You might also like
- Stepper & Servo: Pros & Cons: Drawing Courtesy of National InstrumentsDocument5 pagesStepper & Servo: Pros & Cons: Drawing Courtesy of National Instrumentsmvcky2008No ratings yet
- An Extensive Look On Servo and Stepper MotorDocument12 pagesAn Extensive Look On Servo and Stepper MotorsajhfhfsjaNo ratings yet
- 5.differences Between Servo Motor and Stepper MotorDocument1 page5.differences Between Servo Motor and Stepper MotorSaurabh SahaNo ratings yet
- System Basics: Delta Precision Motors LTDDocument10 pagesSystem Basics: Delta Precision Motors LTDnycknikkiNo ratings yet
- Joystick Control of Stepper Motor Using ArduinoDocument7 pagesJoystick Control of Stepper Motor Using ArduinoDany Mathew100% (2)
- Mechatronics Lab Assignment: Servo MotorsDocument3 pagesMechatronics Lab Assignment: Servo MotorsNavendu GuptaNo ratings yet
- Whats A Servo?: (Click On Picture For Larger View)Document8 pagesWhats A Servo?: (Click On Picture For Larger View)Dhana SingarajaNo ratings yet
- Paso A Paso General de La Tecnología de AccionamientoDocument8 pagesPaso A Paso General de La Tecnología de AccionamientoVerónica RosasNo ratings yet
- What is a Servo Motor? Everything You Need to Know in 38 CharactersDocument15 pagesWhat is a Servo Motor? Everything You Need to Know in 38 CharactersShivshankar GhugeNo ratings yet
- Stepper Motors Servos: Reported By: Dionaldo, Shiela Mae GDocument11 pagesStepper Motors Servos: Reported By: Dionaldo, Shiela Mae GShiela Mae DionaldoNo ratings yet
- Introduction to Motion Control TechnologiesDocument4 pagesIntroduction to Motion Control TechnologiesKhadija RvNo ratings yet
- Motor Passo A Passo InfoDocument37 pagesMotor Passo A Passo InfojpncorreiaNo ratings yet
- Everything about Servo MotorsDocument31 pagesEverything about Servo Motorsadiamiru25% (4)
- Flux-Vector DriveDocument58 pagesFlux-Vector DrivePablo LimachiNo ratings yet
- Stepper MotorDocument11 pagesStepper MotorhaaenNo ratings yet
- Differences Between Stepper Motors and Servo MotorsDocument1 pageDifferences Between Stepper Motors and Servo MotorsazharzebNo ratings yet
- What is a Stepper Motor GuideDocument2 pagesWhat is a Stepper Motor GuideAnonymous MAit3mlYmNo ratings yet
- What Is A Stepper Motor?Document2 pagesWhat Is A Stepper Motor?Anonymous MAit3mlYmNo ratings yet
- Understanding Servo MotorsDocument103 pagesUnderstanding Servo MotorsQasir NawazNo ratings yet
- Servo Motor Literature ReviewDocument8 pagesServo Motor Literature Reviewc5swkkcn100% (1)
- Motors Convert Electric Energy To Mechanical MotionDocument9 pagesMotors Convert Electric Energy To Mechanical MotionwissamhijaziNo ratings yet
- Stepper Stepper Motors 20120301 - Stepper Motors Versus Servo MotorsDocument2 pagesStepper Stepper Motors 20120301 - Stepper Motors Versus Servo Motorsash1968No ratings yet
- Servo MotorsDocument8 pagesServo MotorsFairos ZakariahNo ratings yet
- Answer For QuestionDocument4 pagesAnswer For QuestionMohd AmerNo ratings yet
- Servo Motor Guide: Types, Construction & ApplicationsDocument7 pagesServo Motor Guide: Types, Construction & ApplicationsAHMED YOUSEFNo ratings yet
- DC Motors, Stepper Motors, and Servo Motors ExplainedDocument8 pagesDC Motors, Stepper Motors, and Servo Motors ExplainedSoumen BanerjeeNo ratings yet
