No ratings yet
- Lec 1Document18 pagesLec 1cavanzasNo ratings yet
- Best Practices of Report Writing Based On Study of Reports: Venue: India Habitat Centre, New DelhiDocument24 pagesBest Practices of Report Writing Based On Study of Reports: Venue: India Habitat Centre, New Delhidebasishmee5808No ratings yet
- 2 14 24Document11 pages2 14 24debasishmee5808No ratings yet
- Lec 1Document18 pagesLec 1cavanzasNo ratings yet
- Comparison Between Integer Order and Fractional Order ControllersDocument6 pagesComparison Between Integer Order and Fractional Order Controllersdebasishmee5808No ratings yet
- Time ManagementDocument19 pagesTime ManagementShyam_Nair_9667No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Fayol's 14 Principles in Action at McDonald'sDocument51 pagesFayol's 14 Principles in Action at McDonald'sVaibhav Gupta90% (10)
- Why You Should Never Support Voting in The Democratic ProcessDocument2 pagesWhy You Should Never Support Voting in The Democratic Processapi-171403368No ratings yet
- Section 1.1 Matrix Multiplication, Flop Counts and Block (Partitioned) MatricesDocument4 pagesSection 1.1 Matrix Multiplication, Flop Counts and Block (Partitioned) MatricesMococo CatNo ratings yet
- Half Real Video Games Between Real RulesDocument20 pagesHalf Real Video Games Between Real RulesIkiteiru UkitNo ratings yet
- Final Demo Lesson Plan in MAPEH 9Document10 pagesFinal Demo Lesson Plan in MAPEH 9Giezelle Leopando100% (4)
- CIFOR, Marika Et Stacy WOOD. Critical Feminisms in The Archives PDFDocument27 pagesCIFOR, Marika Et Stacy WOOD. Critical Feminisms in The Archives PDFAnonymous 59RRzvNo ratings yet
- Mind Map Modul 6 Learning Activity 4 Discussion TextsDocument1 pageMind Map Modul 6 Learning Activity 4 Discussion TextsIyut PitrianyNo ratings yet
- SemioticsDocument3 pagesSemioticsapi-3701311100% (2)
- 7 Forbidden Words That Trigger Female ObsessionDocument22 pages7 Forbidden Words That Trigger Female ObsessionTy Ler Durden82% (17)
- Ed 82-Facilitating Learning Midterm ExaminationDocument3 pagesEd 82-Facilitating Learning Midterm ExaminationMarc Augustine Bello SunicoNo ratings yet
- Rubric For Oral PresentationDocument1 pageRubric For Oral PresentationJamoi Ray VedastoNo ratings yet
- Furman - The Walkability of ArchitectureDocument16 pagesFurman - The Walkability of Architecturealina126100% (1)
- Exhibits For The Analysis of Behavior A Program For Self-InstructionDocument23 pagesExhibits For The Analysis of Behavior A Program For Self-InstructionGary KatzNo ratings yet
- Lecture19 Faraday's Law Induction Lenz's Law Generators Motional EmfDocument76 pagesLecture19 Faraday's Law Induction Lenz's Law Generators Motional EmfTaqi ShahNo ratings yet
- Ask and It Is Given PDFDocument134 pagesAsk and It Is Given PDFhoangneanh256No ratings yet
- The Monastic LifeDocument7 pagesThe Monastic Lifesihastriaputnei9630No ratings yet
- 2nd Year Modern Prose Chapter#1-4Document7 pages2nd Year Modern Prose Chapter#1-4KanwalNo ratings yet
- 12b. Sezer PDFDocument11 pages12b. Sezer PDFafiqah13No ratings yet
- The Role of The Serbian Orthodox Church in The Protection of Minorities and 'Minor' Religious Communities in The FR YugoslaviaDocument8 pagesThe Role of The Serbian Orthodox Church in The Protection of Minorities and 'Minor' Religious Communities in The FR YugoslaviaDomagoj VolarevicNo ratings yet
- Most Common Research Questions Being Asked by PanelistDocument27 pagesMost Common Research Questions Being Asked by PanelistRexMichael1226No ratings yet
- Interlinear ProvérbiosDocument250 pagesInterlinear ProvérbiosSimone smsgNo ratings yet
- Introduction to Random ProcessesDocument61 pagesIntroduction to Random Processesfouzia_qNo ratings yet
- 08 - A Theological Intro To MarriageDocument4 pages08 - A Theological Intro To MarriageJohn Paolo MirandaNo ratings yet
- What Is Ethics?: and Why Is It Important?Document17 pagesWhat Is Ethics?: and Why Is It Important?kaspar4No ratings yet
- God Wrote A Book John PiperDocument3 pagesGod Wrote A Book John PiperStephanieNo ratings yet
- A Separate Peace Teacher GuideDocument44 pagesA Separate Peace Teacher GuideSwagat Sukumar Sahoo100% (3)
- Human Resources Conference Paper AbstractsDocument67 pagesHuman Resources Conference Paper Abstractssiddhartha venkata tNo ratings yet
- Stokes TheoremDocument23 pagesStokes Theoremwebcam178843No ratings yet
- Secrets of SSBDocument19 pagesSecrets of SSBAtomyt0% (1)
- Đề Luyện Số 9Document10 pagesĐề Luyện Số 9Loan Vũ100% (1)