You might also like
- The Cruelest Month - Edmund Fitzgerald Newsweek, November 24, 1975Document1 pageThe Cruelest Month - Edmund Fitzgerald Newsweek, November 24, 1975MickBurke100% (8)
- Port Agency 2014Document3 pagesPort Agency 2014Deepak Shori100% (1)
- Nautical CroatiaDocument85 pagesNautical CroatiaHrvoje RoksandicNo ratings yet
- DTS - Ship Const & StabDocument12 pagesDTS - Ship Const & StabYASHKAR VERMA100% (2)
- SD 1.3.2 Cost EstimateDocument29 pagesSD 1.3.2 Cost EstimatelavkeshNo ratings yet
- Module 24 Damage StabilityDocument9 pagesModule 24 Damage StabilitySippu SifathullahNo ratings yet
- Luv Sharma Oral Report Tynedock - Capt Jackson-2Document2 pagesLuv Sharma Oral Report Tynedock - Capt Jackson-2sergiy100% (2)
- User Guide: Siemens PLM SoftwareDocument32 pagesUser Guide: Siemens PLM Softwareabc123go100% (1)
- 14000 TEU container ship benchmark dataDocument15 pages14000 TEU container ship benchmark dataChahbi RamziNo ratings yet
- Ship Resistance ComponentsDocument11 pagesShip Resistance Componentssupriadi90315No ratings yet
- 2014 04 Guidance For Accurate Draft ReadingDocument2 pages2014 04 Guidance For Accurate Draft ReadingBryant Cuison100% (1)
- STA Article 30jan2013 PDFDocument11 pagesSTA Article 30jan2013 PDFpriyoNo ratings yet
- Bunker Calculation Excel SheetDocument1 pageBunker Calculation Excel SheetJay Narayan TiwariNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- 2nd Matet QN Pprs Till Jan 20 PG 57Document194 pages2nd Matet QN Pprs Till Jan 20 PG 57Devanshu SharmaNo ratings yet
- 01-NAC-Introduction To Ship Stability (160419)Document40 pages01-NAC-Introduction To Ship Stability (160419)MuhammadIlhamNugroho100% (1)
- Naval Architect Briefing on Ship Reference LinesDocument34 pagesNaval Architect Briefing on Ship Reference LinessufianNo ratings yet
- Optimoor: Mooring Analysis So Ware For Ships & BargesDocument2 pagesOptimoor: Mooring Analysis So Ware For Ships & BargesTam Jun HuiNo ratings yet
- Voyage PlanningDocument21 pagesVoyage PlanningmentepositivaNo ratings yet
- Flooding Checklist - Attachment XLDocument2 pagesFlooding Checklist - Attachment XLFaiqah AzmirNo ratings yet
- Capt. K K Sharma 1st Mate Orals SetDocument7 pagesCapt. K K Sharma 1st Mate Orals SetPrateek Gandhi0% (1)
- Ballast CalculationDocument18 pagesBallast Calculationmyusuf_engineerNo ratings yet
- Wet Damage On Bulk Carriers: With You at All TimesDocument32 pagesWet Damage On Bulk Carriers: With You at All TimesDerfliw John Valenzuela Gayanoche100% (1)
- Seakeeping and Operability AnalysisDocument2 pagesSeakeeping and Operability AnalysisTullio OpattiNo ratings yet
- We Didn't Mean To Go To Sea by Arthur RansomeDocument1 pageWe Didn't Mean To Go To Sea by Arthur RansomeleeNo ratings yet
- Lashing and Securing Deck CargoesDocument27 pagesLashing and Securing Deck CargoesSaurabh Vishwakarma100% (1)
- SEA AXE DENGE VE YÜZEBİLİRLİK HESAPLARIDocument7 pagesSEA AXE DENGE VE YÜZEBİLİRLİK HESAPLARIyunus ahmet ilhanNo ratings yet
- Stowage FactorsDocument64 pagesStowage FactorsOcean going master Cpt. batuNo ratings yet
- The K.u.K. Kriegsmarine and The Austro-Hungarian Naval-Industrial ComplexDocument9 pagesThe K.u.K. Kriegsmarine and The Austro-Hungarian Naval-Industrial ComplexSamuel Gompers100% (1)
- Stability Intact & Trim Cat 17mDocument37 pagesStability Intact & Trim Cat 17mRomie Harie100% (2)
- Bulk Cargo Measurement GuideDocument18 pagesBulk Cargo Measurement GuideHRodas EcNo ratings yet
- Inverse Draft Survey GuideDocument9 pagesInverse Draft Survey GuideRadney BallentosNo ratings yet
- Predicting The Slamming Force On The HullDocument52 pagesPredicting The Slamming Force On The HullEgwuatu UchennaNo ratings yet
- Tank Capacity & Payload CalculationDocument22 pagesTank Capacity & Payload Calculationsidan magnaNo ratings yet
- Rules For The Classification of Trimarans PDFDocument112 pagesRules For The Classification of Trimarans PDFaminNo ratings yet
- GL Bulk Carrier Structures eDocument102 pagesGL Bulk Carrier Structures evdevivNo ratings yet
