You might also like
- Práctica 01. Arranque Directo. MemoriaDocument8 pagesPráctica 01. Arranque Directo. MemoriaR7 E7No ratings yet
- Ejercicios de Maquinas Asincronicas y SincronicasDocument6 pagesEjercicios de Maquinas Asincronicas y Sincronicasoscar junior abarzua cerdaNo ratings yet
- Ejercício Técnicas Digitales2Document1 pageEjercício Técnicas Digitales2Anonymous at7kVdO68nNo ratings yet
- 2012 H Rotativas J Información-General Sandvik PDFDocument20 pages2012 H Rotativas J Información-General Sandvik PDFEdwin RodriguezNo ratings yet
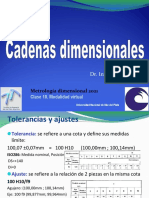
- Clase10-Metrologia-Cadenas DimensionalesDocument28 pagesClase10-Metrologia-Cadenas DimensionalesCiro Garcia RecioNo ratings yet
- Capitulo 4 ManiobrabilidadDocument6 pagesCapitulo 4 ManiobrabilidadDavid Alejandro DelgadoNo ratings yet
- Instrumentación Industrial y P&idDocument10 pagesInstrumentación Industrial y P&idAdrian OchoaNo ratings yet
- Mando neumático de cilindros mediante válvulasDocument43 pagesMando neumático de cilindros mediante válvulasElkjaer Yuri CJNo ratings yet
- Estampado en caliente: métodos, variables y simulaciónDocument13 pagesEstampado en caliente: métodos, variables y simulaciónLUIS ANGEL SANTILLAN BARBOSANo ratings yet
- ELE-213 Guía4 - JOSE BLANCO MARACAYO-2012-0997Document5 pagesELE-213 Guía4 - JOSE BLANCO MARACAYO-2012-0997Jose MaracayoNo ratings yet
- Protección térmica de motores eléctricos de inducciónDocument4 pagesProtección térmica de motores eléctricos de inducciónJuan Isidro De Leon GarciaNo ratings yet
- Lab 251 Lab 2 2023Document17 pagesLab 251 Lab 2 2023Paolet KilNo ratings yet
- Control de Instrumentacion PDFDocument8 pagesControl de Instrumentacion PDFLania100% (1)
- Secuencias Metodo IntuitivoDocument4 pagesSecuencias Metodo IntuitivosacorfilNo ratings yet
- Practica PWMDocument9 pagesPractica PWMIvan BalderasNo ratings yet
- Regulación de Los Generadores Trifásicos SíncronosDocument6 pagesRegulación de Los Generadores Trifásicos SíncronosVictor Alfredo Rios ChoqueNo ratings yet
- Tesis 44 PDFDocument52 pagesTesis 44 PDFalejo linares100% (1)
- Investigacion TransistoresDocument2 pagesInvestigacion TransistoresWolfgang AlíNo ratings yet
- Proyecto Redes de Aire 3.0Document13 pagesProyecto Redes de Aire 3.0callidemierdaNo ratings yet
- SP1 PDFDocument1 pageSP1 PDFMarco Antonio Quispe RoqueNo ratings yet
- Electronica de Potencia AsignaciónDocument7 pagesElectronica de Potencia AsignaciónSalvador de la PeñaNo ratings yet
- Laboratorio Diodos y Transistores Como Interruptor (Switch) y AmplificadorDocument8 pagesLaboratorio Diodos y Transistores Como Interruptor (Switch) y AmplificadorAndres JoseNo ratings yet
- Máquina CNC: Exposición sobre clases de máquina-herramientaDocument21 pagesMáquina CNC: Exposición sobre clases de máquina-herramientaOctavio GarzaNo ratings yet
- N°04 Diseño y Analisis BJTDocument8 pagesN°04 Diseño y Analisis BJTCesar Gabriel Canales MinayaNo ratings yet
- NNDocument18 pagesNNharold steve saez alfonsoNo ratings yet
- Cálculos de fuerzas, presiones y caudales en sistemas neumáticos e hidráulicosDocument4 pagesCálculos de fuerzas, presiones y caudales en sistemas neumáticos e hidráulicosNath AlvearNo ratings yet
- P3 Control de Avance y Retroceso ElectroneumaticoDocument4 pagesP3 Control de Avance y Retroceso ElectroneumaticoTsu NakataNo ratings yet
- Practica Laboratorio Motor TrifásicoDocument2 pagesPractica Laboratorio Motor TrifásicoJUAN DAVID FONSECA ORTIZNo ratings yet
- Introducción A La Máquina TérmicaDocument23 pagesIntroducción A La Máquina TérmicaEnri GonzálezNo ratings yet
- Texto7 CI Reguladores de Voltaje PDFDocument6 pagesTexto7 CI Reguladores de Voltaje PDFJesus C. CastilloNo ratings yet
- Neumatica EjerciciosDocument7 pagesNeumatica EjerciciosPablo SanchezNo ratings yet
- Linealizacion Sensor SharpDocument3 pagesLinealizacion Sensor SharpJhon Jairo Rojas MontanoNo ratings yet
