You might also like
- Pretreatment For Powder CoatingDocument15 pagesPretreatment For Powder Coatingsateeshsingh100% (1)
- SJVNL Apprentice Posts NotificationDocument3 pagesSJVNL Apprentice Posts NotificationtongocharliNo ratings yet
- Digital Signal Processing Notes-1 PDFDocument445 pagesDigital Signal Processing Notes-1 PDFWar Machine100% (2)
- GATE 2013 Electrical Engineering Previous Year Paper PDFDocument20 pagesGATE 2013 Electrical Engineering Previous Year Paper PDFArif Hussain AlamNo ratings yet
- Brushless DC Motors Are A Type of Synchronous MotorDocument16 pagesBrushless DC Motors Are A Type of Synchronous MotorPathanjali KumarNo ratings yet
- Plating Kaizen Sheet 7.02.09Document6 pagesPlating Kaizen Sheet 7.02.09sunil kumarNo ratings yet
- Rural Questionnare V 5 0 ManualDocument10 pagesRural Questionnare V 5 0 Manualsunil kumarNo ratings yet
- FIS for Image Contrast EnhancementDocument4 pagesFIS for Image Contrast Enhancementsunil kumarNo ratings yet
- A 252929Document46 pagesA 252929sunil kumarNo ratings yet
- AMIE Study Material & Admission Packages AMIE (I) Study Circle, RoorkeeDocument58 pagesAMIE Study Material & Admission Packages AMIE (I) Study Circle, Roorkeesunil kumarNo ratings yet
- 170Document5 pages170sunil kumarNo ratings yet
- EC01 - 2014 Gate 2014 Question PaperDocument17 pagesEC01 - 2014 Gate 2014 Question Paperrakesh_rodyNo ratings yet
- SynopsisDocument11 pagesSynopsissunil kumarNo ratings yet
- 3 1Document19 pages3 1api-3717843100% (1)
- Sample Thesis ReportDocument62 pagesSample Thesis ReportSiwa KanagarajNo ratings yet
- Stepper Motor Speed ControlDocument5 pagesStepper Motor Speed Controlsunil kumarNo ratings yet
- Lec 1Document48 pagesLec 1Alwin Anno SastraNo ratings yet
- Energy Conversions IncDocument5 pagesEnergy Conversions Incsunil kumarNo ratings yet
- Entrepreneurship DevelopmentDocument12 pagesEntrepreneurship DevelopmentRohit ShindeNo ratings yet
- Siemens Micro Master 420 ManualDocument218 pagesSiemens Micro Master 420 Manualamiteshdinda100% (1)
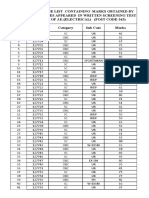
- Roll Number Wise JE(Electrical) Marks ListDocument3 pagesRoll Number Wise JE(Electrical) Marks Listsunil kumarNo ratings yet
- Harsha WeldingFederal Mogul 15 11Document1 pageHarsha WeldingFederal Mogul 15 11sunil kumarNo ratings yet
- Symbols For EarthDocument5 pagesSymbols For Earthsunil kumarNo ratings yet
- 1 Entrepreneurship and Development Lab Front PageDocument7 pages1 Entrepreneurship and Development Lab Front Pagesunil kumarNo ratings yet
- Common Earth Symbols ExplainedDocument5 pagesCommon Earth Symbols Explainedsunil kumarNo ratings yet
- Report WritingDocument5 pagesReport Writingsunil kumarNo ratings yet
- Standard Electrical SymbolsDocument40 pagesStandard Electrical Symbolssilviamenegazzo100% (13)
- A Review On Rapid Control of A Brushless Motor in An Hybrid SystemDocument4 pagesA Review On Rapid Control of A Brushless Motor in An Hybrid Systemsunil kumarNo ratings yet
- Simulation & Controlling of Brushless DC Motor Using PI/Fuzzy HybridDocument4 pagesSimulation & Controlling of Brushless DC Motor Using PI/Fuzzy Hybridsunil kumarNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Catalogo General KOBA 1000 - e - 2012revDocument21 pagesCatalogo General KOBA 1000 - e - 2012revTECNIMETALNo ratings yet