- Leading Marine Service Provider for Suez Canal TransitDocument218 pagesLeading Marine Service Provider for Suez Canal TransitAndrei Zaha0% (1)
- The Technical University of Norway: Norwegian Ship Model Experiment TankDocument56 pagesThe Technical University of Norway: Norwegian Ship Model Experiment TankDeepak PooranachandranNo ratings yet
- Dynamic Analysis of Multiple Body Floating Platforms Coupled With Mooring Lines and ReisersDocument223 pagesDynamic Analysis of Multiple Body Floating Platforms Coupled With Mooring Lines and ReisersYoungtae KimNo ratings yet
- ENGR 4011 Resistance & Propulsion of Ships Assignment 3: 2018Document5 pagesENGR 4011 Resistance & Propulsion of Ships Assignment 3: 2018Luis De GraciaNo ratings yet
- Mandatory Emergency Towing Systems in Ships Other Than Tankers of Not Less Than 20,000 DWTDocument6 pagesMandatory Emergency Towing Systems in Ships Other Than Tankers of Not Less Than 20,000 DWTnawanNo ratings yet
- National Cargo Bureau, Inc.: Grain Stability Calculation FormDocument8 pagesNational Cargo Bureau, Inc.: Grain Stability Calculation FormRybak OleksandrNo ratings yet
- Ship Construction 2ND MatesDocument2 pagesShip Construction 2ND Matessureen123No ratings yet
- Optimized Design For TSHDs Swell CompensatorDocument13 pagesOptimized Design For TSHDs Swell CompensatorTomasz FelknerNo ratings yet
- ROPAX ESTONIA: Stockholm Agreement Past, Present, FutureDocument34 pagesROPAX ESTONIA: Stockholm Agreement Past, Present, Futuregnd100No ratings yet
- Resistance of ShipDocument10 pagesResistance of ShipBethadio RizkyNo ratings yet
- Intact StabilityDocument1 pageIntact StabilityislimaNo ratings yet
- Amends To SDs 2011Document214 pagesAmends To SDs 2011duaankushNo ratings yet
- Load and Stability Manual GuideDocument22 pagesLoad and Stability Manual GuidepuddisaaliNo ratings yet
- SOLAS Chapter II-1 Subdivision and Damage Stability Regulations ExplainedDocument35 pagesSOLAS Chapter II-1 Subdivision and Damage Stability Regulations ExplainedWong Yong WaiNo ratings yet
- IMO Grain Code Stability RequirementsDocument2 pagesIMO Grain Code Stability RequirementsRakesh EdekkadNo ratings yet
- Gomo Ukcs SupplementDocument26 pagesGomo Ukcs SupplementAhmad ImranNo ratings yet
- Guide Questionnaires OIC NW1 NEWDocument446 pagesGuide Questionnaires OIC NW1 NEWKenneth Marcial Paul TañadaNo ratings yet
- ISM Code DOC Checklist For Interim Certification 2021 01Document6 pagesISM Code DOC Checklist For Interim Certification 2021 01Meike berederungNo ratings yet
- Ship resistance and propulsion calculations using Guldhammer-Harvald and Holtrop methodsDocument27 pagesShip resistance and propulsion calculations using Guldhammer-Harvald and Holtrop methodsSiskal DdNo ratings yet
- Shallow Water Resistance Charts For Preliminary Vessel DesignDocument18 pagesShallow Water Resistance Charts For Preliminary Vessel DesignshahjadaNo ratings yet
- Buy 4.5 M Rubberised Inflatable Boat (Rescue Boats) Online - GeMDocument10 pagesBuy 4.5 M Rubberised Inflatable Boat (Rescue Boats) Online - GeMCO2DNU NCCNo ratings yet
- Yokohama FENDER PRODUCT LITERATURE PDFDocument8 pagesYokohama FENDER PRODUCT LITERATURE PDFitaaliyenNo ratings yet
- The Shipping Law Blog: A Visual Guide To Tug Boat TypesDocument16 pagesThe Shipping Law Blog: A Visual Guide To Tug Boat TypesKevin de ArmasNo ratings yet
- Naval Architecture Paper IDocument1 pageNaval Architecture Paper Ipramodkb_cusatNo ratings yet
- Volume IIIDocument1,145 pagesVolume IIIathanasios niotisNo ratings yet
- Model Questions and Answers On Marine Hydrodynamics by T. Sahoo Dept. of Ocean Engineering and Naval Architecture, IIT, Kharagpur, INDIADocument60 pagesModel Questions and Answers On Marine Hydrodynamics by T. Sahoo Dept. of Ocean Engineering and Naval Architecture, IIT, Kharagpur, INDIAbrian5412No ratings yet
- Nera II - Sopep ChecklistDocument1 pageNera II - Sopep Checklistdiegocely700615No ratings yet
- B) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsDocument6 pagesB) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsCezar100% (1)
