You might also like
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachFrom EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachNo ratings yet
- Bibliography Report Quadrotor Control MethodsDocument47 pagesBibliography Report Quadrotor Control MethodsPablo Fernández de la Granja100% (2)
- Fast and High Precision Motor Control For High Performance Servo Drives PDFDocument8 pagesFast and High Precision Motor Control For High Performance Servo Drives PDFmotionNo ratings yet
- Analyzing Frequency Response of Inertial Mems PDFDocument5 pagesAnalyzing Frequency Response of Inertial Mems PDFYousef BilbeisiNo ratings yet
- PID-Controller Tuning Optimization With Genetic Algorithms in Servo SystemsDocument14 pagesPID-Controller Tuning Optimization With Genetic Algorithms in Servo SystemsAurel GSNo ratings yet
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryFrom EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryNo ratings yet
- Comparison of Windup Protection Schemes for PI and PID ControllersDocument61 pagesComparison of Windup Protection Schemes for PI and PID Controllersali jafarianNo ratings yet
- Implementation of Space Vector Pulse Width Modulation (SVPWM) For Three Phase Voltage Source Inverter Using Matlab Simulink - 24 PagesDocument24 pagesImplementation of Space Vector Pulse Width Modulation (SVPWM) For Three Phase Voltage Source Inverter Using Matlab Simulink - 24 PagesMohamed Nabil100% (1)
- Design of Tracking of Moving Target Using PID ControllerDocument4 pagesDesign of Tracking of Moving Target Using PID Controllerchoc_ngoayNo ratings yet
- ControlExperiments - Precision Modular ServoDocument43 pagesControlExperiments - Precision Modular ServoNachoSainzNo ratings yet
- Real-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using LabviewDocument6 pagesReal-Time DC Motor Position Control by Fuzzy Logic and PID Controllers Using Labviewvikalp guptaNo ratings yet
- Fundamentals of Mechatronics Short CourseDocument3 pagesFundamentals of Mechatronics Short CourseAamir Hasan KhanNo ratings yet
- 2018 - Design of Real-Time PID Tracking Controller Using Arduino Mega 2560for A Permanent Magnet DC Motor Under Real Disturbances.Document5 pages2018 - Design of Real-Time PID Tracking Controller Using Arduino Mega 2560for A Permanent Magnet DC Motor Under Real Disturbances.Sachin ShindeNo ratings yet
- Sliding Mode Control of DC MotorDocument5 pagesSliding Mode Control of DC MotorPham Quoc ThienNo ratings yet
- Fast and Subpixel Precise Blob Detection and AttributionDocument4 pagesFast and Subpixel Precise Blob Detection and AttributionFelix FergosenNo ratings yet
- QUESTION BANK of Control Systems Engineering PDFDocument12 pagesQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaNo ratings yet
- Force Feedback in MEMS Inertial SensorsDocument225 pagesForce Feedback in MEMS Inertial SensorsMohammad Elbadry100% (1)
- Time Delay SystemsDocument25 pagesTime Delay SystemsSamarendu BaulNo ratings yet
- Fuzzy Based Reconfigurable Controller For BLDC MotorDocument7 pagesFuzzy Based Reconfigurable Controller For BLDC MotorkandibanNo ratings yet
- TO Eliminate Common Mode Leakage Current IN Photovoltaic Grid Connected Power SystemDocument11 pagesTO Eliminate Common Mode Leakage Current IN Photovoltaic Grid Connected Power SystemLava KumarNo ratings yet
- Motion Detection in VideoDocument6 pagesMotion Detection in VideomandeepNo ratings yet
- Chapter 4 - InvertersDocument67 pagesChapter 4 - InvertersFarid NazriNo ratings yet
- SENSOR and Signal Processing UnitDocument57 pagesSENSOR and Signal Processing UnitRohit Ghulanavar100% (1)