- Servo Motor: Diagram, Definition, Types, Working & ApplicationsDocument8 pagesServo Motor: Diagram, Definition, Types, Working & ApplicationsMd Samee MNo ratings yet
- Servo MotorDocument4 pagesServo MotorWasil BabarNo ratings yet
- Theory AC ServmDocument2 pagesTheory AC ServmKaustubh DesaiNo ratings yet
- Q4 Electro Stepper and Servo (Research)Document2 pagesQ4 Electro Stepper and Servo (Research)Kim SalvadorNo ratings yet
- What Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorDocument11 pagesWhat Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorThe-kiros HadushNo ratings yet
- Kaizen - Motor Selection GuideDocument10 pagesKaizen - Motor Selection GuideKarrar HussainNo ratings yet
- Robot Drive Systems and End Effectors GuideDocument84 pagesRobot Drive Systems and End Effectors GuideSatheesh KumarNo ratings yet
- Unit-II: Robot Drive Systems and End EffectorsDocument81 pagesUnit-II: Robot Drive Systems and End EffectorsSatheesh KumarNo ratings yet
- Bthesis IIDocument93 pagesBthesis IIArun Kumar YadavNo ratings yet
- Stepper MotorDocument18 pagesStepper MotorGanesh Pingle100% (1)
- Unit Ii PDFDocument17 pagesUnit Ii PDFManojKumar MNo ratings yet
- Kaizen - Motor Selection GuideDocument11 pagesKaizen - Motor Selection GuideAmory Sabri AsmaroNo ratings yet
- BLDC MOTOR and Its ControllerDocument6 pagesBLDC MOTOR and Its ControllerManmeetSinghNo ratings yet
- Unit III SPMDocument65 pagesUnit III SPMMukesh KatoleNo ratings yet
- AC Variable SpeedDocument7 pagesAC Variable SpeedTabish AnwarNo ratings yet
- Servo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SDocument27 pagesServo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SThameem AbbasNo ratings yet
- How Do Servo Motors Work: This Little Motor Is High in Efficiency and PowerDocument8 pagesHow Do Servo Motors Work: This Little Motor Is High in Efficiency and PowerSubham GhoshNo ratings yet
- Servomotor: Servo MotorDocument4 pagesServomotor: Servo MotorAngel AventedorNo ratings yet
- VFD PDFDocument16 pagesVFD PDFMatthieuNo ratings yet
- View PDFDocument6 pagesView PDFpradeep.esg8068No ratings yet
- Brushless DC Electric Motor: Fundamentals of OperationDocument12 pagesBrushless DC Electric Motor: Fundamentals of OperationRaffi SkNo ratings yet
- Servo Motors vs. DC Stepper What Is DifferenceDocument12 pagesServo Motors vs. DC Stepper What Is DifferencejackNo ratings yet
- Ac & Servo DrivesDocument11 pagesAc & Servo DrivesSPD SMS2 ElectricalNo ratings yet
- Analyze Stepper Motor and Drives - CompleteDocument79 pagesAnalyze Stepper Motor and Drives - CompleteAnonymous DjWqKpZ1No ratings yet
- All About Stepper MotorsDocument28 pagesAll About Stepper MotorsPrasanth100% (1)
- Unit 5Document30 pagesUnit 5kruthikaNo ratings yet
- DifferenceDocument3 pagesDifferencemoh300No ratings yet
- Galco Tech Tips - Motor Control Selection GuideDocument2 pagesGalco Tech Tips - Motor Control Selection GuideGalco IndustrialNo ratings yet
- Efficient AC Drives: Yaskawa Electric America, IncDocument4 pagesEfficient AC Drives: Yaskawa Electric America, IncRajashekar LokamNo ratings yet
- SRD-vehicle Traction Applications PDFDocument20 pagesSRD-vehicle Traction Applications PDFEduardo BittencourtNo ratings yet
- How It Works: How Servo Motors WorkDocument2 pagesHow It Works: How Servo Motors WorkChirkov Kire100% (1)