- Count rows in all tablesDocument25 pagesCount rows in all tablessatya1401No ratings yet
- SLVR Cartas PDFDocument18 pagesSLVR Cartas PDFEdgar David Ruelas ClarosNo ratings yet
- Astm D365Document3 pagesAstm D365Frank LeeNo ratings yet
- Blueendo MorcellatorDocument7 pagesBlueendo MorcellatorLia GuslianiNo ratings yet
- Iso Noremark 2 PDFDocument86 pagesIso Noremark 2 PDFAkhmad MakhrusNo ratings yet
- Ult Studio Config 71Document18 pagesUlt Studio Config 71JoséGuedesNo ratings yet
- Arc Flash and Electrical Safety HazardsDocument24 pagesArc Flash and Electrical Safety HazardsJulios Charl Panuncialman TagupaNo ratings yet
- FC100 ServiceManual MG90L102Document209 pagesFC100 ServiceManual MG90L102Said BoubkerNo ratings yet
- HandRail Specsgf For CfvdrfsDocument3 pagesHandRail Specsgf For CfvdrfsTarek TarekNo ratings yet
- Assignment No1 Current and ElectricityDocument1 pageAssignment No1 Current and ElectricityshreyaNo ratings yet
- Friction in OrthodonticsDocument9 pagesFriction in Orthodonticsaa bbNo ratings yet
- VW T-Cross 2019+ - Connector ViewsDocument220 pagesVW T-Cross 2019+ - Connector ViewsMucowera AshaNo ratings yet
- Verdi TCL TrainingDocument24 pagesVerdi TCL TrainingPratyush ShrotriyaNo ratings yet
- 11 - Desain, Prototipe Dan KonstruksiDocument46 pages11 - Desain, Prototipe Dan KonstruksiUtari Via VivianNo ratings yet
- Analysis of 3PL and 4PL ContractsDocument8 pagesAnalysis of 3PL and 4PL ContractsGoutham Krishna U BNo ratings yet
- SEREP System Equivalent ReductionDocument2 pagesSEREP System Equivalent ReductiondogusNo ratings yet
- Installation Manual: Automatic TWIN Greasing SystemDocument62 pagesInstallation Manual: Automatic TWIN Greasing SystemWill FrontNo ratings yet
- Atlassian Certificate-IsO 27001Document2 pagesAtlassian Certificate-IsO 27001David BriggsNo ratings yet
- Detailed Analysis of Plane Table SurveyingDocument11 pagesDetailed Analysis of Plane Table SurveyingNirbhay SinghNo ratings yet
- Ec7 WallapDocument20 pagesEc7 WallapJack DoverNo ratings yet
- Project 1 Fettuccini Truss Bridge ReportDocument23 pagesProject 1 Fettuccini Truss Bridge ReportKah LeongNo ratings yet
- Centerline Alfa Catalog13Document53 pagesCenterline Alfa Catalog13sisonco100% (1)
- Main Bearing Journal: Shutdown SIS Previous ScreenDocument3 pagesMain Bearing Journal: Shutdown SIS Previous Screenariy yuli styawanNo ratings yet
- Fire Extinguisher Location and Placement: Fact SheetDocument2 pagesFire Extinguisher Location and Placement: Fact SheetEli NaguitNo ratings yet
- Selective photocatalytic recovery of platinum, rhodium and palladiumDocument8 pagesSelective photocatalytic recovery of platinum, rhodium and palladiumSarangNo ratings yet
- Variational Asymptotic BeamDocument43 pagesVariational Asymptotic BeamAdimasu AyeleNo ratings yet
- A Case Study On The Unique Features of The Leading Database SystemsDocument2 pagesA Case Study On The Unique Features of The Leading Database SystemsLiezheel Mynha AlejandroNo ratings yet
- Teleprotection Terminal InterfaceDocument6 pagesTeleprotection Terminal InterfaceHemanth Kumar MahadevaNo ratings yet
- Soalan Assignment Stm10173Document7 pagesSoalan Assignment Stm10173Razanah RozaimayNo ratings yet