- Fuzzy Gain Scheduling of PID Controllers PDFDocument7 pagesFuzzy Gain Scheduling of PID Controllers PDFMiguel ZeaNo ratings yet
- Active Power Factor Correction for Single Phase Full Bridge RectifierDocument6 pagesActive Power Factor Correction for Single Phase Full Bridge RectifierAnand KumarNo ratings yet
- Fault-Tolerant Control of An Octorotor Unmanned Aerial Vehicle Under Actuators FailuresDocument175 pagesFault-Tolerant Control of An Octorotor Unmanned Aerial Vehicle Under Actuators FailuresMNo ratings yet
- E1 AquinoDocument14 pagesE1 AquinoTrina Ritchell AquinoNo ratings yet
- Feedback Control System SyllabusDocument3 pagesFeedback Control System SyllabusDamanMakhijaNo ratings yet
- Lab 6Document12 pagesLab 6Sujan HeujuNo ratings yet
- Laser MetrologyDocument41 pagesLaser MetrologyjennybunnyomgNo ratings yet
- Control Systems IMP QUESTIONSDocument8 pagesControl Systems IMP QUESTIONSHarika HarikaNo ratings yet
- Adaptive Blind Noise Suppression in Some Speech Processing ApplicationsDocument5 pagesAdaptive Blind Noise Suppression in Some Speech Processing ApplicationsSai Swetha GNo ratings yet
- Mo Phong Matlab Ball and BeamDocument52 pagesMo Phong Matlab Ball and BeamHuong NguyenNo ratings yet
- Measurement of VelocityDocument59 pagesMeasurement of VelocityYogeshBhatt100% (1)
- 486 N20038 PDFDocument6 pages486 N20038 PDFguddu13481No ratings yet
- Digital Communication - CioffiDocument101 pagesDigital Communication - CioffiLuigi LuongoNo ratings yet
- System Realization: Unit-1Document34 pagesSystem Realization: Unit-1Jagdeep RahulNo ratings yet
- Measurements and InstrumentationDocument54 pagesMeasurements and InstrumentationVikas PsNo ratings yet
- Detection and Tracking Algorithms For IRSTDocument9 pagesDetection and Tracking Algorithms For IRSThimajagarimellaNo ratings yet
- Introduction To Control SystemsDocument28 pagesIntroduction To Control SystemsAK MizanNo ratings yet
- CMG Gimbal Actuator Design for 1000 ft-lb-sec MomentDocument239 pagesCMG Gimbal Actuator Design for 1000 ft-lb-sec MomentBNo ratings yet
- Mechatronic Sensor and Actuator SystemsDocument1 pageMechatronic Sensor and Actuator SystemscakarenesNo ratings yet
- Advanced State Observer DesignDocument11 pagesAdvanced State Observer DesignNileshNo ratings yet
- Modeling and Position Control of Mobile RobotDocument6 pagesModeling and Position Control of Mobile RobotAmin EslamiNo ratings yet
- Speed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationDocument5 pagesSpeed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationSofyan AhmadiNo ratings yet
- Design and Implementation Speed Control System of PDFDocument8 pagesDesign and Implementation Speed Control System of PDFvince kafuaNo ratings yet
- Basic Concept For Electrical DesigningDocument2 pagesBasic Concept For Electrical DesigningJoel RemegioNo ratings yet
- Object DetectionDocument7 pagesObject DetectionJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Fuzzy Logic Control of Three Phase Induction Motor: A ReviewDocument3 pagesFuzzy Logic Control of Three Phase Induction Motor: A ReviewInternational Journal of Innovative Science and Research Technology100% (1)
- X-Y Recorder - The Web's Where You Study In!Document3 pagesX-Y Recorder - The Web's Where You Study In!Srihari KilaruNo ratings yet
- Mathematical Model of Inverted Pendulum SystemDocument18 pagesMathematical Model of Inverted Pendulum SystemMajid Mehmood100% (1)
- Time Domain Based Digital PWM Controller For DC-DC ConverterDocument12 pagesTime Domain Based Digital PWM Controller For DC-DC ConverterTetiHidayatiNo ratings yet
- Motion Estimation TechniquesDocument4 pagesMotion Estimation Techniqueschandra sekharNo ratings yet