- Marine Electrics Made Simple or How to Keep the Batteries ChargedFrom EverandMarine Electrics Made Simple or How to Keep the Batteries ChargedNo ratings yet
- Standards & Practices - Signalling and TelecommunicationDocument72 pagesStandards & Practices - Signalling and Telecommunicationjashobanta_sahooNo ratings yet
- Projects in ElectronicsDocument216 pagesProjects in ElectronicsSathiya Moorthy C A92% (39)
- Standards & Practices - Signalling and TelecommunicationDocument72 pagesStandards & Practices - Signalling and Telecommunicationjashobanta_sahooNo ratings yet
- Lithium Cell and Battery Test Summary: New Rule and Long TransitionDocument2 pagesLithium Cell and Battery Test Summary: New Rule and Long TransitionEhab MohamedNo ratings yet
- CRT TV Repair Course by Humphrey-PreviewDocument33 pagesCRT TV Repair Course by Humphrey-PreviewRichard Bermal Magalona76% (25)
- Of The Nuclear Safety Standards Commission (KTA)Document41 pagesOf The Nuclear Safety Standards Commission (KTA)Ehab MohamedNo ratings yet
- Types of Lithium-Ion Batteries - Battery UniversityDocument27 pagesTypes of Lithium-Ion Batteries - Battery UniversityEhab MohamedNo ratings yet
- 5758df29-3039-4129-b78d-593ce186cc68Document137 pages5758df29-3039-4129-b78d-593ce186cc68volvarosNo ratings yet
- Printed ElectrDocument146 pagesPrinted ElectrEhab MohamedNo ratings yet
- Mkotion ControlDocument97 pagesMkotion ControlEhab MohamedNo ratings yet
- How Do You Tell If A Lithium Ion Battery Is Bad PDFDocument1 pageHow Do You Tell If A Lithium Ion Battery Is Bad PDFEhab MohamedNo ratings yet
- Charging TechniquesDocument14 pagesCharging TechniquesEhab MohamedNo ratings yet
- Catalog RASOMA - FZSengl 2014 - 2 PDFDocument2 pagesCatalog RASOMA - FZSengl 2014 - 2 PDFEhab MohamedNo ratings yet
- Lithium Ion Based Rechargeable Energy Storage System (RESS) Safety Performance Measurement in Automotive Applications Test Plan Phillip A. GorneyDocument5 pagesLithium Ion Based Rechargeable Energy Storage System (RESS) Safety Performance Measurement in Automotive Applications Test Plan Phillip A. GorneyEhab MohamedNo ratings yet
- CCTV Tech HBK - 0713 508Document66 pagesCCTV Tech HBK - 0713 508me11110% (1)
- Italian Study Guide PDFDocument32 pagesItalian Study Guide PDFPayam TamehNo ratings yet
- Page Description: Terminal PlatingDocument39 pagesPage Description: Terminal PlatingTan Bui100% (3)
- f1 - nd1 Servicing ManualDocument36 pagesf1 - nd1 Servicing ManualEhab MohamedNo ratings yet
- الانتحار الجماعيDocument732 pagesالانتحار الجماعيEhab MohamedNo ratings yet
- Idam RDDM de enDocument106 pagesIdam RDDM de enEhab MohamedNo ratings yet
- BMT Event 19033 PDFDocument4 pagesBMT Event 19033 PDFEhab MohamedNo ratings yet
- PD 25 Spec PDFDocument2 pagesPD 25 Spec PDFEhab MohamedNo ratings yet
- Iec61215 PDFDocument37 pagesIec61215 PDFpvamanNo ratings yet
- Chap009 PDFDocument33 pagesChap009 PDFEhab MohamedNo ratings yet
- Zero Return Problems Alarms and Troubleshooting CNC InformationDocument4 pagesZero Return Problems Alarms and Troubleshooting CNC InformationEhab MohamedNo ratings yet
- Learning The Dutch Language CompletedDocument22 pagesLearning The Dutch Language CompletedSandra Deaconu0% (1)
- 8 Qa-QcDocument17 pages8 Qa-QcEhab MohamedNo ratings yet
- Veritas CNC Technology White PaperDocument17 pagesVeritas CNC Technology White PaperEhab MohamedNo ratings yet
- Chapter 06Document29 pagesChapter 06Ehab MohamedNo ratings yet