- E04-Ship Geometry & Hydrostatic CalculationsDocument2 pagesE04-Ship Geometry & Hydrostatic Calculationsarise tettehNo ratings yet
- wgftfb10 PDFDocument252 pageswgftfb10 PDFdutvaNo ratings yet
- CO Draught SurveysDocument39 pagesCO Draught SurveysrigelNo ratings yet
- STAB1975 GlasgowDocument477 pagesSTAB1975 GlasgowJuanPerez100% (1)
- CFD Assignment May 2017Document2 pagesCFD Assignment May 2017蒲俊雄No ratings yet
- Windship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985From EverandWindship Technology: Proceedings of the International Symposium on Windship Technology (WINDTECH ' 85), Southampton, U.K., April 24-25, 1985C SatchwellNo ratings yet
- Ihr Authorized Ports ListDocument104 pagesIhr Authorized Ports ListRadney BallentosNo ratings yet
- HOTEL101 Manila Floor Plan/Good InvestmentDocument4 pagesHOTEL101 Manila Floor Plan/Good InvestmentRadney BallentosNo ratings yet
- AIS EntryDocument2 pagesAIS EntryRadney BallentosNo ratings yet
- Imo SN Circ244 Ais UnlocodeDocument4 pagesImo SN Circ244 Ais UnlocodeRadney BallentosNo ratings yet
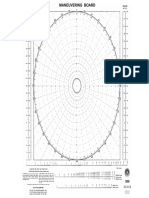
- RADAR Maneuvering BoardDocument1 pageRADAR Maneuvering BoardRadney Ballentos100% (1)
- City 2016 BrochureDocument12 pagesCity 2016 BrochureRadney BallentosNo ratings yet
- Stockquotes 6Document9 pagesStockquotes 6Radney BallentosNo ratings yet
- Avida Towers 2BRDocument1 pageAvida Towers 2BRRadney BallentosNo ratings yet
- Stockquotes 05202016Document8 pagesStockquotes 05202016Radney BallentosNo ratings yet
- 5th Gen Core Family Mobile BriefDocument10 pages5th Gen Core Family Mobile BriefVinayak ShindeNo ratings yet
- Optimizing PDFs in Adobe Acrobat Pro DCDocument9 pagesOptimizing PDFs in Adobe Acrobat Pro DCRadney BallentosNo ratings yet
- HAB Ship Guide eDocument95 pagesHAB Ship Guide esdNo ratings yet
- CMA CGM Ningbo ScheduleDocument203 pagesCMA CGM Ningbo ScheduleHenriqueNo ratings yet
- Bergen Rolls Royce Old ProductsDocument4 pagesBergen Rolls Royce Old ProductsHui ChenNo ratings yet
- Boating VocabularyDocument12 pagesBoating Vocabularyshbv1No ratings yet
- Midship ScantlingDocument1 pageMidship ScantlingMogan RajNo ratings yet
- Seafaring IdiomsDocument17 pagesSeafaring IdiomsEllena GNo ratings yet
- Get Job Id 1632875Document1 pageGet Job Id 1632875Arcel PalañaNo ratings yet
- 120 Ton Floating Crane and Accommodation Barge SpecsDocument1 page120 Ton Floating Crane and Accommodation Barge Specswaleed yehiaNo ratings yet
- Master (3000gt Yacht) Orals Report - 2023-09 - Keep - PassDocument2 pagesMaster (3000gt Yacht) Orals Report - 2023-09 - Keep - PassparvinderNo ratings yet
- Brunton Compass RC - USER - MANUAL - 8.8 - Update PDFDocument2 pagesBrunton Compass RC - USER - MANUAL - 8.8 - Update PDFBenjamin DoverNo ratings yet
- Docking and Undocking ReportDocument5 pagesDocking and Undocking ReportYarham SuaibNo ratings yet
- Ship To Ship Transfers: Port of GothenburgDocument54 pagesShip To Ship Transfers: Port of GothenburgfrancisNo ratings yet
- Geodetic Surveying Angles and DirectionsDocument28 pagesGeodetic Surveying Angles and DirectionsAhmad SalimNo ratings yet
- Certificate training oil chemicalDocument1 pageCertificate training oil chemicalArham AnsariNo ratings yet
- NSCV C6a July2018Document112 pagesNSCV C6a July2018taddeoNo ratings yet
- Vadinar Essar TerminalDocument4 pagesVadinar Essar TerminalHittesh GuptaNo ratings yet
- Paper - GST2012 - Understanding The Physics of Trim - Nikolaj Lemb Larsen PDFDocument10 pagesPaper - GST2012 - Understanding The Physics of Trim - Nikolaj Lemb Larsen PDFIonut SmokeNo ratings yet
- Consignment Note: Customs CRN. Container No. Seal No. Customs Machine NoDocument5 pagesConsignment Note: Customs CRN. Container No. Seal No. Customs Machine NoMuhammad Siddique KhanNo ratings yet
- Victoria International Marina in The Port of Victoria Traffic Management Scheme ContextDocument1 pageVictoria International Marina in The Port of Victoria Traffic Management Scheme ContextSharedwatersNo ratings yet
- Nav IV MCQDocument4 pagesNav IV MCQGaurav ShuklaNo ratings yet