- Analysis of Non-Isolated Bidirectional DC-DC Converter With ZVSDocument7 pagesAnalysis of Non-Isolated Bidirectional DC-DC Converter With ZVSAnuja VargheseNo ratings yet
- Ec2034 TV PDFDocument171 pagesEc2034 TV PDFHrishikesh Deshpande100% (3)
- Modeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID Controller PDFDocument6 pagesModeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID Controller PDFFaisal Khan JadoonNo ratings yet
- Pe Tutorial 6 PDFDocument12 pagesPe Tutorial 6 PDFkibrom atsbhaNo ratings yet
- DC Motor Speed ControlDocument24 pagesDC Motor Speed ControlSumu Talal50% (2)
- BrainGizer BookDocument102 pagesBrainGizer BookRania NabilNo ratings yet
- GT B2710Document90 pagesGT B2710s12originalNo ratings yet
- PSU ManualDocument23 pagesPSU Manuals12original100% (1)
- Tomoe - Rubber Seated Butterfly Valve 700s SeriesDocument8 pagesTomoe - Rubber Seated Butterfly Valve 700s Seriess12originalNo ratings yet
- Effects of Pulsed Electromagnetic Field Frequencies On The Osteogenic Differentiation of Human Mesenchymal Stem CellsDocument6 pagesEffects of Pulsed Electromagnetic Field Frequencies On The Osteogenic Differentiation of Human Mesenchymal Stem Cellss12originalNo ratings yet
- Induction Vs Permanent Magnet MotorsDocument150 pagesInduction Vs Permanent Magnet MotorsRomulo AlvarezNo ratings yet
- Spraying PaintDocument4 pagesSpraying PaintApollyonNo ratings yet
- Before The Lights Go Out: A Survey of EMP Preparedness Reveals Significant ShortfallsDocument15 pagesBefore The Lights Go Out: A Survey of EMP Preparedness Reveals Significant Shortfallss12originalNo ratings yet
- Portable Welding MachineDocument2 pagesPortable Welding Machines12originalNo ratings yet
- Grundfosliterature 5260965Document2 pagesGrundfosliterature 5260965s12originalNo ratings yet
- Attracting Birds PDFDocument4 pagesAttracting Birds PDFinno_cence28No ratings yet
- Multimeter MS8268Document18 pagesMultimeter MS8268s12originalNo ratings yet
- Sa02607001e PDFDocument24 pagesSa02607001e PDFGayashan KulathungaNo ratings yet
- Model 137B22B ICP® Pressure Sensor Installation and Operating ManualDocument9 pagesModel 137B22B ICP® Pressure Sensor Installation and Operating Manuals12originalNo ratings yet
- Biomhxanike™ E°Kata™Ta™Ei™ Y O™Ta Moi: A' Teyxo™Document8 pagesBiomhxanike™ E°Kata™Ta™Ei™ Y O™Ta Moi: A' Teyxo™s12originalNo ratings yet
- Add A RadiatorDocument6 pagesAdd A RadiatormickyalemuNo ratings yet
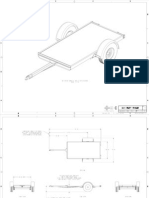
- 4x8 Utility Trailer Assembly Drawings and DiagramsDocument18 pages4x8 Utility Trailer Assembly Drawings and Diagramscualete100% (1)
- All Time Favorite Electronic ProjectsDocument116 pagesAll Time Favorite Electronic Projectss12originalNo ratings yet
- CB Eprom Data BookDocument65 pagesCB Eprom Data Books12original100% (2)
- Target103 Grid Black Corners PDFDocument1 pageTarget103 Grid Black Corners PDFs12originalNo ratings yet
- 100 New Inventions (Tell Me Why #117)Document99 pages100 New Inventions (Tell Me Why #117)s12original50% (2)
- AP040061E Bearing Currents PBWDocument5 pagesAP040061E Bearing Currents PBWÁrthur LimaNo ratings yet
- Bearing Currents and VsdsDocument9 pagesBearing Currents and Vsdsarindam banerjeeNo ratings yet
- The Art of ShootingDocument164 pagesThe Art of Shootingcharlie20377240100% (1)
- Facts Worth Knowing About Frequency ConvertersDocument167 pagesFacts Worth Knowing About Frequency ConvertersEduardo SuarezNo ratings yet
- Guerrilla Science - Survival Strategies of A Cuban PhysicistDocument153 pagesGuerrilla Science - Survival Strategies of A Cuban Physicists12originalNo ratings yet