- Fonseca García Informe2Document8 pagesFonseca García Informe2Andres ZapataNo ratings yet
- Teoria+MáDocument45 pagesTeoria+MáRafa Aroz Carmona67% (3)
- SCR Aplicaciones: Interruptor estático y control de faseDocument3 pagesSCR Aplicaciones: Interruptor estático y control de faseDaniela ToaingaNo ratings yet
- Flujo A Régimen PermanenteDocument12 pagesFlujo A Régimen PermanenteMarsella100% (1)
- Cuestionario Ii PDFDocument5 pagesCuestionario Ii PDFDaysi Guevara SandovalNo ratings yet
- 5 Cálculo de Redes Diametro de Tuberia Del Tubo en NeumaticaDocument7 pages5 Cálculo de Redes Diametro de Tuberia Del Tubo en Neumaticajhosue56No ratings yet
- Informe PLC Parte 2Document4 pagesInforme PLC Parte 2Hans Henry SeguelNo ratings yet
- INFORME-Rectificado en Superficies CilíndricasDocument22 pagesINFORME-Rectificado en Superficies CilíndricasPatricio PilatasigNo ratings yet
- Trabajo Preparatorio 1.2 Máquinas Eléctricas Lab 4351Document4 pagesTrabajo Preparatorio 1.2 Máquinas Eléctricas Lab 4351Andrés Amores RivasNo ratings yet
- Motores de Corriente Continua TrabajoDocument17 pagesMotores de Corriente Continua TrabajoJose Gabriel Torrealba OropezaNo ratings yet
- Laboratorio 6, Electr. de Potencia - Oscilador de Relajación UjtDocument6 pagesLaboratorio 6, Electr. de Potencia - Oscilador de Relajación UjtMaria HerreraNo ratings yet
- ISA Sociedad Americana de InstrumentaciónDocument10 pagesISA Sociedad Americana de InstrumentaciónVictor Jesús Alvarado AdamNo ratings yet
- Arranque de máquinas de CCDocument12 pagesArranque de máquinas de CCAarón MarxellyNo ratings yet
- Practica de GrafcetDocument12 pagesPractica de GrafcetGallardo KevinNo ratings yet
- 1 Ejercicios Cilindros NeumáticosDocument6 pages1 Ejercicios Cilindros NeumáticosHeiachyNo ratings yet
- EnunciadosDocument4 pagesEnunciadosVíctor JiménezNo ratings yet
- Servo ApuntesDocument9 pagesServo ApuntesJosé Ángel FernándezNo ratings yet
- Experimento 18Document7 pagesExperimento 18miguel angel ceballos aguadoNo ratings yet
- TraccionDocument45 pagesTraccionNelson FloresNo ratings yet
- Circuitos de Ladder ZelioDocument4 pagesCircuitos de Ladder ZelionarutoNo ratings yet
- Simbologia para Diagramas Electricos Tipo AmericanoDocument6 pagesSimbologia para Diagramas Electricos Tipo Americanojorge ivanNo ratings yet
- Informe de Laboratorio Lector de Frecuencia - TacometroDocument9 pagesInforme de Laboratorio Lector de Frecuencia - TacometroChistian SanchezNo ratings yet
- Batalla de CalamaDocument6 pagesBatalla de CalamaOliver Condori CruzNo ratings yet
- ET-Solar - 320WDocument2 pagesET-Solar - 320Wreivin27No ratings yet
- Control de Velocidad de Motores de CCDocument16 pagesControl de Velocidad de Motores de CCRuben Dario RodriguezNo ratings yet
- Informe Medicion de TiemposDocument4 pagesInforme Medicion de TiemposAlejandro MontoyaNo ratings yet
- Oleohidraulica 3 FaseDocument9 pagesOleohidraulica 3 FaseEnrique Chirinos LiraNo ratings yet
- Variador de Velocidad de Motor DCDocument28 pagesVariador de Velocidad de Motor DCAlex SanchezNo ratings yet
- 15paper VariadorDocument14 pages15paper VariadorJoan Perez PerezNo ratings yet
- Tipos de ArranqueDocument3 pagesTipos de Arranquecc_10No ratings yet
- Arranques de MotoresDocument8 pagesArranques de Motorescc_10No ratings yet
- Estructura InternaDocument30 pagesEstructura Internacc_10No ratings yet
- Centrales G Cap IIIDocument36 pagesCentrales G Cap IIIcc_10No ratings yet
- QuemadorDocument38 pagesQuemadorcc_10No ratings yet
- FRLs y Elementos Neumáticos de TrabajoDocument67 pagesFRLs y Elementos Neumáticos de Trabajocc_10No ratings yet
- Eight Ted Talks To Understand Climate ChangeDocument4 pagesEight Ted Talks To Understand Climate Changecc_10No ratings yet
- LabEP Prep8Document9 pagesLabEP Prep8cc_10No ratings yet
- Saltos y SubrutinasDocument20 pagesSaltos y Subrutinascc_10No ratings yet
- Maquina As in CronicaDocument103 pagesMaquina As in CronicaDarwin GualotoNo ratings yet