- Kawasaki Manual 99924 2078 01Document181 pagesKawasaki Manual 99924 2078 01hobbsy55100% (2)
- DACOTA 97 AnDocument439 pagesDACOTA 97 AnRodrigo Antonio Cuevas Troncoso50% (2)
- Vanbenthuysen Adrian Nordhavn76Document53 pagesVanbenthuysen Adrian Nordhavn76api-299532402No ratings yet
- Pitch Regulated Wind Turbine With Optitip and OptispeedDocument6 pagesPitch Regulated Wind Turbine With Optitip and OptispeedBala Murugan100% (2)
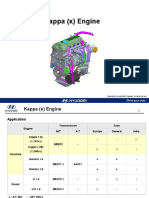
- PB Engine Kappa EngDocument15 pagesPB Engine Kappa EngMoaed Kanbar50% (2)
- Viper TP18WD - Owners ManualDocument13 pagesViper TP18WD - Owners ManualNestor Marquez-DiazNo ratings yet
- Machine Taper: Explanation Use TypesDocument12 pagesMachine Taper: Explanation Use TypesGanesh DixitNo ratings yet
- Southern Luzon State UniversityDocument4 pagesSouthern Luzon State Universityshadow friendNo ratings yet
- Gardner Denver - PZ9 PDFDocument7 pagesGardner Denver - PZ9 PDFMauricio Avila Trujillo100% (2)
- Pve19 21Document4 pagesPve19 21Hidraumaq componentes hidráulicosNo ratings yet
- Function Description Operation: G5X Operating and Maintenance Manual Main ShaftDocument7 pagesFunction Description Operation: G5X Operating and Maintenance Manual Main ShaftIbraHim RaGabNo ratings yet
- Recommended MaterialsDocument6 pagesRecommended MaterialspikipelukiNo ratings yet
- Monolithic Wheels With Steel Sheet Bracket For Medium-Heavy LoadsDocument1 pageMonolithic Wheels With Steel Sheet Bracket For Medium-Heavy LoadsEko PrastyoNo ratings yet
- Catálogo de Peças TR 6180 J PDFDocument652 pagesCatálogo de Peças TR 6180 J PDFBarra Nova Ferreira80% (15)
- CMP 2200 Product SheetDocument2 pagesCMP 2200 Product SheetOmero Austin0% (1)
- Choose Your Power Right: Highlander SeriesDocument1 pageChoose Your Power Right: Highlander SeriesFian -No ratings yet
- Hydraulic and Pneumatic ActuatorsDocument17 pagesHydraulic and Pneumatic ActuatorsKAMALJEET SINGHNo ratings yet
- Aop Gate Valve 1Document16 pagesAop Gate Valve 1claudio godinezNo ratings yet
- Chapter 3 Gas TurbineDocument120 pagesChapter 3 Gas TurbineGloria Del Carmen Muñoz100% (2)
- Telehandler TL943Document2 pagesTelehandler TL943humberto gomez zapataNo ratings yet
- Suspension AirlinerDocument21 pagesSuspension AirlinerAlexanderNo ratings yet
- Garelli Clymer ManualDocument121 pagesGarelli Clymer ManualLucas LorandiniNo ratings yet
- NL000006718-R1 04 PDFDocument94 pagesNL000006718-R1 04 PDFdidin ekoNo ratings yet
- Type 3510 1 and Type 3510 7 Pneumatic Control Valves Type 3510 Micro Flow ValveDocument12 pagesType 3510 1 and Type 3510 7 Pneumatic Control Valves Type 3510 Micro Flow Valvepaulo cesar f machadoNo ratings yet
- Renault Espace OTS4557A 1038Document6 pagesRenault Espace OTS4557A 1038fulcbonNo ratings yet
- Mech307 - 2015-16 Spring - Project - Larger FiguresDocument4 pagesMech307 - 2015-16 Spring - Project - Larger FiguresYazan HarbNo ratings yet
- Verti-G and CVG Quick Reference Guide - Rev B - 6499975 - 01Document44 pagesVerti-G and CVG Quick Reference Guide - Rev B - 6499975 - 01farhad iqbalNo ratings yet
- Parts Manual: 430F2 Center Pivot Backhoe LoaderDocument874 pagesParts Manual: 430F2 Center Pivot Backhoe LoaderJorge AlvarezNo ratings yet
- CASE 7 32621 PreviewDocument41 pagesCASE 7 32621 PreviewDiego Alejandro QuinteroNo ratings yet