- Stitching For BeginnersDocument164 pagesStitching For Beginnerss12original100% (9)
- Flow Sensor Technical Guide BookDocument20 pagesFlow Sensor Technical Guide Books12originalNo ratings yet
- Hunting and Fishing CookbookDocument196 pagesHunting and Fishing Cookbookex247No ratings yet
- Ceramics For Beginners - Hand BuildingDocument128 pagesCeramics For Beginners - Hand Buildingmilancebre100% (6)
- The Art of TsukamakiDocument9 pagesThe Art of TsukamakiGrimm Cao100% (3)
- Casalla vs. PeopleDocument2 pagesCasalla vs. PeopleJoan Eunise FernandezNo ratings yet
- Lecture 22 NDocument6 pagesLecture 22 Ncau toanNo ratings yet
- Learning Disabilities in The ClassroomDocument5 pagesLearning Disabilities in The ClassroomekielaszekNo ratings yet
- 99 Apache Spark Interview Questions For Professionals PDF - Google SearchDocument2 pages99 Apache Spark Interview Questions For Professionals PDF - Google SearchCsvv VardhanNo ratings yet
- Case Epidural HematomaDocument16 pagesCase Epidural HematomaBahRunNo ratings yet
- Zen and The Art of Trumpet Play - Mark Van CleaveDocument55 pagesZen and The Art of Trumpet Play - Mark Van Cleavesz.sledz100% (1)
- Chapter 3 - Risk and ReturnDocument67 pagesChapter 3 - Risk and ReturnPhuonganh LeNo ratings yet
- Commercial Bank of Africa Market ResearchDocument27 pagesCommercial Bank of Africa Market Researchprince185No ratings yet
- DefenseDocument20 pagesDefenseManny De MesaNo ratings yet
- Application for Test Engineer PositionDocument3 pagesApplication for Test Engineer PositionAsz WaNieNo ratings yet
- Fathers House MansionsDocument3 pagesFathers House Mansionswilf12100% (1)
- Bobby Joe Public NoticeDocument3 pagesBobby Joe Public NoticeUpscale International InvestmentsNo ratings yet
- Field Study 2 Ep. 5 AnswerDocument10 pagesField Study 2 Ep. 5 AnswerShane Via CainticNo ratings yet
- Analysis and Design of Circular Beams-2017Document49 pagesAnalysis and Design of Circular Beams-2017Ragheb Ibrahim0% (1)
- The Septuagint A Critical AnalysisDocument76 pagesThe Septuagint A Critical AnalysisscaunasNo ratings yet
- Lynn Hunt - Writing History in The Global Era-W.W. Norton & Company (2014)Document83 pagesLynn Hunt - Writing History in The Global Era-W.W. Norton & Company (2014)Ricardo Valenzuela100% (2)
- Vegetation of PakistanDocument10 pagesVegetation of PakistanAhmad sadiqNo ratings yet
- Flowera, Fruits and SeedsDocument66 pagesFlowera, Fruits and SeedsNikkaMontil100% (1)
- Almeda v. CaDocument10 pagesAlmeda v. CaRuss TuazonNo ratings yet
- A.T Jones-Great Empires of Prophecy From Babylon To The Fall of RomeDocument640 pagesA.T Jones-Great Empires of Prophecy From Babylon To The Fall of RomeDANTZIE100% (2)
- GATE Instrumentation Engineering Solved 2013Document22 pagesGATE Instrumentation Engineering Solved 2013Meghraj ChiniyaNo ratings yet
- The Loner-Staying Clean in IsolationDocument4 pagesThe Loner-Staying Clean in Isolationgemgirl6686No ratings yet
- Defence TC 15Document30 pagesDefence TC 15Simran AroraNo ratings yet
- Two Sides of Effective Oral CommunicationDocument17 pagesTwo Sides of Effective Oral CommunicationSharath KumarNo ratings yet
- Alpha To Omega PPT (David & Krishna)Document11 pagesAlpha To Omega PPT (David & Krishna)gsdrfwpfd2No ratings yet
- HI6025 Assignment T3, 2016Document3 pagesHI6025 Assignment T3, 2016Abeer ArifNo ratings yet
- Chapter 8 SQL Complex QueriesDocument51 pagesChapter 8 SQL Complex QueriesJiawei TanNo ratings yet
- Module 1 Sociological PerspectivesDocument39 pagesModule 1 Sociological PerspectivesCristine BalocaNo ratings yet
- Indra NooyiDocument2 pagesIndra NooyiMohan VamsiNo ratings yet