- Preparatorio6 PDFDocument7 pagesPreparatorio6 PDFcc_10No ratings yet
- Eficiencia Trafos PDFDocument47 pagesEficiencia Trafos PDFAndrade MiguelNo ratings yet
- Estructura InternaDocument30 pagesEstructura Internacc_10No ratings yet
- 8 RADIACION TERMICA (NXPowerLite)Document5 pages8 RADIACION TERMICA (NXPowerLite)cc_10No ratings yet
- Factor de PotenciaDocument52 pagesFactor de PotenciaAngel David Perez Vizuet100% (1)
- PlasmaDocument44 pagesPlasmacc_10100% (1)
- Generación Térmica de Energía ElectricaDocument9 pagesGeneración Térmica de Energía Electricacc_10No ratings yet
- Varinia Solari Tarea4Document9 pagesVarinia Solari Tarea4VariniaSolariDavagninoNo ratings yet
- Detailers Simon Guia Acabados y Recursos Arquitectura InteriorismoDocument45 pagesDetailers Simon Guia Acabados y Recursos Arquitectura InteriorismoSebastian Nicolas MartinezNo ratings yet
- Enciclopedia de Economía y Negocios Vol. 10 PDFDocument566 pagesEnciclopedia de Economía y Negocios Vol. 10 PDFAnonymous 5y4IxjnD100% (1)
- Cementera SamperDocument6 pagesCementera SamperBrayner Enrique Bedoya AlarconNo ratings yet
- PlexiglasDocument8 pagesPlexiglasJean Paul AguilarNo ratings yet
- Módulo 11 - Transiciones Educativas en Educación Parvularia PDFDocument20 pagesMódulo 11 - Transiciones Educativas en Educación Parvularia PDFWaldo Hernan González Guerra0% (1)
- Deber Anova Una ViaDocument8 pagesDeber Anova Una ViaLuis XavierNo ratings yet
- 3°actDocument3 pages3°actislena gallegoNo ratings yet
- Proyecto de Ingenieria Sanitaria IDocument52 pagesProyecto de Ingenieria Sanitaria IFranco D Yebara CastroNo ratings yet
- Clima de VenezuelaDocument2 pagesClima de VenezuelaLuzgaly Campo Lòpez0% (1)
- GestogramaDocument7 pagesGestogramaMatias CarreñoNo ratings yet
- Guía Práctica Fotodermatosis 2018Document18 pagesGuía Práctica Fotodermatosis 2018Leidy Lizbeth Caraguay GuamánNo ratings yet
- Introducción al curso de BioquímicaDocument14 pagesIntroducción al curso de BioquímicaPerafan Garcia HildaNo ratings yet
- Certificado de Calibracion ET y NivelDocument14 pagesCertificado de Calibracion ET y NivelWilliam Luis PazNo ratings yet
- Equipo3 U3A3 Presentación - PsiconeuroimunologíaDocument5 pagesEquipo3 U3A3 Presentación - PsiconeuroimunologíaANTONIO BASTIDA CRUZ100% (2)
- El Origen de La Palabra HOLA PDFDocument7 pagesEl Origen de La Palabra HOLA PDFjoseNo ratings yet
- Trabajo UnadDocument12 pagesTrabajo UnadAndrea RoyeroNo ratings yet
- Reconocemos nuestras característicasDocument7 pagesReconocemos nuestras característicasJose Espinoza Policarpo67% (3)
- Proyecto Plan de Mejoramiento PersonalDocument2 pagesProyecto Plan de Mejoramiento PersonalcolmmciedNo ratings yet
- Documento de Montreux America Latina EspDocument89 pagesDocumento de Montreux America Latina EspRafael Hipólito ÁvilaNo ratings yet
- Instalación planta eléctrica centro desarrollo infantil IbaguéDocument1 pageInstalación planta eléctrica centro desarrollo infantil IbaguéCamilo CepedaNo ratings yet
- Definición de WINS PDFDocument2 pagesDefinición de WINS PDFvenom360No ratings yet
- Propuesta Economica Steven Morales ValverdeDocument1 pagePropuesta Economica Steven Morales Valverdesteven moralesNo ratings yet
- HP Pavilion Dv4-2016laDocument2 pagesHP Pavilion Dv4-2016laHP_PSGNo ratings yet
- f6199184 Resumen de Bodas de SangreDocument3 pagesf6199184 Resumen de Bodas de SangreAgustina OrsiNo ratings yet
- Administración y Organización de Empresas TR3Document7 pagesAdministración y Organización de Empresas TR3Jhona Cunza RiveraNo ratings yet
- Gutierrez Ramirez - Juan Luis - Tipos de Investigación.Document1 pageGutierrez Ramirez - Juan Luis - Tipos de Investigación.jarolin toribio encarnacionNo ratings yet
- Deficit HabitacionalDocument3 pagesDeficit HabitacionalCesia Aburto PizarroNo ratings yet
- Foro 1Document7 pagesForo 1Sofia Monge CastillaNo ratings yet
- La Trazabilidad de La Selección de PersonalDocument4 pagesLa Trazabilidad de La Selección de Personalstefany100% (6)